笔记本自动组装生产线的制作方法
1.本发明涉及笔记本外壳加工设备领域,具体涉及一种笔记本自动组装生产线。
背景技术:
2.笔记本电脑是人们日常生活及工作中常用的电子设备,因便于携带而被广泛使用。笔记本外壳在生产加工的过程中,通常需要在笔记本壳体上粘贴各种辅料,比如隔音防震用的泡棉或者衬垫,具有电磁波屏蔽作用的电泡棉或麦拉片等,这些辅料由于都是粘接到壳体上的,所以需要在一面覆胶和薄膜。现有技术中,笔记本组装企业,都是人工撕掉薄膜,然后手工将辅料粘贴到笔记本壳体上,这种生产方式劳动强度大且生产效率低。
技术实现要素:
3.有鉴于此,本发明提出一种笔记本自动组装生产线,以解决上述操作过程复杂,生产效率低,劳动强度大,投入劳动力大,粘贴精度低的问题。
4.为解决上述技术问题,本发明采取如下技术方案:
5.笔记本自动组装生产线,包括机架及设在所述机架上的自动剥料机构、机械手、生产线、自动下料机构和控制系统,所述自动剥料机构包括底座及设在所述底座上的支撑板,在所述底座上设有第一气缸,支架连接于所述第一气缸,在所述支架上设有第一滚筒,第二滚筒安装在所述支撑板上并与所述第一滚筒平行,第一电机通过第一皮带连接于所述第二滚筒,设在所述支撑板上端的是卷料料盘,设在所述卷料料盘侧下方的是导轮,在所述导轮的侧面设有剥料板,所述剥料板内设有负压腔,在所述剥料板表面设有气孔,所述气孔与所述负压腔贯穿,紧靠所述剥料板安装的是限位板,在所述限位板上设有光电开关;所述机械手设在所述生产线的侧面,在所述机械手上设有机械手指或第一负压吸盘;所述生产线为多条,在所述生产线的进料端设有导向轮,在所述生产线的末端设有侧挡机构和侧推定位机构;所述自动下料机构设在所述生产线的末端,包括设置在所述机架上的送料臂,安装在所述送料臂上的是第二电机,与所述第二电机相连的是第二皮带,固定在所述第二皮带上的是移料臂,设在所述移料臂上的是第四气缸,与所述第四气缸相连的是第二负压吸盘;所述控制系统包括plc。
6.所述控制系统包括plc。
7.优选地,所述生产线为皮带线。
8.优选地,所述第一滚筒上设有软质材料。
9.优选地,所述剥料板端面为三角形结构并靠近所述限位板,在所述剥料板的上端还设有调节挡条。
10.优选地,所述侧挡机构包括安装在所述机架上的第二气缸,侧挡块安装在所述第二气缸上。
11.优选地,所述侧推定位机构包括安装在所述机架上的第三气缸,定位块安装在所述第三气缸上。
12.与现有技术相比,本发明的有益效果为:
13.本发明笔记本自动组装生产线,采用自动剥料机构、机械手、生产线和自动下料机构构成的机械结构在plc的精准控制下实现对辅料的自动剥离和自动粘贴组装,组装后的笔记本壳体通过生产线自动送料到下一工位。本发明生产线为多条,自动剥料机构和机械手为多个,形成一个多工位操作的生产线,在生产线的末端设有自动下料机构,自动下料机构通过吸盘将组装完毕的笔记本壳体自动下料。整个生产线设计新颖、结构紧凑,工作效率高且精度高,能完全实现自动化。
附图说明
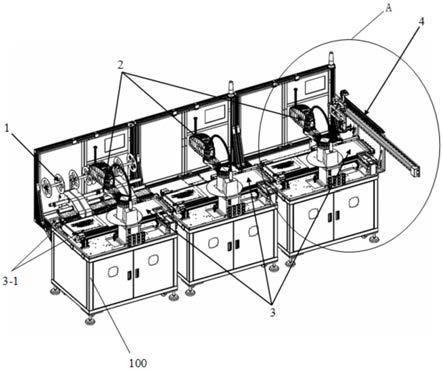
14.图1为本发明立体结构示意图;
15.图2为本发明a处局部放大结构示意图;
16.图3为本发明自动剥料机构立体结构示意图;
17.图4为本发明自动剥料机构主视结构示意图;
18.图5为本发明自动剥料机构b
‑
b处剖视结构示意图;
19.图6为本发明主视结构示意图;
