物料搬运系统的制作方法
1.本实用新型涉及仓储分拣输送设备技术领域,尤其涉及一种物料搬运系统。
背景技术:
2.智能仓储是现代智慧物流的核心技术之一,随着自动化仓储的迅速发展,适用于仓储的轨道运输系统随之产生,通过轨道运输系统能实现货物自动搬运,提高作业效率和仓库空间利用率。现有的轨道运输系统通常包括轨道以及小车,轨道具有行驶面,小车上设有用于导向的滚轮,小车通过滚轮在轨道的行驶面上行驶,为防止小车的滚轮脱离轨道,轨道的行驶面上设有垂直于行驶面的挡板,滚轮的轮面与挡板发生硬接触,从而保证小车的行驶方向。但是,由于挡板的高度较高,小车换向困难,使得小车的行驶路线通常只能为直线,可选择的路线较少,而降低挡板的高度,换向时会出现小车的滚轮卡在挡板上,小车整体被架空无法正常行驶的情况。
技术实现要素:
3.本实用新型针对上述问题,提出了一种物料搬运系统,结构简单,行驶顺利平稳,路线多样。
4.本实用新型采取的技术方案如下:本实用新型提供一种物料搬运系统,包括x轴轨道、y轴轨道以及搬运小车。x轴轨道设有第一行驶面。 y轴轨道设有第二行驶面,所述x轴轨道和所述y轴轨道位于同一水平面上,且所述y轴轨道垂直于所述x轴轨道,所述y轴轨道与所述x轴轨道之间形成有运动间隙,所述第二行驶面高于所述第一行驶面设置。搬运小车包括车体、设置于所述车体上的车轮以及用于所述搬运小车换向的换向机构,所述车轮上具有轮缘。其中,所述搬运小车沿所述x轴轨道行驶时,所述车轮的轮面与所述第一行驶面接触,且所述轮缘与x轴轨道的侧面接触,所述运动间隙的宽度w1不小于所述轮缘的厚度w2;所述搬运小车沿所述y轴轨道行驶时,所述车轮的轮面与所述第二行驶面接触,且所述轮缘与y轴轨道的侧面接触。
5.于本实用新型一实施例中,所述车轮包括第一车轮和第二车轮,所述车体设有相对应于所述x轴轨道设置的x轴方向侧以及相对应于所述y 轴轨道设置的y轴方向侧,所述第一车轮安装于所述车体的x轴方向侧,所述第二车轮安装于所述车体的y轴方向侧;所述换向机构为用于控制所述车轮抬起或放下的举升组件,所述举升组件连接所述第二车轮。
6.于本实用新型一实施例中,所述车体包括底板、安装块、活动杆以及安装板,所述安装块设于所述底板上,所述活动杆可转动地安装于所述安装块上,所述安装板的中部安装于所述活动杆上,所述第二车轮可转动地安装于所述安装板的一端;所述举升组件包括举升电机、举升臂以及举升杆,所述举升杆与所述安装板的另一端固定连接,所述举升臂的一端与所述举升电机的输出轴联接,所述举升臂的另一端与所述举升杆固定连接。
7.于本实用新型一实施例中,所述x轴轨道的数量和所述y轴轨道的数量均不少于两条,且所述x轴轨道之间相互平行,所述y轴轨道之间相互平行;所述y轴轨道包括多个y轨道
单元,所述多个y轨道单元沿 y轴方向有间隔地铺设,且相邻两个y轨道单元的间距大于所述x轴轨道的宽度,所述y轨道单元的端部与所述x轴轨道形成运动间隙。
8.于本实用新型一实施例中,所述y轨道单元的端部设有导向斜面。
9.于本实用新型一实施例中,所述物料搬运系统还包括连接件,所述连接件设于所述x轴轨道和所述y轴轨道的底部,并连接相邻两个y轨道单元。
10.于本实用新型一实施例中,所述车体包括矩形的底板,所述车轮成对设置于所述底板的两侧,所述车体两侧的车轮分别与相邻两条x轴轨道或相邻两条y轴轨道相配合移动。
