一种曲臂起重机的制作方法
1.本实用新型涉及起重机领域,尤其涉及一种曲臂起重机。
背景技术:
2.曲臂起重机是轻型旋臂起重机的一种,安装在工程车辆和救援、运输等车辆上,具有两个回转装置,其一是立柱上的回转装置,可以带动整个旋臂的转动;其二是旋臂上的回转装置,可以带动前旋臂与后旋臂之间的相对转动。曲臂起重机利用旋臂的弯曲和旋转运动,来控制电动葫芦避让物体,到预定位置吊取物品,使工作区域最大化。
3.目前的曲臂起重机存在以下缺陷:
4.1、传统的曲臂起重机在需要围绕着立柱较大范围调取物品时,需要转动立柱上的回转装置,于此同时,固定旋臂上的回转装置,然而由于电动葫芦上所挂重物在移动过程中的惯性,往往会带动旋臂上的回转装置转动,严重影响物品吊运安全,以及影响吊运效率。
5.2、目前有相当一部分曲臂起重机都不具有起重限制装置,都是根据设备自身的承重限度来衡量,没有将起重重量限制在一个安全范围内,如果起重物超出起重机的最大限度,不仅容易造成设备损坏,而且不利于人员安全,甚至引发安全事故。
6.因此,目前亟需一种既能防超载,又能有效防止在吊运过程旋臂上的回转装置转动的一种曲臂起重机。
技术实现要素:
7.本实用新型的目的在于克服上述不足,提供一种既能防超载,又能有效防止在吊运过程旋臂上的回转装置转动的一种曲臂起重机。
8.本实用新型的目的是这样实现的:
9.一种曲臂起重机,包括包含有下立柱、上立柱、后旋臂、前旋臂、电动葫芦和锁定装置;所述上立柱通过第一回转装置安装在下立柱上,上立柱相对下立柱转动,所述后旋臂与上立柱固定;所述上立柱侧面设置有固定环,锁紧装置的一端通过连接杆连接固定环;所述锁紧装置的另一端连接固定杆,固定杆上设置有挂钩;所述固定环的下方设置有勾环;所述前旋臂通过第二回转装置连接后旋臂,前旋臂与后旋臂相对转动;所述前旋臂的顶端设置有吊头,吊头的下方设置有电动葫芦,电动葫芦连接着线缆,线缆的下端连接遥控器;所述吊头的侧面设置有固定突出,固定突出上开设有勾孔。
10.所述电动葫芦的顶部悬挂处设置有超载感应挂轴,电动葫芦的左侧设有显示器;所述超载感应挂轴连接控制器,控制器连接有显示器、报警器和开关。
11.所述后旋臂与上立柱下方固定安装有支撑架;所述后旋臂的下方固定有扶手。
12.所述第一回转装置和第二回转装置由电机驱动。
13.与现有技术相比,本实用新型的有益效果是:
14.1、本实用新型一种曲臂起重机设置有锁紧装置,锁紧装置通过固定杆连接固定环,并且可以相对固定环自由活动;在无需使用锁紧功能时,锁紧装置一端通过挂钩勾紧勾
环,锁紧装置固定在上立柱的侧面;本实用新型一种曲臂起重机设置有吊头、固定突出和勾孔,在需要固定前旋臂防止第二回转装置转动时,锁紧装置一端通过挂钩勾住勾孔;本实用新型一种曲臂起重机通过简单而精巧的设计,避免了在第一回转装置转动时,由于电动葫芦吊取的货物惯性的原因,导致第二回转装置转动的问题,不仅提高了物品吊运效率,而且提高了生产安全性。
15.2、本实用新型一种曲臂起重机在电动葫芦悬挂处设置了超载感应挂轴,在工厂预设值好额定起重量,只要超过额定起重量,电动葫芦就会断电保护,电动葫芦只能下降,不能升高,同时超载显示屏显示实际的起重量载荷值,并闪烁报警,防止设备因超出其承载量而损坏,避免了超载事故的发生。
