一种灌装膏状过氧化环己酮所用的支管输送装置的制作方法
1.本实用新型涉及过氧化环己酮输送技术领域,具体涉及一种灌装膏状过氧化环己酮所用的支管输送装置。
背景技术:
2.过氧化环己酮是一种化学物质,英文名称cyclohexanone peroxide;别名1-过氧化氢环己基;分子式c12h22o5;白色及淡黄色针状结晶或粉末,商品通常为含有溶剂的浆状物,主要用作橡胶、塑料合成中的交联剂和引发剂。
3.现有的过氧化环己酮的灌装生产,需要支管输送装置把胶管送到转运位置,然后再通过机械臂把胶管从转运位置上取走,并插至灌装装置的杯座上,杯座上的胶管必须为开口朝上设置,因为灌装装置只能对开口朝上的胶管进行灌装处理,由于从下管装置下料至支管输送装置上的胶管的开口朝向方向不一,为了胶管能在转运位置上被机械臂取走,并被机械臂正确的插至灌装装置的杯座上,就需要在支管输送装置上把开口朝向方向不正确的胶管进行重新摆正,而现有的支管输送装置主要通过工人目检出开口朝向不正确的胶管,然后工人把开口朝向不正确的胶管进行重新摆正,以便为了胶管能在转运位置上被机械臂取走,并被机械臂正确的插至灌装装置的杯座上,而采用人工目检和人工摆正胶管的方法,工人劳动强度大,生产效率低,且人工目检容易出现漏看,从而容易导致一些开口朝向不正确的胶管不能在支管输送装置上被及时的进行重新摆正,这使得机械臂不能把胶管正确的插至灌装装置的杯座上,不利于后续的灌装装置对胶管进行灌装处理。
技术实现要素:
4.有鉴于此,本实用新型目的是提供一种能通过自动摆正胶管而确保胶管的开口方向正确的、提高输送效率的和有利于后续的灌装装置对胶管进行灌装处理的灌装膏状过氧化环己酮所用的支管输送装置。
5.为了解决上述技术问题,本实用新型的技术方案是:一种灌装膏状过氧化环己酮所用的支管输送装置,包括工作台,位于所述工作台一侧的控制箱,设置在所述工作台上的传送机构,放置在所述传送机构上的胶管,还包括设置在所述工作台上的调整机构;所述调整机构包括用于更改所述胶管的摆放方向的转向组合、用于检测所述胶管到达的感应电眼和用于对所述胶管进行测距的测距器,沿所述传送机构的运动方向,依次为所述感应电眼和测距器。
6.作为优选,所述工作台上设置有位于所述传送机构两侧的、用于防止所述胶管在传送过程中出现偏移的限位挡板;所述感应电眼通过连接板与限位挡板进行固定。
7.作为优选,所述转向组合包括位于所述传送机构上方的旋转电机,设置在所述旋转电机的输出端的、位于所述旋转电机和传送机构之间的升降气缸,设置在所述升降气缸的输出端的、位于所述升降气缸和传送机构之间的吸附块,所述旋转电机通过第一安装板固定安装在传送机构的上方,所述第一安装板通过第一支撑杆与工作台进行固定。
8.作为优选,所述吸附块的底部设置有若干个等距分布的真空吸盘,所述真空吸盘为开口朝下设置。
9.作为优选,所述测距器通过第二安装板固定安装在传送机构的上方,所述第二安装板通过第二支撑杆与工作台进行固定,所述测距器的发射方向与传送机构的运动方向相反,且所述测距器的发射方向与胶管的中心位于同一直线上,有利于测距器对胶管进行准确的测距。
10.作为优选,所述传送机构包括步进电机、主动轮、输送带、从动轮和安装杆,所述步进电机的输出端固定连接有主动轮,所述主动轮通过输送带与从动轮传动连接,所述主动轮和从动轮通过安装杆固定安装工作台上,所述步进电机与控制箱电性连接。
11.本实用新型技术效果主要体现:通过感应电眼检测胶管的到达,然后测距器对胶管进行测距,控制箱根据测距结果判断胶管的摆放方向,转向组合对摆放方向不正确的胶管进行转向,实现胶管的自动摆正,因此,本输送装置能通过调整机构对胶管进行自动摆正,从而确保胶管的开口方向正确,不仅能提高输送效率,还能有利于后续的灌装装置对胶管进行灌装处理,提高灌装膏状过氧化环己酮的生产效率。
