一种大型压载模块对接装置的制作方法
1.本实用新型属于海洋机器人领域,具体地说是一种大型压载模块对接装置。
背景技术:
2.在海洋机器人上,通常安装有压载配重块,目的是为了实现抛载后回收海洋机器人。现有的中小型海洋机器人,压载配重块的重量较轻,装配也较为容易,根据安装位置的不同采用人工辅以吊车、液压千斤顶等进行安装,难度不大。而对于大型和超大型海洋机器人而言,压载模块的尺寸和重量均较大,可能达到吨级,而且,由于海上机器人结构紧凑,导致安装位置和空间受限,常规安装可抛压载的方法将难以实现,有必要设计专用的对接设备辅助安装。
技术实现要素:
3.针对上述问题,本实用新型的目的在于提供一种大型压载模块对接装置。
4.本实用新型的目的是通过以下技术方案来实现的:
5.一种大型压载模块对接装置,包括设有抛载机构的机器人外框架和与抛载机构相配合的压载模块,还包括电动平车与用于支撑机器人外框架的框架支撑座;
6.所述电动平车上设有支撑平台旋转机构,所述支撑平台旋转机构的输出端连接有支撑平台,所述支撑平台通过支撑平台旋转机构的驱动在所述电动平车上方水平旋转;
7.所述支撑平台上表面的左右两侧分别设有顶升油缸安装座,所述顶升油缸安装座上安装有顶升油缸,所述顶升油缸的上端设有压载模块支撑随形底座,所述顶升油缸安装座的两侧设有安装于所述支撑平台上表面、使压载模块支撑随形底座左右移动的横移油缸;
8.待安装的压载模块放置在所述压载模块支撑随形底座上,通过所述电动平车、支撑平台旋转机构、横移油缸及顶升油缸实现压载模块五个自由度的位姿调节。
9.所述支撑平台旋转机构包括推力轴承顶座、推力轴承底座、电机、减速机与传动主轴,所述推力轴承顶座与所述推力轴承底座上下对应设置在所述电动平车上,所述电机与减速机分别安装在所述推力轴承底座上,所述电机的输出端与所述减速机的输入端固定连接,所述减速机的输出端安装有齿轮a;所述推力轴承顶座与所述推力轴承底座之间安装有推力轴承,所述推力轴承与所述传动主轴转动连接,所述传动主轴的上端与所述支撑平台固定连接,所述传动主轴的下端设有齿轮b,所述齿轮b与所述齿轮a啮合;所述电机依次通过所述减速机、所述齿轮a、所述齿轮b与所述传动主轴带动所述支撑平台水平转动。
10.所述推力轴承底座上还设有导向套,所述传动主轴的中部穿过所述导向套。
11.所述压载模块支撑随形底座上分别设有压载模块端部限位座,压载模块放置在所述压载模块支撑随形底座上时,压载模块的左右两端分别由一个所述压载模块端部限位座限位。
12.所述支撑平台的左右两端设有粗定位孔,所述机器人外框架上与所述粗定位孔对
应的位置分别设有定位杆,所述定位杆插入对应的所述粗定位孔进行粗定位。
13.所述定位杆的轴向中心线与水平面相垂直。
14.所述压载模块上设有左右对称的精定位导向孔,所述机器人外框架上与所述精定位导向孔对应的位置分别设有精定位导向销,所述精定位导向销插入所述精定位导向孔进行精定位。
15.所述精定位导向销的轴向中心线与水平面相垂直。
16.所述压载模块左右两端分别设有斜向限位挡块,所述机器人外框架上与所述斜向限位挡块相对应的位置分别设有调整块。
17.所述压载模块上设有安全锁孔,所述机器人外框架上与所述安全锁孔对应的位置分别设有安全锁销;所述安全锁销能够穿过对应的所述安全锁孔并将所述压载模块与所述机器人外框架锁定。
18.本实用新型的优点与积极效果为:
19.1.本实用新型能够实现大尺寸重量规格的压载模块在小范围空间内的安装,节省人力、提高作业效率;
20.2.本实用新型能够实现五个自由度的位姿调节,对接精度高,安装过程快速,同时安全可靠;
21.3.本实用新型通用性强,通过更换压载模块支撑随形底座,能够适应不同尺寸的压载模块安装。