11.于本实用新型一实施例中,所述轮缘位于所述车轮的一侧,且所述轮缘均位于车轮的靠近车体的一侧或远离车体的一侧。
12.于本实用新型一实施例中,所述第二行驶面高于所述第一行驶面形成高度差h1,所述轮缘的高度为h2,其中,h1=h2。
13.于本实用新型一实施例中,所述车轮包括主动轮和从动轮,所述主动轮和所述从动轮相互有间隔地设置于所述车体上,且所述主动轮与其对应的所述从动轮位于所述车体的同一侧,所述物料搬运系统还包括驱动电机,所述驱动电机与所述主动轮联接。
14.本实用新型的有益效果是:本实用新型提供的物料搬运系统,搬运小车能够在x轴轨道和y轴轨道上行驶,并且搬运小车能够通过换向机构换向,可选择的搬运路线多样。当搬运小车在x轴轨道上运动时,车轮的轮面与x轴轨道的第一行驶面接触,车轮的轮缘与x轴轨道相切,可以限制车轮往y轴方向的移动自由度,从而保证搬运小车能够沿x轴方向行驶,不发生偏转,其中,当车轮行驶过x轴轨道和y轴轨道的连接处时,由于运动间隙的宽度w1不小于轮缘的厚度w2,使得车轮能够顺利且平稳地通过此处,不会与y轴轨道发生干涉;当搬运小车在y轴轨道上运动时,车轮的轮面与y轴轨道的第二行驶面接触,车轮的轮缘与y轴轨道相切,可以限制车轮往x轴方向的移动自由度,从而保证搬运小车能够沿y轴方向行驶,不发生偏转,其中,当车轮行驶过x轴轨道和y轴轨道的连接处时,车轮的轮面暂时脱离y轴轨道,轮缘与x轴轨道的第一行驶面短暂接触,由于y轴轨道的第二行驶面高于x轴轨道的第一行驶面形成高度差h1,车轮的轮缘在此高度差的引导作用下,使得车轮能够通过此处。
附图说明
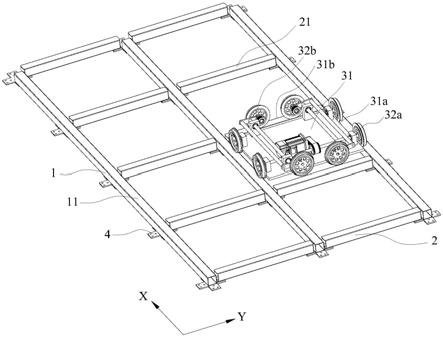
15.图1是本实用新型实施例的物料搬运系统的结构示意图;
16.图2是本实用新型实施例的搬运小车的结构示意图;
17.图3是本实用新型实施例的x轴轨道和y轴轨道的结构示意图;
18.图4是图3中a处的局部放大图;
19.图5是本实用新型实施例中车轮在x轴轨道上行驶时的结构示意图;
20.图6是本实用新型实施例中车轮在y轴轨道上行驶时的一个结构示意图;
21.图7是本实用新型实施例的车轮的结构示意图;
22.图8是本实用新型实施例中车轮在y轴轨道上行驶时的另一个结构示意图。
23.图中各附图标记为:1、x轴轨道;11、第一行驶面;2、y轴轨道; 21、第二行驶面;22、运动间隙;23、y轨道单元;231、导向斜面;3、搬运小车;31、车体;32、车轮;33、换向机构;321、轮缘;31a、x轴方向侧;31b、y轴方向侧;32a、第一车轮;32b、第二车轮;32c、主动轮;
32d、从动轮;311、底板;312、安装块;313、活动杆;314、安装板;331、举升电机;332、举升臂;333、举升杆;4、连接件;5、驱动电机;w1为运动间隙的宽度;w2为轮缘的厚度;h1为第二行驶面高于第一行驶面形成高度差;h2为轮缘的高度。
具体实施方式
24.下面结合各附图,通过具体实施例,对本实用新型进行详细、完整的描述。
25.请参考图1
‑
8所示,本实用新型提供一种物料搬运系统,包括x轴轨道1、y轴轨道2以及搬运小车3。x轴轨道1设有第一行驶面11。y轴轨道2设有第二行驶面21,x轴轨道1和y轴轨道2位于同一水平面上,且y轴轨道2垂直于x轴轨道1,y轴轨道2与x轴轨道1之间形成有运动间隙22,第二行驶面21高于第一行驶面11设置。搬运小车3包括车体31、设置于车体31上的车轮32以及用于搬运小车3换向的换向机构 33,车轮32上具有轮缘321。
