一种多轴运动机构的制作方法
1.本实用新型涉及自动化设备技术领域,特别涉及一种多轴运动机构。
背景技术:
2.传统的轴向运动配合中,用单一的配合运动,连贯性的作用在物体上,来达到某种运动方式。而传统的轴向运动具有一定的限制性,运动方式较为单一,无法完成复杂的配合运动。
3.因而现有技术还有待改进和提高。
技术实现要素:
4.鉴于上述现有技术的不足之处,本实用新型的目的在于提供一种多轴运动机构,旨在解决现有的轴向配合运动中运动方式较为单一的问题。
5.本实用新型解决技术问题所采用的技术方案如下:
6.本实用新型实施例提供了一种多轴运动机构,包括:固定架;与所述固定架连接、位于所述固定架的x轴方向上的第一运动部件;与所述第一运动部件的第一侧连接、位于所述第一运动部件的第一侧的x轴方向上的第二运动部件;与所述第二运动部件连接、位于所述第二运动部件的y轴方向上的第三运动部件;与所述第三运动部件连接、位于所述第三运动部件的z轴方向上的第四运动部件。
7.作为进一步的改进技术方案,所述的多轴运动机构中,所述固定架的x轴方向上开设有第一运动轨道,所述第一运动部件包括第一运动架和设置在所述第一运动轨道上的第一驱动电机以及设置在所述第一运动架上、与所述第一驱动电机连接的第一运动块。
8.作为进一步的改进技术方案,所述的多轴运动机构中,所述第一运动部件的第一侧的x轴方向上开设有第二运动轨道,所述第二运动部件包括第二运动架和设置在所述第二运动轨道上的第二驱动电机以及设置在所述第二运动架上、与所述第二驱动电机连接的第二运动块。
9.作为进一步的改进技术方案,所述的多轴运动机构中,所述第二运动部件的y轴方向上开设有第三运动轨道,所述第三运动部件包括第三运动架和设置在所述第三运动轨道上的第三驱动电机以及设置在所述第三运动架上、与所述第三驱动电机连接的第三运动块。
10.作为进一步的改进技术方案,所述的多轴运动机构中,所述第三运动部件的z轴方向上设置有运动杆,所述第四运动部件包括设置在所述运动杆上的第四运动块和设置在所述第三运动架上、与所述第四运动块连接的第四驱动电机。
11.作为进一步的改进技术方案,所述的多轴运动机构中,还包括与所述第一运动部件的第二侧连接、位于所述第一运动部件的第二侧的x轴方向上的第五运动部件;所述第一运动部件的第二侧的x轴方向上开设有第四运动轨道,所述第五运动部件包括第五运动架和设置在所述第五运动架上的第五驱动电机以及设置在所述第四运动轨道上、与所述第五
驱动电机连接的第五运动块。
12.作为进一步的改进技术方案,所述的多轴运动机构中,还包括与所述第四运动部件连接、位于所述第四运动部件的z轴方向上的第六运动部件;所述第六运动部件包括设置在所述第四运动块的z轴方向上的移动杆以及与所述移动杆连接的第六驱动电机。
13.作为进一步的改进技术方案,所述的多轴运动机构中,还包括设置在所述第一运动轨道的两端上的第一限位部。
14.作为进一步的改进技术方案,所述的多轴运动机构中,还包括设置在所述第二运动轨道的两端上的第二限位部。
15.作为进一步的改进技术方案,所述的多轴运动机构中,还包括设置在所述第三运动轨道的两端上的第三限位部。
16.与现有技术相比,本实用新型实施例具有以下优点:
17.本实用新型实施方式提供的多轴运动机构包括:固定架;与所述固定架连接、位于所述固定架的x轴方向上的第一运动部件;与所述第一运动部件的第一侧连接、位于所述第一运动部件的第一侧的x轴方向上的第二运动部件;与所述第二运动部件连接、位于所述第二运动部件的y轴方向上的第三运动部件;与所述第三运动部件连接、位于所述第三运动部件的z轴方向上的第四运动部件。本实用新型实施例中的多轴运动机构可实现在同一三维空间的x轴、y轴和z轴方向上的往返运动和配合运动,从而满足了更多的传动需求。
附图说明
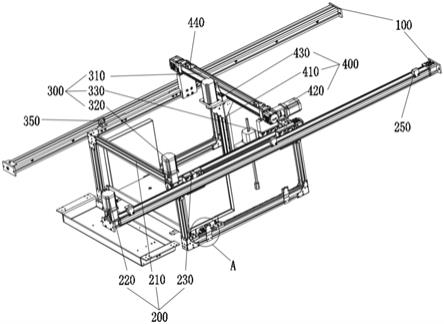
18.图1为本实用新型中的多轴运动机构的第一种爆照结构示意图;
19.图2为图1中a处的局部结构放大图;
20.图3为本实用新型中的多轴运动机构的结构示意图;
21.图4为图3中b处的局部结构放大图;
22.图5为本实用新型中的多轴运动机构的第二种爆照结构示意图;
