用于阀口袋供袋机的库位的制作方法
1.本实用新型涉及一种供袋设备,尤其是一种用于阀口袋供袋机的库位。
背景技术:
2.阀口袋作为目前被广泛应用于灌装包装袋,被广泛用于食用粉、化工粉末、化肥、合成材料、炸药、粮食、盐、矿物质等粉状或粒状的固体物料及柔性物品的包装。阀口袋由其顶部或底部进料,灌装料后成方形,运输方便、灌装效率高装。
3.现有的阀口袋通常直接叠放在设备平台上,由于阀口袋两端厚度大于中间部分的厚度,因此多个阀口袋叠放在一起时,会出现两头高、中间低的情况。当多个阀口袋叠放在一起时,可能会出现阀口袋滑落的情况,还会影响吸袋装置对于阀口袋高度信息的采集,可能会出现吸盘空吸的情况;有时还会出现一次吸多个阀口袋的现象,此时还需要人工拿下多余的袋子,影响工作效率。
技术实现要素:
4.为解决上述技术问题,本实用新型提出一种能够有助于吸袋装置吸袋,阀口袋中间不塌陷的,吸袋率高的用于阀口袋供袋机的库位。
5.本实用新型采用如下技术方案:
6.一种用于阀口袋供袋机的库位,包括库位,库位内部设置有压袋辊,库位底部设置有弧形支撑板,压袋辊通过压袋辊支架与库位连接。
7.与现有技术相比,本实用新型的有益效果是:
8.本实用新型能够防止库位叠放的阀口袋出现中间低两头高的情况,使得吸袋装置定位更准确,而且能够保证吸袋的准确度,不多吸,不空吸,提高工作效率,借助压袋辊可以使阀口袋的开口更好的打开,提高撑袋成功率。
9.进一步的,本实用新型采用的优选方案是:
10.库位为上、下开口的壳体结构,库位底部的两端分别设置有条形结构的限位板,两块限位板之间间隔设置有筋条,弧形支撑板安装在筋条上。
11.弧形支撑板的两个侧边上分别间隔设置有缺口,缺口内设置有弧形卡环,弧形支撑板通过卡环与筋条连接。
12.压袋辊支架在库位的两侧对称设置,且压袋辊支架分别与各自所在一侧的库位的侧壁铰接。
13.压袋辊支架上设置有弧形凸起。
14.两个压袋辊支架设置有加固杆。
附图说明
15.图1为本实用新型的结构示意图;
16.图2为图1的俯视图;
17.图3为图1的后视图;
18.图4为袋库后端库位的工作原理图;
19.图5为袋库前端库位的工作原理图;
20.图6为库位的结构示意图;
21.图7为图6的仰视图;
22.图8为弧形支撑板的结构示意图;
23.图9为图8的c
‑
c视图;
24.图10为压袋辊未放下时的结构示意图;
25.图11为吸袋装置和撑袋装置的结构示意图;
26.图12为图11的侧视图;
27.图13为图11的俯视图;
28.图14为套袋所用机械手的结构示意图;
29.图中:箱体1;气动马达2;托板3;十字托盘4;前十字轮盘4
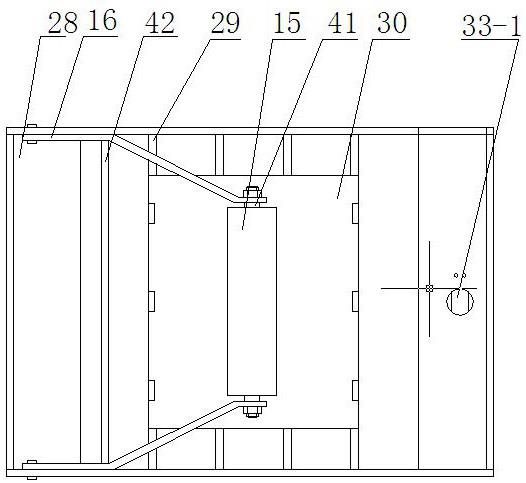
‑
1;前支臂一4
‑1‑
1;前支臂二4
‑1‑
2;前支臂三4
‑1‑
3;前支臂四4
‑1‑
4;后十字轮盘4
‑
2;后支臂一4
‑2‑
1;后支臂二4
‑2‑
2;后支臂三4
‑2‑
3;后支臂四4
‑2‑
4;库位5;库位一5
‑
1;库位二5
‑
2;库位三5
‑
3;库位四5
‑
4;固定架6;推进滑轨7;导向杆8;升降滑块9;连接杆10;竖杆10
‑
1;横杆10
‑
2;吸盘11;吸管11
‑
1;压紧弹簧11
‑
2;横移滑轨12;撑袋头13;固定座14;支撑架14
‑
1;压袋辊15;压袋辊支架16;弧形凸起16
‑