附图说明
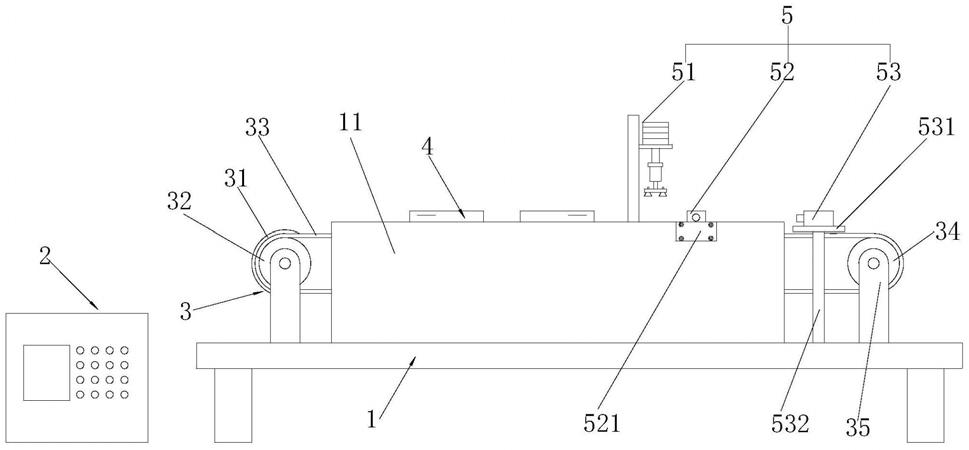
12.图1为本实用新型一种灌装膏状过氧化环己酮所用的支管输送装置的结构示意图;
13.图2为图1的部分俯视示意图;
14.图3为图1的胶管的立体结构示意图;
15.图4为图1的调整机构的结构示意图;
16.图5为本实用新型一种灌装膏状过氧化环己酮所用的支管输送装置的系统框图。
具体实施方式
17.以下结合附图,对本实用新型的具体实施方式作进一步详述,以使本实用新型技术方案更易于理解和掌握。
18.在本实施例中,需要理解的是,术语“中间”、“上”、“下”、“顶部”、“右侧”、“左端”、“上方”、“背面”、“中部”、等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
19.另,在本具体实施方式中如未特别说明部件之间的连接或固定方式,其连接或固定方式均可为通过现有技术中常用的螺栓固定或钉销固定,或销轴连接等方式,因此,在本实施例中不在详述。
20.一种灌装膏状过氧化环己酮所用的支管输送装置,如图1-2所示,包括工作台1,位于所述工作台1一侧的控制箱2,设置在所述工作台1上的传送机构3,放置在所述传送机构3上的胶管4,还包括设置在所述工作台1上的调整机构5;所述调整机构5包括用于更改所述胶管4的摆放方向的转向组合51、用于检测所述胶管4到达的感应电眼52和用于对所述胶管4进行测距的测距器53,沿所述传送机构3的运动方向,依次为所述感应电眼52和测距器53,沿所述传送机构3的运动方向,依次为所述感应电眼52和测距器53,所述感应电眼52和测距
器53均与控制箱2电性连接。所述工作台1上设置有位于所述传送机构3两侧的、用于防止所述胶管4在传送过程中出现偏移的限位挡板11;所述感应电眼52通过连接板521与限位挡板11进行固定。所述传送机构3包括步进电机31、主动轮32、输送带33、从动轮34和安装杆35,所述步进电机31的输出端固定连接有主动轮32,所述主动轮32通过输送带33与从动轮34传动连接,所述主动轮32和从动轮34通过安装杆35固定安装工作台1上,所述步进电机31与控制箱2电性连接。所述测距器53通过第二安装板531固定安装在传送机构3的上方,所述第二安装板531通过第二支撑杆532与工作台3进行固定,所述测距器53的发射方向与传送机构3的运动方向相反,且所述测距器53的发射方向与胶管4的中心位于同一直线上,有利于测距器53对胶管4进行准确的测距。
21.如图3所示,所述胶管4上画有标记线41的一端为胶管4的尾端42,也就是所述胶管4为开口设置的一端,所述胶管4上远离标记线41的一端为胶管4的首端43,也就是所述胶管4为不开口设置的一端。
22.如图4所示,结合图1-2理解,所述转向组合51包括位于所述传送机构3上方的旋转电机511,设置在所述旋转电机511的输出端的、位于所述旋转电机511和传送机构3之间的升降气缸512,设置在所述升降气缸512的输出端的、位于所述升降气缸512和传送机构3之间的吸附块513,所述旋转电机512通过第一安装板514固定安装在传送机构3的上方,所述第一安装板514通过第一支撑杆515与工作台1进行固定。所述吸附块513的底部设置有若干个等距分布的真空吸盘5131,所述真空吸盘5131为开口朝下设置。