23.图6为图5中c处的局部结构放大图;
24.图7为图5中d处的局部结构放大图;
25.图8为本实用新型中的多轴运动机构中的剖面结构示意图;
26.图9为图8中e处的局部结构放大图;
27.图10为图8中f处的局部结构放大图;
28.图11为图8中g处的局部结构放大图;
29.图12为图8中h处的局部结构放大图。
30.图中:100、固定架;200、第一运动部件;300、第二运动部件;400、第三运动部件;500、第四运动部件;210、第一运动架;220、第一驱动电机;230、第一运动块;111、第一主运动轨道;112、第一辅运动轨道;240、第一滑动块;250、第一限位部;310、第二运动架;320、第二驱动电机;330、第二运动块;261、第二主运动轨道;262、第二辅运动轨道;340、第二滑动块;350、第二限位部;360、第三运动轨道;410、第三运动架;420、第三驱动电机;430、第三运动块;440、第三限位部;450、运动杆;510、第四运动块;520、第四驱动电机;600、第五运动部件;610、第五运动架;620、第五驱动电机;630、第五运动块;271、第四主运动轨道;272、第四辅运动轨道;640、第五滑动块;700、第六运动部件;710、移动杆;720、第六驱动电机。
具体实施方式
31.为使本实用新型的目的、技术方案及效果更加清楚、明确,以下参照附图并举实施例对本实用新型进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
32.在实施方式和申请专利范围中,除非文中对于冠词有特别限定,否则“一”与“所述”可泛指单一个或复数个。
33.另外,若本实用新型实施例中有涉及“第一”、“第二”等的描述,则该“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本实用新型要求的保护范围之内。
34.本实用新型公开了一种多轴运动机构,请一并参阅图1至图12。所述多轴运动机构包括:固定架100;与所述固定架100连接、位于所述固定架100的x轴方向上的第一运动部件200;与所述第一运动部件200的第一侧连接、位于所述第一运动部件200的第一侧的x轴方向上的第二运动部件300;与所述第二运动部件300连接、位于所述第二运动部件300的y轴方向上的第三运动部件400;与所述第三运动部件400连接、位于所述第三运动部件400的z轴方向上的第四运动部件500。
35.在本实用新型实施例中,所述固定架100首尾两端的四个固定点需固定在同一水平面上。在实际使用时,所述多轴运动结构可应用于各种装置,例如,应用到取货装置中,结合图1说明,图中各个部件均位于固定架100的中间位置,若当待拾取的物品在固定架100端面的下方时,此时可驱动第一运动部件200在所述固定架100的x轴方向上移动,则第一运动部件移动至固定架100的端面;进一步地,再驱动设置在第一运动部件的x轴方向上的第二运动部件300在所述第一运动部件200的x轴方向上移动,从而移动到待拾取的物品的上方;进一步地,再驱动设置在第二运动部件的y轴方向上的第三运动部件400移动到待拾取的物品的上方;最后通过设置在第三运动部件400的z轴方向上的第四运动部件500拾取物品即可。因此本实用新型提供的多轴运动机构可实现同一三维空间内的x轴、y轴、z轴三个方向上的往复运动,相比较传统单一的轴向运动更能完成复杂的配合运动,并且各个运动部件之间的轴向运动互不影响,均可独立完成。更好的解决了较难的运动模式,满足了运动需求。
36.具体的,请参阅图8至图12,所述固定架100的x轴方向上开设有第一运动轨道,所述第一运动部件200包括第一运动架210和设置在所述第一运动轨道上的第一驱动电机220以及设置在所述第一运动架210上、与所述第一驱动电机220连接的第一运动块230。
37.在本实用新型实施例中,所述第一运动轨道分布在所述第一运动部件200的两侧,所述第一运动轨道包括第一主运动轨道111和第一辅运动轨道112,所述第一驱动电机220设置在第一主运动轨道111上,且第一主运动轨道111内设置有第一带轮组(图中未示出),所述第一运动块230位于所述第一运动架210的一侧,并通过所述第一带轮组和所述第一驱动电机220连接,所述第一运动架210通过所述第一运动块230活动设置在所述第一运动轨道上,进一步地,所述第一运动架210的第二侧上设置有第一滑动块240,所述第一滑动块