20.图7为本发明左视结构示意图;
21.图8为本发明右视结构示意图;
22.图9为本发明俯视结构示意图。
具体实施方式
23.参见附图1
‑
9所示,笔记本自动组装生产线,包括机架100及设在所述机架100上的自动剥料机构1、机械手2、生产线3、自动下料机构4和控制系统,所述自动剥料机构包括底座1
‑
1及设在所述底座1
‑
1上的支撑板1
‑
2,在所述底座1
‑
1上设有第一气缸1
‑
3,支架1
‑
4连接于所述第一气缸1
‑
3,在所述支架1
‑
4上设有第一滚筒1
‑
5,第二滚筒1
‑
6安装在所述支撑板1
‑
2上并与所述第一滚筒1
‑
5平行,第一电机1
‑
7通过第一皮带1
‑
8连接于所述第二滚筒1
‑
6,设在所述支撑板1
‑
2上端的是卷料料盘1
‑
9,设在所述卷料料盘1
‑
9侧下方的是导轮1
‑
10,在所述导轮1
‑
10的侧面设有剥料板1
‑
11,所述剥料板1
‑
11内设有负压腔1
‑
12,在所述剥料板1
‑
11表面设有气孔1
‑
13,所述气孔1
‑
13与所述负压腔1
‑
12贯穿,紧靠所述剥料板1
‑
11安装的是限位板1
‑
14,在所述限位板1
‑
14上设有光电开关。优选地,所述第一滚筒1
‑
5上设有软质材料。优选地,所述剥料板1
‑
11端面为三角形结构1
‑
15并靠近所述限位板1
‑
14,在所述剥料板1
‑
11的上端还设有调节挡条1
‑
16。所述机械手2设在所述生产线3的侧面,在所述机械手2上设有机械手指或第一负压吸盘;所述生产线3为多条,在所述生产线3的进料端设有导向轮3
‑
1,在所述生产线3的末端设有侧挡机构3
‑
2和侧推定位机构3
‑
3;所述生产线3为皮带线;所述侧挡机构3
‑
2包括安装在所述机架100上的第二气缸3
‑2‑
1,侧挡块3
‑2‑
2安装在所述第二气缸3
‑2‑
1上。所述侧推定位机构3
‑
3包括安装在所述机架100上的第三气缸3
‑3‑
1,定位块3
‑3‑
2安装在所述第三气缸3
‑3‑
1上。所述自动下料机构4设在所述生产线3的末端,包括设置在所述机架100上的送料臂4
‑
1,安装在所述送料臂4
‑
1上的是第二电机4
‑
2,与所述第二电机4
‑
2相连的是第二皮带4
‑
3,固定在所述第二皮带4
‑
3上的是移料臂4
‑
4,设在所述移料臂4
‑
4上的是第四气缸4
‑
5,与所述第四气缸4
‑
5相连的是第二负压吸盘4
‑
6;所述
控制系统包括plc。设在所述移料臂4
‑
4上的是第二负压吸盘4
‑
5;所述控制系统包括plc。
24.本发明笔记本自动组装生产线,主要用于对笔记本电脑壳体上辅料的自动组装,使用时,首先将辅料卷料安装到卷料料盘1
‑
9上,并将辅料依次绕过导轮1
‑
10、剥料板1
‑
11、第一滚筒1
‑
5和第二滚筒1
‑
6的中间,当薄膜经过第一滚筒1
‑
5和第二滚筒1
‑
6位置时候,由气缸1
‑
3驱动与之相连的支架1
‑
4,并将安装在所述支架1
‑
4上的第一滚筒1
‑
5朝第二滚筒1
‑
6运动并挤压第二滚筒1
‑
6,由于在所述第一滚筒1
‑
5上设有软质材料,第一滚筒1
‑
5和第二滚筒1
‑
6即可实现对薄膜的紧紧夹持,当第一电机1
‑
7转动通过第一皮带1
‑
8带动与之相连的第二滚筒1
‑
6转动,夹持在所述第二滚筒1
‑
6与第一滚筒1
‑