附图说明
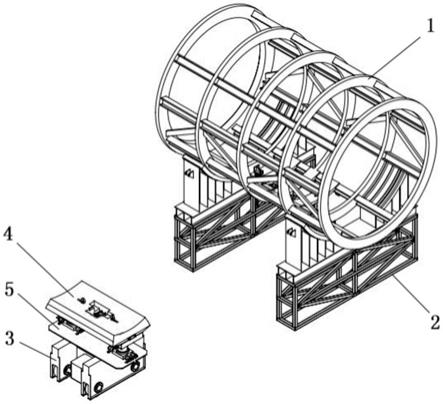
22.图1为本实用新型压载模块与机器人外框架对接前的整体结构示意图;
23.图2为本实用新型压载模块与机器人外框架对接时的整体结构示意图;
24.图3为本实用新型的电动平车与支撑平台构成的整体结构示意图;
25.图4为本实用新型的电动平车与支撑平台构成的整体的主视结构示意图;
26.图5为本实用新型的电动平车与支撑平台构成的整体的俯视结构示意图;
27.图6为本实用新型的支撑平台旋转机构结构示意图;
28.图7为本实用新型的机器人外框架的结构示意图;
29.图8为图7的a处放大图;
30.图9为本实用新型压载模块与机器人外框架连接时的压载模块的俯视结构示意图;
31.图10为压载模块与机器人外框架连接处的结构示意图。
32.图中:1
‑
机器人外框架、101
‑
定位杆、102
‑
精定位导向销、103
‑
调整块、104
‑
安全锁销、105
‑
抛载机构、2
‑
框架支撑座、3
‑
电动平车、4
‑
压载模块、401
‑
精定位导向孔、402
‑
斜向限位挡块、403
‑
安全锁孔、404
‑
铰接挂钩、5
‑
支撑平台、501
‑
粗定位孔、6
‑
顶升油缸安装座、7
‑
顶升油缸、8
‑
压载模块支撑随形底座、9
‑
横移油缸、10
‑
推力轴承顶座、11
‑
推力轴承底座、12
‑
电机、13
‑
减速机、14
‑
传动主轴、15
‑
齿轮a、16
‑
推力轴承、17
‑
齿轮b、18
‑
导向套、19
‑
压载模块端部限位座。
具体实施方式
33.下面结合附图1
‑
10对本实用新型作进一步详述。
34.一种大型压载模块对接装置,如图1和图2所示,包括设有抛载机构105的机器人外框架1和与抛载机构105相配合的压载模块4,还包括电动平车3与用于支撑机器人外框架1的框架支撑座2;本实施例中压载模块4与抛载机构105之间的连接采用现有技术,如图10所示,压载模块4上设有铰接挂钩404,铰接挂钩404可通过锁叉结构的抛载机构105锁住;本实施例中电动平车3采用现有技术的可通过无线遥控方式控制的电动平车3。
35.电动平车3上设有支撑平台旋转机构,支撑平台旋转机构的输出端连接有支撑平台5,支撑平台5通过支撑平台旋转机构的驱动在电动平车3上方水平旋转。
36.如图3
‑
5所示,支撑平台5上表面的左右两侧分别设有顶升油缸安装座6,顶升油缸安装座6上安装有顶升油缸7,顶升油缸7的上端设有压载模块支撑随形底座8,压载模块支撑随形底座8的上表面形状与压载模块4的外侧面形状相契合,左右两侧的顶升油缸7可分别对压载模块4进行抬升;顶升油缸安装座6的两侧设有安装于支撑平台5的上表面、使压载模块支撑随形底座8左右移动的横移油缸9;本实施例中顶升油缸7与横移油缸9分别与外接液压站连接,并由外接控制器分别控制动作,顶升油缸7与横移油缸9连接方式为现有技术。
37.机器人外框架1放置在框架支撑座2上,本实施例中设有两个框架支撑座2,待安装的压载模块4放置在压载模块支撑随形底座8上,通过电动平车3、支撑平台旋转机构、横移油缸9及顶升油缸7实现压载模块4五个自由度的位姿调节;其中,横移油缸9及顶升油缸7分别实现x方向和z方向的直线调节,电动平车3实现y方向的直线调节,支撑平台旋转机构实现绕z轴的旋转自由度调节,而通过两侧的顶升油缸7的非同步调节能够实现绕y轴的旋转自由度调节。