240与所述第一辅运动轨道112活动连接。可选的,所述第一运动块230和第一滑动块240内设置有滑块或滑轮;在第一运动部件200运动时,通过所述第一驱动电机220驱动第一带轮组,从而带动第一运动块230移动,进而带动第一运动架210在第一运动轨道上实现x轴方向上的直线往复运动。
38.其中,为了避免第一运动架210在运动过程中超过第一运动轨道的长度,在所述第一运动轨道的两端均设置有第一限位部250。
39.更具体的,所述第一运动部件200的第一侧的x轴方向上开设有第二运动轨道,所述第二运动部件300包括第二运动架310和设置在所述第二运动轨道上的第二驱动电机320以及设置在所述第二运动架310上、与所述第二驱动电机320连接的第二运动块330。
40.在本实用新型实施例中,所述第二运动轨道分布在所述第二运动部件300的两侧,所述第二运动轨道包括第二主运动轨道261和第二辅运动轨道262,所述第二驱动电机320设置在第二主运动轨道261上,且第二主运动轨道261内设置有第二带轮组(图中未示出),所述第二运动块330位于所述第二运动架310的一侧,并通过所述第二带轮组和所述第二驱动电机320连接,所述第二运动架310通过所述第二运动块330活动设置在所述第二运动轨道上,进一步地,所述第二运动架310的第二侧上设置有第二滑动块340,所述第二滑动块340与所述第二辅运动轨道262活动连接。可选的,所述第二运动块330和第二滑动块340内设置有滑块或滑轮;在第二运动部件运动时,通过所述第二驱动电机320驱动第二带轮组,从而带动第二运动块330移动,进而带动第二运动架310在第二运动轨道上实现x轴方向上的直线往复运动。
41.其中,为了避免第二运动架310在运动过程中超过第二运动轨道的长度,在所述第二运动轨道的两端均设置有第二限位部350。
42.进一步地,所述第二运动部件300的y轴方向上开设有第三运动轨道360,所述第三运动部件400包括第三运动架410和设置在所述第三运动轨道360上的第三驱动电机420以及设置在所述第三运动架410上、与所述第三驱动电机420连接的第三运动块430。
43.在本实用新型实施例中,所述第三驱动电机420设置在第三运动轨道360的一端上(即第二运动架310的一端),且第三运动轨道360内设置有第三带轮组(图中未示出),所述第三运动块430与所述第三运动架410连接,并通过所述第三带轮组和所述第三驱动电机420连接,所述第三运动架410通过所述第三运动块430活动设置在所述第三运动轨道360上。可选的,所述第三运动块430内设置有滑块或滑轮;在第三运动部件400运动时,通过所述第三驱动电机420驱动第三带轮组,从而带动第三运动块430移动,进而带动第三运动架410在第三运动轨道360上实现y轴方向上的直线往复运动。
44.其中,为了避免第三运动架410在运动过程中超过第三运动轨道360的长度,在所述第三运动轨道360的两端均设置有第三限位部440。
45.更进一步地,所述第三运动部件400的z轴方向上设置有运动杆450,所述第四运动部件500包括设置在所述运动杆450上的第四运动块510和设置在所述第三运动架410上、与所述第四运动块510连接的第四驱动电机520。
46.在本实用新型实施例中,所述运动杆450平行设置在所述第三运动架410上,且第三运动架410内设置有第四带轮组(图中未示出),所述第四运动块510通过所述第四带轮组和所述第四驱动电机520连接,所述第四运动块510活动设置在所述运动杆450上。在第四运
动部件500运动时,通过所述第四驱动电机520驱动第四带轮组,从而带动第四运动块510移动在运动杆450上实现z轴方向上的直线往复运动。