5之间的薄膜持续送料,为确保送料的精度,本发明采用plc来控制,第一电机1
‑
7采用伺服电机或步进电机,当薄膜持续送料的过程中,粘贴在所述薄膜上的辅料会在剥料板1
‑
11与限位板1
‑
14间隙处发生剥离,为确保剥离效果,本发明采用带有负压腔1
‑
12的剥料板1
‑
11,并在剥料板1
‑
11表面设有气孔1
‑
13,气孔1
‑
13布局在三角形结构1
‑
15的形成夹角的两个面上,负压腔1
‑
12通过气管与负压泵连接后,薄膜将紧紧吸附在剥料板1
‑
11上,紧靠所述剥料板1
‑
11安装的是限位板1
‑
14,在所述限位板1
‑
14上设有光电开关,辅料在剥料板1
‑
11与限位板1
‑
14间隙位置即可发生剥离,剥离后的辅料位移是沿着朝限位板1
‑
14上移动,而薄膜会按照原路径移动,在所述限位板1
‑
14上设有光电开关,当辅料达到光电开关位置时,含有plc的控制系统会检测到,剥离后的辅料经过机械手2抓取后移动到生产线3位置。笔记本壳体是放置在生产线3移动,在生产线3的进料端设有导向轮3
‑
1能够对笔记本壳体位置进行导向,在所述生产线3末端的侧挡机构3
‑
2和侧推定位机构3
‑
3相结合能够对笔记本壳体位置的精准限位。限位原理为:侧挡机构3
‑
2包括安装在所述机架100上的第二气缸3
‑2‑
1,侧挡块3
‑2‑
2安装在所述第二气缸3
‑2‑
1上,第二气缸3
‑2‑
1启动带动与之相连的侧挡块3
‑2‑
2能够阻挡笔记本壳体在线体上的移动,而侧推定位机构3
‑
3包括安装在所述机架100上的第三气缸3
‑3‑
1,定位块3
‑3‑
2安装在所述第三气缸3
‑3‑
1上,第三气缸3
‑3‑
1的启动会带动与之相连的定位块3
‑3‑
2将笔记本壳体定位在侧挡块3
‑2‑
2位置完成限位。
25.机械手2上设有机械手指或吸盘,机械手指或吸盘将自动剥料机构1剥离后的辅料抓取或吸附后移位到生产线3的限位后的笔记本壳体上实施与辅料组装。当辅料与笔记本壳体组装后,侧挡机构3
‑
2和侧推定位机构3
‑
3的气缸复位,笔记本壳体在生产线3继续前行。依据笔记本粘贴辅料的数量及位置的需求,本发明生产线3可以为多条,自动剥料机构1和机械手2也可以多个,当笔记本壳体上辅料全部组装完毕后,在随后一条生产线3末端设有的自动下料机构4的移料臂4
‑
4通过第二负压吸盘4
‑
5将组装后的笔记本壳体件移位到下一工位。自动下料机构4的工作原理为:第二电机4
‑
2转动并带动与之相连的第二皮带4
‑
3转动,由于移料臂4
‑
4固定在所述第二皮带4
‑
3,移料臂4
‑
4会随第二皮带4
‑
3的转动而移动,设在所述移料臂4
‑
4上的是第四气缸4
‑
5,与所述第四气缸4
‑
5相连的是第二负压吸盘4
‑
6;第四气缸4
‑
5启动带动与之相连的第二负压吸盘4
‑
6下降并将生产线3上已组装后的笔记本壳体吸住,第四气缸4
‑
5复位,笔记本壳体上移,在第二电机4
‑
2的转动下送料到下一工位,即完成对笔记本壳体的自动组装。本发明机械手2为现有技术中常用的自由度为4或大于4的机械臂,本发明通过含有plc的控制系统精准控制,达到笔记本自动组装。
26.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可
以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1