1;同步带17;压带轮18;推进气缸19;固定板20;升降气缸21;推进滑块22;气动刹车23;刹车盘24;限位盘25;限位片25
‑
1;行程开关26;驱动轮27;前驱动轮27
‑
1;后驱动轮27
‑
2;限位板28;筋条29;弧形支撑板30;卡环31;高度传感器32;光电传感器33;受光器33
‑
1;固定块34;滑板35;连接板36;推进杆37;旋转轴38;同步带轮39;固定轴40;压袋滚轴41;加固杆42;斜撑43;编程器44;减速机45。
具体实施方式
30.以下结合附图和具体实施例对本实用新型进一步说明。
31.一种用于阀口袋套袋的供袋机,主要由袋库、吸袋装置和撑袋装置组成,吸袋装置和撑袋装置通过u形托板3与箱体1连接,为了使托板3与箱体1之间连接更牢固,在托板3与箱体1之间增加斜撑43进行支撑。
32.袋库主要由箱体1和库位5组成,箱体1的前后侧板之间设置有贯穿箱体1的旋转轴38,旋转轴38的两端分别套装有一个驱动轮27(箱体1前端的驱动轮为前驱动轮27
‑
1,箱体1后端的驱动轮为后驱动轮27
‑
2轮),两个驱动轮27分别置于箱体1内部并分别与其坐在的箱体1内壁固定连接。旋转轴38的两端对称套装有一个十字托盘4,即置于箱体1前端的为前十字轮盘4
‑
1,置于箱体1后端的为后十字轮盘4
‑
2,且两个十字轮盘4对称置于两个驱动轮27之间。
33.每个十字轮盘4分别设置有四个支臂(前十字轮盘4
‑
1的支臂分别为前支臂一4
‑1‑
1、前支臂二4
‑1‑
2、前支臂三4
‑1‑
3和前支臂四4
‑1‑
4,后十字轮盘4
‑
2的支臂分别为后支臂一4
‑2‑
1、后支臂二4
‑2‑
2、后支臂三4
‑2‑
3和后支臂四4
‑2‑
4),前十字轮盘4
‑
1与后十字轮盘4
‑
2相对称位置的支臂之间分别安装有库位5(即前支臂一4
‑1‑
1与后支臂一4
‑2‑
1之间安装有库位一5
‑
1,前支臂二4
‑1‑
2与后支臂二4
‑2‑
2之间安装有库位二5
‑
2,前支臂三4
‑1‑
3和后
支臂三4
‑2‑
3之间安装有库位三5
‑
3,前支臂四4
‑1‑
4和后支臂四4
‑2‑
4之间安装有库位四5
‑
4)。
34.每个库位5的前、后侧板上分别设置有固定轴40,固定轴40通过轴承与各自所对应一侧的支臂连接,支臂与其相连接的库位铰接。其中库位一5
‑
1和库位二5
‑
2后端的固定轴40分别向各自所在一侧支臂的外侧延伸,且延伸端分别安装有一个同步带轮39,如图4所示,同步带17的内周带齿一侧依次绕过后支臂一4
‑2‑
1外侧的同步带轮39、后驱动轮27
‑
2以及后支臂二4
‑2‑
2外侧的同步带轮39,同步带17的外周不带齿一侧通过后十字轮盘4
‑
2上设置的压带轮18压紧。如图5所示,库位三5
‑
3和库位四5
‑
4前端的固定轴40分别向各自所在一侧的支臂的外侧延伸,且每个固定轴40的延伸端分别安装一个同步带轮39,同步带17的内周带齿一侧依次绕过前支臂三4
‑1‑
3外侧的同步带轮39、前驱动轮27
‑
1以及前支臂四4
‑1‑
4外侧的同步带轮39,同步带17的外周不带齿一侧通过前十字轮盘4
‑
1上设置的压带轮18压紧。
35.库位5为上下开口的壳体结构,库位5的底部两端分别设置有条形限位板28,两块限位板28之间间隔设置有筋条29,筋条29上设置有弧形支撑板30。每个库位5的左右两侧对称设置一个压袋辊支架16,压袋辊支架16分别销轴与各自对应的库位5侧壁铰接,两个压袋辊支架16之间设置有压袋滚轴41,压袋滚轴41上套装有压袋辊15,压袋滚轴41的两端分别与各自对应的压袋辊支架16螺栓连接。
