一种防止钢缆晃动的变电器搬运龙门吊的制作方法
1.本实用新型涉及一种龙门吊,具体涉及一种防止钢缆晃动的变电器搬运龙门吊。
背景技术:
2.在变压器的生产工艺中,需要在各个生产线上搬动变压器。由于变压器重量较大,人力无法搬动。因此,在车间中会安装有小型龙门吊,利用龙门吊将变压器从一个工序搬运到另一个工序。但在实际的使用过程中,发现现有龙门吊存在一些问题。
3.一是,工人在将挂钩挂在变压器上时,往往不是等龙门吊恰好行驶到变压器的正上方,而是在龙门吊行驶到差不多位置时,便会将挂钩挂在变压器上。这将导致钢缆与地面不是垂直的而是呈一定角度。当龙门吊起吊时,变压器会在重力的作用下发生晃动,威胁工人生命安全。
4.二是,由于变压器重量较大,惯性较大。因此,当龙门吊起吊或停止吊运时,变压器会在惯性的作用下发生晃动,威胁工人的生命安全。
5.三是,由于生产车间空间比较紧张,工人较多。因此,在变压器吊运的过程中可能会磕碰到工人。
6.因此,本实用新型公开了一种防止钢缆晃动的变电器搬运龙门吊以解决上述技术问题。
技术实现要素:
7.为解决现有技术存在的不足,本实用新型提供了一种防止钢缆晃动的变电器搬运龙门吊。
8.本实用新型的技术方案为:
9.本实用新型提供了一种防止钢缆晃动的变电器搬运龙门吊,包括可沿着导轨前后移动的龙门吊本体、起吊模块。所述起吊模块包括设置在所述龙门吊本体上并可以左右移动的起重小车、通过钢缆与所述起重小车相连的基板,所述基板可在所述钢缆的带动下上下位移,所述基板与所述起重小车之间设置有剪叉加强模块。所述剪叉加强模块包括若干剪叉单元、若干转轴,相邻两个剪叉单元通过转轴连接,所述剪叉加强模块可自由压缩、伸展。所述剪叉单元包括外剪叉框架、内剪叉框架,所述外剪叉框架、内剪叉框架的两端均设置有通孔,所述内剪叉框架设置在所述外剪叉框架之内并通过连接轴可旋转连接。
10.进一步,所述龙门吊本体包括前、后桥架、左、右支腿,所述左、右支腿底部均设置有行走机构。
11.进一步,所述行走机构包括外壳、行走轮、前后行走电机。
12.进一步,所述起重小车包括主体框架、左右行走电机、主动轮、起重电机、钢缆滚筒。
13.进一步,所述剪叉加强模块的两端分别通过若干缓冲单元与所述主体框架、基板相连。
14.进一步,所述缓冲单元包括带有凹槽的第一滑块、缓冲弹簧。
15.进一步,所述基板底部固定有电磁铁。
16.进一步,所述基板的围壁上沿周长方向均匀设置有若干激光测距传感器。
17.进一步,包括报警模块,所述报警模块包括音响、警灯。
18.进一步,包括控制系统,所述控制系统包括plc控制器、无线电信号接收装置、遥控器。
19.本实用新型所达到的有益效果为:
20.本实用新型通过剪叉加强模块对龙门吊的起吊系统进行加强,既不影响龙门吊的正常使用,又防止在吊运变压器时,变压器来回晃动,威胁工人安全。
21.同时,本实用新型在剪叉加强模块与起重小车、基板的连接处设置有缓冲单元,起到缓冲作用,防止起吊或吊运停止后,重物的惯性力直接作用在本实用新型的结构上,损坏本实用新型。
22.而且,本实用新型基板的四周设置有激光测距传感器,可以检测基板四周是否有人,当工人距基板的距离小于安全值时,报警模块就会报警,提醒工人躲避。当距离进一步缩小达到极限值时,本实用新型就会停止前进,以保护工人的生命安全。
23.此外,本实用新型还具有结构简单可靠、价格低廉等优点。
附图说明
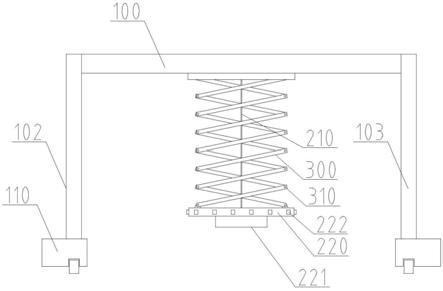
24.图1是本实用新型主视图。
25.图2是起重小车主视图。
26.图3是剪叉单元立体图。
27.图4是缓冲单元结构示意图。
28.图中,100、前桥架;101、后桥架;102、左支腿;103、右支腿;104、齿条;110、行走机构;200、主体框架;201、左右行走电机;202、主动轮;203、起重电机;204、钢缆滚筒;210、钢缆;220、基板;221、电磁铁;222、激光测距传感器;300、剪叉加强模块;310、转轴;320、剪叉单元;321、外剪叉框架;322、内剪叉框架;323、通孔;324、连接轴;400、第一滑块;401、缓冲弹簧。
具体实施方式
29.为便于本领域的技术人员理解本实用新型,下面结合附图说明本实用新型的具体实施方式。