23.如图5所示,结合图1和图2理解,当感应电眼52检测到胶管4到达,控制箱2收到感应电眼52的关于胶管4的到达信号,控制箱2立即控制步进电机31停止,然后控制箱2控制测距器53发射激光对胶管4进行测距,测距器53把测距结果传回控制箱2,控制箱2根据测距结果判断胶管4的开口朝向是否正确,若胶管4的开口朝向正确,控制箱2立即控制步进电机31启动,通过输送带13把胶管4送走,若胶管4的开口朝向不正确,控制箱2控制升降气缸512带动真空吸盘5131下降,控制箱2控制真空吸盘5131吸附固定胶管4,控制箱2控制升降气缸512带动胶管4上升,然后控制箱2控制旋转电机511进行旋转,从而对胶管4进行摆正,旋转完毕后,控制箱2控制升降气缸512带动胶管4下降,控制箱2控制真空吸盘5131放开胶管4,控制箱2控制升降气缸512带动真空吸盘5131上升,控制箱2再启动步进电机31,通过输送带13把胶管4送走。
24.在本实施例中,所述控制箱2为型号s7-300的plc控制器,所述感应电眼52为型号bv-501-rgb的电眼传感器,所述测距器53为型号makerfirex2125xmm的激光测距器,所述步进电机31型号为130byg350,所述旋转电机511的型号为60tkyz,所述升降气缸512的型号为sc40*75,所述真空吸盘5131的型号为zpt40hn/s-j25-b01-a18。
25.工作原理:当胶管4在输送带13的作用下到达感应电眼52的位置时,感应电眼52检测到胶管4到达并把信号传回控制箱2,控制箱2收到感应电眼52的胶管4的到达信号,控制箱2立即控制步进电机31停止,然后测距器53发射激光对胶管4进行测距。若胶管4的首端朝向测距器53,由于胶管4的首端为不开口设置,因此测距器53测出的胶管4的距离为a,控制箱2判断胶管4的摆放方向正确,无需进行调整,控制箱2控制步进电机31启动,输送带13把胶管4输送到转运位置,最后通过机械臂把胶管4从转运位置上取走。若胶管4的尾端朝向测距器53,由于胶管4的尾端为开口设置,因此测距器53测出的胶管4的距离大于a,控制箱2判
断胶管4的摆放方向不正确,然后控制箱2控制升降气缸512带动吸附块513往下运动,并通过吸附块513的真空吸盘5131对胶管4进行吸附固定,真空吸盘5131吸附固定住胶管4后,控制箱2控制升降气缸512带动吸附块513往上复位,从而带动胶管4离开输送带13,然后控制箱2控制旋转电机511带动吸附块513旋转180
°
,从而通过吸附块513带动胶管4旋转180
°
,从而使得胶管4的首端朝向测距器53方向,即转向组合51把胶管4进行了重新摆正,然后升降气缸512带动吸附块513下降,吸附块513带着胶管4回到输送带13上,然后吸附块513的真空吸盘5131松开胶管4,胶管4被重新放回了输送带13上,然后控制箱2控制步进电机31启动,输送带13把胶管4输送到转运位置,最后通过机械臂把胶管4从转运位置上取走。
26.本实用新型技术效果主要体现:通过感应电眼检测胶管的到达,然后测距器对胶管进行测距,控制箱根据测距结果判断胶管的摆放方向,转向组合对摆放方向不正确的胶管进行转向,实现胶管的自动摆正,因此,本输送装置能通过调整机构对胶管进行自动摆正,从而确保胶管的开口方向正确,不仅能提高输送效率,还能有利于后续的灌装装置对胶管进行灌装处理,提高灌装膏状过氧化环己酮的生产效率。
27.当然,以上只是本实用新型的典型实例,除此之外,本实用新型还可以有其它多种具体实施方式,凡采用等同替换或等效变换形成的技术方案,均落在本实用新型要求保护的范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1