36.为了使两个压袋辊支架16更加稳固,在压袋辊支架16之间加装加固杆42,加固杆42的两端分别与其对应的压袋辊支架16焊接。
37.压袋辊支架16上设置有弧形凸起16
‑
1,当工人忘记放下压袋辊15时,十字轮盘4在旋转过程中,支臂沿弧形凸起的切线方向下落的同时挤压靠近旋转轴38一侧的压袋辊支架16,使得压袋辊支架16下落,以防止因压袋辊15未及时放下造成生产设备损坏。
38.弧形支撑板30的弧面向上凸出,弧形支撑板30的前、后侧边上分别间隔设置有若干个缺口,每个缺口内对应设置有一个弧形卡环31,弧形支撑板30通过卡环31与筋条29连接。
39.如图1、3所示,旋转轴38的后端通过减速机45与箱体1外的气动马达2连接;旋转轴38的前端伸出箱体1外侧,且旋转轴38的前端设置有制动机构,制动机构由刹车盘24和限位盘25等组成,刹车盘24与旋转轴38固定连接,箱体1上设置有与刹车盘24连接的气动刹车23;刹车盘24的外侧设置有限位盘25,限位盘25套装在旋转轴38上且限位盘25与刹车盘24固定连接,限位盘25的外圆上对应十字托盘4的支臂设置有限位片25
‑
1,限位片25
‑
1与支臂一一对应,箱体上设置有行程开关26,限位片25
‑
1与行程开关26接触,旋转轴38停止转动,本实施例中,限位片25
‑
1设置有四个,每个限位片25
‑
1分别对应一个支臂,当旋转轴38转动四分之一圆周时,限位片25
‑
1与行程开关26接触,气动刹车23制动,气动刹车23通过控制刹车盘24使旋转轴38停止转动,同时气动马达2停止转动。
40.吸袋装置由固定架6、升降气缸21、吸盘11以及推进气缸19等组成,固定架6底部通过螺栓固定在托板3上,固定架6的上部沿平行于旋转轴38轴线方向设置有一块固定板20,固定板20远离固定架6一端的端头设置有光电传感器33,固定板20的右侧设置有推进气缸19,推进气缸19的缸体固定在固定架6上,推进气缸19的活塞杆上固定安装有推进杆37;固定板20的中部设置成中空结构,固定板20左侧安装有推进滑轨7,推进滑轨7通过其上安装
的推进滑块22与滑板35连接,推进杆37穿过固定板20的中空结构与滑板35的右侧面固定连接;升降气缸21的缸体固定安装在滑板35的左侧面上,升降气缸21的活塞杆的端头设置有固定块34,升降气缸21的两侧对称设置有导向杆8,导向杆8的底部都通过固定块34与升降气缸21的活塞杆连接成一个整体,导向杆8的中部分别通过升降滑块9与滑板35连接,两根导向杆8的顶部通过u形的连接板36形成一个整体,导向杆8随升降气缸21的活塞杆进行升降运动。
41.固定块34的下方设置有连接杆10,连接杆10的竖杆10
‑
1与固定块34螺栓连接,连接杆10的横杆10
‑
2与竖杆10
‑
1螺栓连接,横杆10
‑
2上间隔设置有三个吸盘11,吸盘11通过吸管11
‑
1与横杆10
‑
2固定连接,吸管11
‑
1与吸盘气缸连接,吸管11
‑
1上套装有压紧弹簧11
‑
2,横杆10
‑
2的右端安装有高度传感器32,通过高度传感器32采集吸盘距袋库中阀口袋的距离,确定下降高度。
42.撑袋装置由撑袋头13和横移滑轨12等组成,横移滑轨12置于箱体1的前端,且横移滑轨12通过螺栓固定在托板3上,横移滑轨12通过其表面上固定安装的横移滑块与固定座14连接,固定座14上设置有支撑架14