26.其中,搬运小车3沿x轴轨道1行驶时,车轮32的轮面与第一行驶面11接触,且轮缘321与x轴轨道1的侧面接触,运动间隙22的宽度 w1不小于轮缘321的厚度w2;搬运小车3沿y轴轨道2行驶时,车轮 32的轮面与第二行驶面21接触,且轮缘321与y轴轨道2的侧面接触。运动间隙22由x轴轨道1和y轴轨道2之间有间隔地设置形成。车轮32 的轮面和轮缘321之间形成一定的角度,与轨道的行驶面和侧面形成的角度相适配。
27.具体地,搬运小车3能够在x轴轨道1和y轴轨道2上行驶,并且搬运小车3能够通过换向机构33换向,可选择的搬运路线多样。当搬运小车3在x轴轨道1上运动时,车轮32的轮面与x轴轨道1的第一行驶面11接触,车轮32的轮缘321与x轴轨道1相切,可以限制车轮32往 y轴方向的移动自由度,从而保证搬运小车3能够沿x轴方向行驶,不发生偏转,其中,当车轮32行驶过x轴轨道1和y轴轨道2的连接处时,由于运动间隙22的宽度w1不小于轮缘321的厚度w2,使得车轮32能够顺利且平稳地通过此处,不会与y轴轨道2发生干涉;当搬运小车3在y 轴轨道2上运动时,车轮32的轮面与y轴轨道2的第二行驶面21接触,车轮32的轮缘321与y轴轨道2相切,可以限制车轮32往x轴方向的移动自由度,从而保证搬运小车3能够沿y轴方向行驶,不发生偏转,其中,当车轮32行驶过x轴轨道1和y轴轨道2的连接处时,车轮32的轮面暂时脱离y轴轨道2,轮缘321与x轴轨道1的第一行驶面11短暂接触,由于y轴轨道2的第二行驶面21高于x轴轨道1的第一行驶面11 形成高度差h1,车轮32的轮缘321在此高度差的引导作用下,使得车轮 32能够通过此处。
28.请参考图1和图2所示,一实施例中,车轮32包括第一车轮32a和第二车轮32b,车体31设有相对应于x轴轨道1设置的x轴方向侧31a 以及相对应于y轴轨道2设置的y轴方向侧31b,第一车轮32a安装于车体31的x轴方向侧31a,第二车轮32b安装于车体31的y轴方向侧31b;换向机构33为用于控制车轮32抬起或放下的举升组件,举升组件连接第二车轮32b。
29.当搬运小车3需要沿x轴方向行驶时,举升组件控制第二车轮32b 抬起,第一车轮32a与x轴轨道1接触,通过第一车轮32a与x轴轨道1 配合沿x轴方向运动;当搬运小车3需要沿y轴方向行驶时,举升组件控制第二车轮32b放下,第一车轮32a被抬起,第二车轮32b与y轴轨道 2接触,通过第二车轮32b与y轴轨道2配合沿y轴方向运动。
30.请参考图2所示,一实施例中,车体31包括底板311、安装块312、活动杆313以及安装板314,安装块312设于底板311上,活动杆313可转动地安装于安装块312上,安装板314的中部安装于活动杆313上,第二车轮32b可转动地安装于安装板314的一端;举升组件包括举
升电机 331、举升臂332以及举升杆333,举升杆333与安装板314的另一端固定连接,举升臂332的一端与举升电机331的输出轴联接,举升臂332的另一端与举升杆333固定连接。
31.具体地,活动杆313在安装块312上转动,形成转动中心,举升电机 331驱动举升臂332拉动举升杆333运动,举升杆333连动安装板314的另一端绕着活动杆313的转动中心转动,进而联动安装板314一端上的第二车轮32b抬起或放下。其中,安装板314的中部并非安装板314的正中间的位置,而是安装板314两端之间的任意位置。