附图说明
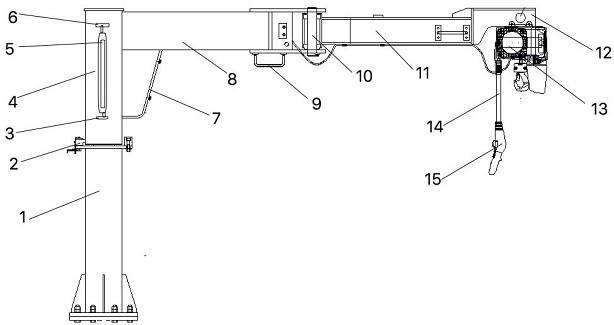
16.图1为本实用新型一种曲臂起重机的结构示意图。
17.图2为本实用新型一种曲臂起重机的俯视图。
18.图3为本实用新型一种曲臂起重机中显示屏的示意图。
19.图4为本实用新型一种曲臂起重机中超载感应挂轴的示意图。
20.图5为本实用新型一种曲臂起重机中超载感应挂轴、显示器、控制器、报警器和开关连接示意图。
21.其中:下立柱1、第一回转装置2、勾环3、上立柱4、锁定装置5、固定环6、支撑架7、后旋臂8、扶手9、第二回转装置10、前旋臂11、吊头12、电动葫芦13、线缆14、遥控器15、连接杆16、固定杆17、挂钩18、勾孔19、固定突出20、显示器21、超载感应挂轴22、控制器23、报警器24、开关25。
具体实施方式
22.参见图1至图5,本实用新型涉及的一种曲臂起重机,包含有下立柱1、上立柱4、后旋臂8、前旋臂11、电动葫芦13和锁定装置5;所述下立柱1的下端通过地脚螺栓固定工程车辆和救援、运输车辆上;所述上立柱4通过第一回转装置2安装在下立柱1上,上立柱4相对下立柱1转动,所述后旋臂8与上立柱4固定;所述上立柱4侧面设置有固定环6,锁紧装置5的一端通过连接杆16连接固定环6,锁紧装置5可以相对固定环6转动;所述锁紧装置5的另一端连接固定杆17,固定杆17上设置有挂钩18;所述固定环6的下方设置有勾环3,当锁紧装置5不使用时,挂钩18勾住勾环3;所述前旋臂11通过第二回转装置10连接后旋臂8,前旋臂11与后旋臂8相对转动;所述前旋臂11的顶端设置有吊头12,吊头12的下方设置有电动葫芦13,电动葫芦13连接着线缆14,线缆14的下端连接遥控器15,遥控器15可以用来控制电动葫芦13上吊钩的下方或上提;所述吊头12的侧面设置有固定突出20,固定突出20上开设有勾孔19,当需要固定前旋臂11防止第二回转装置10转动时,挂钩18勾住勾孔19。
23.所述电动葫芦13的顶部悬挂处设置有超载感应挂轴22,超载感应挂轴22可以实时感应电动葫芦13挂载的重量,电动葫芦13的左侧设有显示器21,显示器21可以实时显示超载感应挂轴22监测的重量;所述超载感应挂轴22连接控制器23,控制器23连接有显示器21、报警器24和开关25,当超载感应挂轴22感应到电动葫芦13挂载的重量超过预设的额定起吊重量时,控制器23把超载重量传输给显示器21,并且给报警器24信号闪烁,同时关闭电动葫
芦13的开关25,电动葫芦13只能下降将超载货物放下。
24.所述后旋臂9与上立柱4下方固定安装有支撑架7,起到加固后旋臂8与上立柱4连接的作用;所述后旋臂8的下方固定有扶手9,可以供操作人员手动操作。
25.所述第一回转装置2和第二回转装置10由电机驱动。
26.另外:需要注意的是,上述具体实施方式仅为本专利的一个优化方案,本领域的技术人员根据上述构思所做的任何改动或改进,均在本专利的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1