‑
1,支撑架14
‑
1上设置有撑袋头13,撑袋头13的右端为鸭嘴型结构,撑袋头13的左端固定设置有螺杆,撑袋头13通过螺母固定在支撑架14
‑
1上。
43.本装置在应用时,推进气缸19上设置有一个磁性开关,推进气缸19将滑板35推出至推进滑轨7的最后端时,发出信号给编程器44,编程器44发出下降指令,升降气缸21开始下降,同时高度传感器32采集高度信息(高度传感器32检测与库位5内最上层阀口袋上表面的距离),确定升降气缸21的下降高度,当升降气缸21的活塞杆下降到指定位置(即吸盘接触到库位5内最上层阀口袋的上表面),升降气缸21停止下降,同时编程器44发出吸袋指令,控制吸盘11吸住阀口袋,同时升降气缸21上升,此时阀口袋张开,编程器44发出横移指令,使撑袋头13向右滑移并插进阀口袋的开口内,吸盘11沿推进滑轨7退回至初始位置,然后机械手夹袋,撑袋头13退回至初始位置,机械手夹袋上行进行套袋工作,同时吸袋装置和取袋装置继续按照上述步骤进行循环工作。
44.当库位一5
‑
1的限位板28上安装有光电传感器33的受光器33
‑
1(如图6、7所示,受光器33
‑
1安装在靠近刹车盘24一侧的限位板28上),当光电传感器33的接收感应器接收到光线信号后,此时库位一5
‑
1无阀口袋,编程器44控制气动马达2使得旋转轴38转动,当限位盘25外圆的限位片25
‑
1与行程开关26接触时,气动刹车23启动,在气动刹车23和刹车盘24的作用下,旋转轴38停止转动,同时气动马达停止工作,此时装满有阀口袋的库位二5
‑
2正好转至吸盘11下方,库位二5
‑
2开始向吸袋装置供袋,同时人工将库位一内的阀口袋补满即可,以此类推。
45.本实施例中,编程器44与气源处理器连接,气动马达2、气动刹车23、升降气缸21、推进气缸19以及吸盘气缸等分别与气源处理器连接,为了使气源处理器的气体更加稳定,在气源处理器与电气元件之间增加用于稳定气压的气罐。
46.本实施例中电气元件分别采用市售产品,气动马达为欧旭机械的活塞式气动马达,型号为qmh050a
‑
f200;减速机为涡轮减速机,型号为rv90,品牌为冀桥星;气动刹车型号为dbf
‑
l10
‑
50;气源处理器型号为rhe af4000
‑
04,品牌为山瑞斯;横移滑轨型号为lgb8
‑
l
‑
4,品牌为启利自动化;吸盘为行程155mm,杆粗φ12 mm,吸盘接触面φ32mm,品牌为smc;推进滑轨型号为lgb8
‑
s
‑
4,品牌为启利自动化;升降气缸型号为mgclb32
‑
500r,品牌为smc;推
进气缸型号为mal32x200
‑
s
‑
ca,品牌为smc;光电传感器型号为e3f
‑
r2nk,品牌为浙江沪工;高度传感器型号为e3fa
‑
dn13
‑
npn,品牌为中姆龙;磁性开关型号cs1
‑
f,品牌为亚德客。
47.本实用新型在保证正常工作的前提下,可以直接对空库位进行补袋,补袋时不需停机,提高了作业的连贯性,降低了工人的劳动强度,提高了工作效率,而且借助压袋辊15可以使阀口袋的开口更好的打开。
48.以上仅为本实用新型的具体实施方式,但对本实用新型的保护并不局限于此,所有涉及本技术领域技术人员所能想到的对本技术方案技术特征提出的等效变化或替换,都包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1