38.具体而言,如图6所示,支撑平台旋转机构包括推力轴承顶座10、推力轴承底座11、电机12、减速机13与传动主轴14,推力轴承顶座10与推力轴承底座11上下对应设置在电动平车3上,电机12与减速机13分别固定安装在推力轴承底座11上,电机12的输出端与减速机13的输入端固定连接,减速机13的输出端固定安装有齿轮a15;推力轴承顶座10与所述推力轴承底座11之间安装有推力轴承16,推力轴承16与传动主轴14转动连接,传动主轴14的上端与支撑平台5固定连接,传动主轴14的下端设有齿轮b17,齿轮b17与齿轮a15啮合;电机12依次通过减速机13、齿轮a15、齿轮b17与传动主轴14带动支撑平台5水平转动;本实施例中电机12由外接控制器控制动作,其连接方式为现有技术。
39.具体而言,推力轴承底座11上还设有导向套18,传动主轴14的中部穿过导向套18,传动主轴14可稳定在导向套18内侧转动。
40.具体而言,如图3
‑
5所示,压载模块支撑随形底座8上分别设有压载模块端部限位座19,压载模块4放置在压载模块支撑随形底座8上时,压载模块4的左右两端分别由一个压载模块端部限位座19限位。
41.具体而言,如图5、图7和图8所示,支撑平台5的左右两端设有粗定位孔501,机器人外框架1上与粗定位孔501对应的位置分别设有定位杆101,定位杆101的轴向中心线与水平面相垂直,定位杆101插入对应的粗定位孔501进行粗定位。
42.具体而言,如图8和图9所示,压载模块4上设有左右对称的精定位导向孔401,机器人外框架1上与精定位导向孔401对应的位置分别设有精定位导向销102,精定位导向销102
的轴向中心线与水平面相垂直,精定位导向销102插入精定位导向孔401进行精定位。
43.具体而言,如图8和图9所示,压载模块4左右两端分别设有斜向限位挡块402,机器人外框架1上与斜向限位挡块402相对应的位置分别设有调整块103。
44.具体而言,如图8和图9所示,压载模块4上设有安全锁孔403,机器人外框架1上与安全锁孔403对应的位置分别设有安全锁销104;安全锁销104能够穿过对应的安全锁孔403并将压载模块4与机器人外框架1锁定,安全锁销104的设置与机器人外框架1的连接方式采用现有技术;装配机器人时,通过安全锁销104将压载模块4与机器人外框架1锁定,以保证装配安全;机器人装配完成后拆去安全锁销104。
45.工作原理:
46.使用吊车将压载模块4吊装至压载模块支撑随形底座8上并对压载模块4进行位置限定;
47.启动电动平车3,通过无线遥控方式对电动平车3进行位置调节;首先,在x方向调节电动平车3的位置,使电动平车3能够进入两个框架支撑座2之间;其次,在y方向调节电动平车3的位置,使电动平车3进入机器人外框架1底部,通过支撑平台5上的粗定位孔501找正机器人外框架1上的定位杆101,完成压载模块4的粗定位;
48.使用顶升油缸7将压载模块4缓慢起升,期间观察精定位导向销102与压载模块4上的精定位导向孔401的位置。通过横移油缸9在x方向进行压载模块4安装位置的精确调节,同时通过支撑平台旋转机构和顶升油缸7进行z轴及y轴的角度调节,当精定位导向销102能够完全进入精定位导向孔401时,完成压载模块4的精定位;
49.使用顶升油缸7缓慢提升压载模块4,期间观察斜向限位挡块402与调整块103之间的垂直距离,当二者距离在压载模块4两端均较小时,本实施例中为小于5mm时,即可保证压载模块4的铰接挂钩404与抛载机构105完全结合锁住;再通过机器人外框架1上布置的调整块103对压载模块4进行限位调整,使压载模块4的自由度完全限定,至此完成压载模块4的安装;
50.压载模块4在安装后,需要使用安全锁销104对其进行锁定,保证人员在此区域装配作业时的安全性;在海洋机器人进行下水前,安全锁销104需拆除。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1