47.作为进一步地方案,所述多轴运动机构还包括与所述第一运动部件200的第二侧连接、位于所述第一运动部件200的第二侧的x轴方向上的第五运动部件600;所述第一运动部件200的第二侧的x轴方向上开设有第四运动轨道,所述第五运动部件600包括第五运动架610和设置在所述第五运动架上的第五驱动电机620以及设置在所述第四运动轨道上、与所述第五驱动电机620连接的第五运动块630。
48.在本实用新型实施例中,所述第四运动轨道分布在所述第五运动部件600的两侧,所述第四运动轨道包括第四主运动轨道271和第四辅运动轨道272,所述第五驱动电机620设置在第四主运动轨道271上,且第四主运动轨道271内设置有齿条(图中未示出),所述第五运动块630位于所述第五运动架610的一侧,并齿条啮合传动,所述第五运动架610通过所述第五运动块630活动设置在所述第四运动轨道上,进一步地,所述第五运动架610的第二侧上设置有第五滑动块640,所述第五滑动块640与所述第四辅运动轨道272活动连接。可选的,所述第五运动块630为齿轮,所述第四主运动轨道271为齿条,所述第五滑动块640内设置有滑块或滑轮;在第五运动部件600运动时,通过所述第五驱动电机620驱动第五带轮组,从而带动第五运动块630移动,进而带动第五运动架610在第五运动轨道上实现x轴方向上的直线往复运动。
49.作为更进一步地方案,还包括与所述第四运动部件500连接、位于所述第四运动部件500的z轴方向上的第六运动部件700;所述第六运动部件700包括设置在所述第四运动块510的z轴方向上的移动杆710以及与所述移动杆710连接的第六驱动电机720。
50.在本实用新型实施例中,所述第六驱动电机720设置在所述第四运动块510上,所述移动杆710垂直与所述第六驱动电机720连接,所述移动杆710与所述运动杆450平行设置,可选的,所述移动杆710为丝杆。在第六运动部件700运动时,通过所述第六驱动电机720驱动所述移动杆710上实现z轴方向上的直线往复运动。
51.下面对本实施例中的多轴运动机构的工作原理进行详细说明:
52.x轴方向的运动:通过所述第一驱动电机220驱动第一带轮组,从而带动第一运动块230移动,进而带动第一运动架210在第一运动轨道上实现x轴方向上的直线往复运动;
53.通过所述第二驱动电机320驱动第二带轮组,从而带动第二运动块330移动,进而带动第二运动架310在第二运动轨道上实现x轴方向上的直线往复运动;
54.通过所述第五驱动电机620驱动第五带轮组,从而带动第五运动块630移动,进而带动第五运动架610在第五运动轨道上实现x轴方向上的直线往复运动。
55.y轴方向的运动:通过所述第三驱动电机420驱动第三带轮组,从而带动第三运动块430移动,进而带动第三运动架410在第三运动轨道360上实现y轴方向上的直线往复运动。
56.z轴方向的运动:在第四运动部件运动时,通过所述第四驱动电机520驱动第四带轮组,从而带动第四运动块510移动在运动杆450上实现z轴方向上的直线往复运动;在第六运动部件700运动时,通过所述第六驱动电机720驱动所述移动杆710上实现z轴方向上的直线往复运动。
57.综上所述,本实用新型提供的多轴运动机构包括:固定架;与所述固定架连接、位
于所述固定架的x轴方向上的第一运动部件;与所述第一运动部件的第一侧连接、位于所述第一运动部件的第一侧的x轴方向上的第二运动部件;与所述第二运动部件连接、位于所述第二运动部件的y轴方向上的第三运动部件;与所述第三运动部件连接、位于所述第三运动部件的z轴方向上的第四运动部件。本实用新型实施例中的多轴运动机构可实现在同一三维空间的x轴、y轴和z轴方向上的往返运动和配合运动,从而满足了更多的传动需求。
58.本领域技术人员在考虑说明书及实践这里公开的实用新型后,将容易想到本实用新型的其它实施方案。本实用新型旨在涵盖本实用新型的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本实用新型的一般性原理并包括本公开未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本实用新型的真正范围和精神由权利要求所指出。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1