32.请参考图1和图3所示,一实施例中,x轴轨道1的数量和y轴轨道 2的数量均不少于两条,且x轴轨道1之间相互平行,y轴轨道2之间相互平行;y轴轨道2包括多个y轨道单元23,多个y轨道单元23沿y 轴方向有间隔地铺设,且相邻两个y轨道单元23的间距大于x轴轨道1 的宽度,y轨道单元23的端部与x轴轨道1形成运动间隙22。
33.请参考图3和图4所示,一实施例中,y轨道单元23的端部设有导向斜面231。车轮32往x轴方向运动经过x轴轨道1和y轴轨道2的连接处时,车轮32的轮缘321需要伸入到运动间隙22中,y轨道单元23 端部的导向斜面231对车轮32的轮缘321具有导向作用,使得轮缘321 能够顺利进入运动间隙22。
34.请参考图1和图3所示,一实施例中,物料搬运系统还包括连接件4,连接件4设于x轴轨道1和y轴轨道2的底部,并连接相邻两个y轨道单元23。x轴轨道1和y轴轨道2通过连接件4固定形成一体,不容易变形,能够保证轨道的整体结构,以方便搬运小车3的平稳顺利行驶。
35.请参考图1和图2所示,一实施例中,车体31包括矩形的底板311,车轮32成对设置于底板311的两侧,车体31两侧的车轮32分别与相邻两条x轴轨道1或相邻两条y轴轨道2相配合移动。
36.请参考图1和图7所示,一实施例中,轮缘321位于车轮32的一侧,且轮缘321均位于车轮32的靠近车体31的一侧或远离车体31的一侧。车轮32在轨道(x轴轨道1或y轴轨道2)上行驶时,轮缘321均位于轨道的内侧或者外侧,使得车轮32在沿x轴轨道1或y轴轨道2直线行驶时,在两侧车轮32的轮缘321作用下,搬运小车3不会脱出轨道。
37.请参考图1、图7和图8所示,一实施例中,第二行驶面21高于第一行驶面11形成高度差h1,轮缘321的高度为h2,h1=h2。当搬运小车3 往y轴方向运动时,由于第二行驶面21与第一行驶面11的高度差h1与轮缘321的高度h2相等,车轮32经过x轴轨道1和y轴轨道2的连接处不会有冲击和震动,有利于搬运小车3的平稳行驶。
38.一实施例中,车轮32包括主动轮32c和从动轮32d,主动轮32c和从动轮32d相互有间隔地设置于车体31上,且主动轮32c与其对应的从动轮32d位于车体31的同一侧,物料搬运系统还包括驱动电机5,驱动电机 5与主动轮32c联接。驱动电机5驱动主动轮32c移动,即可带动从动轮 32d移动,结构简单。此外,当搬运小车3往y轴方向运动至x轴轨道1 和y轴轨道2的连接处时,前侧的车轮32(主动轮32c或者从动轮32d) 脱离y轴轨道2时,后侧的车轮32仍与y轴轨道2接触,可以起到导向作用,防止搬运小车3脱离轨道。其中,前侧的车轮32可以为主动轮32c 或者从动轮32d,当前侧的车轮32为主动轮32c时,后侧的车轮32为从动轮32d;当前侧的车轮32为从动轮32d时,后侧的车轮32为主动轮32c。
39.以上仅为本实用新型的优选实施例,并非因此即限制本实用新型的专利保护范围,凡是运用本实用新型说明书及附图内容所作的等效结构变换,直接或间接运用在其他
相关的技术领域,均同理包括在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1