30.如图1~4所示,本实用新型提供了一种防止钢缆晃动的变电器搬运龙门吊,包括可沿着导轨前后移动的龙门吊本体、起吊模块。所述龙门吊本体包括前桥架100、后桥架101、左支腿102、右支腿103,所述前、后桥架的两端均分别垂直设置在所述左、右支腿上,所述前、后桥架的内侧壁上均设置有若干第一滑槽。所述左、右支腿底部均设置有行走机构110,所述行走机构110包括外壳、设置在所述外壳上并与导轨相配的行走轮、设置在所述外壳内的前后行走电机,所述前后行走电机的输出轴与所述行走轮相连,所述龙门吊本体可以在前后行走电机的带动下沿导轨前后移动。
31.所述起吊模块包括起重小车、基板220、设置在所述基板220上的电磁铁221、剪叉
加强模块300。所述起重小车包括主体框架200、左右行走电机201、主动轮202、起重电机203、钢缆滚筒204、钢缆210,所述主体框架200设置在所述前、后桥架之间,所述主体框架200的外侧壁上设置有若干与所述第一滑槽相配的第二滑块。所述主动轮202设置在所述左右行走电机201的输出轴端部,所述前桥架100的内侧壁设置有齿条104,所述主动轮202与所述齿条104相互咬合。所述主体框架200可以在左右行走电机201的带动下沿着所述第一滑槽左右移动。所述起重电机203与所述钢缆滚筒204相连,所述钢缆滚筒204可在起重电机203的带动下自由转动,所述钢缆210通过设置在所述主体框架200上的滑轮组一端与所述钢缆滚筒204相连,另一端与所述基板220相连,所述基板220可以在所述起重电机203的带动下上下移动。
32.所述主体框架200与所述基板220之间设置有剪叉加强模块300,所述剪叉加强模块300包括若干剪叉单元320、若干转轴310,相邻两个剪叉单元320通过转轴310连接,所述剪叉加强模块300可自由压缩、伸展,所述剪叉加强模块300用来固定基板220,防止基板220来回晃动,威胁工人生命安全。所述剪叉单元320包括外剪叉框架321、内剪叉框架322,所述外剪叉框架321、内剪叉框架322的两端均设置有通孔323,所述内剪叉框架322设置在所述外剪叉框架321之内并通过连接轴324可旋转连接。
33.进一步,所述剪叉加强模块300的两端分别通过若干缓冲单元与所述主体框架200、基板220相连,防止在开始吊运或吊运停止后,重物的惯性力直接作用在本实用新型的结构上,损坏本实用新型。所述缓冲单元包括带有凹槽的第一滑块400、缓冲弹簧401,所述凹槽内设置有轴,所述轴穿过所述外剪叉框架321或内剪叉框架322的端部的通孔323,所述外剪叉框架321或内剪叉框架322可围绕所述轴自由转动。所述主体框架200、基板220均设置有若干与所述第一滑块400相配的第二滑槽,所述第一滑块400可沿着所述第二滑槽滑动,所述缓冲弹簧401一端与所述第二滑槽的底部相连,另一端与所述第一滑块400相连。当本实用新型吊起重物开始左右移动或前后移动时,由于惯性的存在,重物会对剪叉加强模块300施加一个反方向的力,这样缓冲弹簧401会被压缩,吸收动能,防止剪叉加强模块300与其他结构刚性接触。
34.进一步,所述基板220的围壁上沿周长方向均匀设置有若干激光测距传感器222,所述激光测距传感器222用来测定基板220附近是否有人。所述前、后桥架上设置有报警模块,所述报警模块包括音响、警灯。在本实用新型工作时,当工人距基板220的距离小于安全值时,报警模块就会报警,音响响起,警灯闪烁,提醒工人躲避。当距离进一步缩小达到极限值时,本实用新型就会停止前进,以保护工人的生命安全,防止意外发生。
35.进一步,本实用新型还包括控制系统,所述控制系统包括遥控器、设置在桥架上的plc控制器、无线电信号接收装置。所述plc控制器与所述无线电信号接收装置、前后行走电机、左右行走电机201、起重电机203、激光测距传感器222、音响、警灯相连,所述plc控制器负责控制本实用新型上各设备的运转。所述遥控器包括遥控器外壳、设置在所述遥控器外壳上的若干控制按钮、设置在所述遥控器外壳内的主板、设置在所述主板上的无线电发射装置,所述无线电发射装置可通过无线电与所述无线电信号接收装置相连。使用者可以通过遥控器控制本实用新型的各项活动。
36.其中,所述激光测距传感器222的型号为:dt50
‑
p1113;所述plc控制器的型号为:西门子plc1200。
37.以上所述的本实用新型实施方式,并不构成对本实用新型保护范围的限定。任何在本实用新型的精神和原则之内所作的修改、等同替换和改进等,均应包含在本实用新型的权利要求保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1