一种盘胚用翻转装置的制作方法
1.本实用新型属于陶瓷制品制造技术领域,具体涉及一种盘胚用翻转装置。
背景技术:
2.陶瓷材料是用天然或合成化合物经过成形和高温烧结制成的一类无机非金属材料,具有高熔点、高硬度、高耐磨性、耐氧化等优点,因此以陶瓷材料为原料所制的陶瓷餐具需求量日益增加,它包括由粘土或含有粘土的混合物经混炼,成形,煅烧而制成的各种制品,随着人们生活水平的提高,人们对陶瓷餐具的质量要求增加,为提高陶瓷餐具的质量,煅烧工艺的提高尤为重要,而现有技术存在陶瓷餐具的盘胚在煅烧过程中受热不均匀的现象。
技术实现要素:
3.因此,为克服上述技术问题,本实用新型提供一种盘胚用翻转装置,包括控制器、水平驱动机构、竖直驱动机构、提取机构、旋转驱动机构和固定机构,所述竖直驱动机构连接于所述水平驱动机构的输出端,所述提取机构连接于所述竖直驱动机构的输出端,所述固定机构连接于所述旋转驱动机构的输出端,所述控制器与所述水平驱动机构、竖直驱动机构、旋转驱动机构和固定机构电性连接。
4.竖直驱动机构可为现有技术的气缸,水平驱动机构可为现有技术的电机水平驱动机构。
5.进一步地,所述提取机构包括第一吸取机构,所述吸取机构可为现有技术的普通吸盘、电控吸盘或气控吸盘。第一吸取机构能直接作用于被翻转物体的上表面,而无需对被翻转物体进行夹持,特别是生产过程中的陶瓷制品较为脆弱,若通过夹取式的夹具来作为提取机构,则容易导致陶瓷制品破损。
6.进一步地,所述旋转驱动机构包括电机。电机为现有技术,技术成熟,提取方便。
7.进一步地,所述固定机构包括转动杆和第二吸取机构,所述第二吸取机构连接于所述转动杆,所述第二吸取机构与所述控制器电性连接。转动杆的设置可使第二吸取机构直接位于被翻转物体的正下方,第二吸取机构能直接作用于被翻转物体的下表面,而无需对被翻转物体进行夹持,特别是生产过程中的陶瓷制品较为脆弱,若通过夹取式的夹具来作为固定机构来固定陶瓷制品的侧面,则夹紧作用力容易导致陶瓷制品破损。
8.进一步地,所述第二吸取机构通过连接杆连接于所述转动杆。若第二吸取机构直接连接于转动杆,则转动杆需要位于被放置平面的正上方才能实现第二吸取机构旋转后使被翻转物体到达被放置平面的上方,其为使被翻转物体能顺利180
°
翻转,则完成翻转的物体必定会腾空于被放置平面的上方,直接将物体放落可能会导致物体受损,将所述第二吸取机构通过连接杆连接于所述转动杆可使转动杆设置于被放置平面的侧边,如此设置可使被翻转物体在转动杆转动后直接到达被放置平面的上表面。
9.进一步地,所述连接杆为c型结构,所述c型结构的开口朝向转动方向。当需要提取
重量更大的被翻转物体时,通常需要更换吸取力更大的第二吸取机构,吸取力更大的如吸盘等第二吸取机构通常体积更大,高度更高,将连接杆设为c型结构,可在保证被翻转物体被第二提取机构提取时所处高度不变的情况下,通过改变c型机构在与第二吸取机构连接的一端的竖直长度,实现对不同高度的第二提取机构的容纳。
10.进一步地,还包括传感器和警报器,所述传感器的检测端位于所述提取机构和所述固定机构的衔接位置,所述传感器的输出端连接于所述控制器的输入端,所述控制器的输出端连接于所述警报器。该传感器可以采用现有技术的光电传感器,当第一吸取机构吸取物体失败时,在第一吸取机构到达与第二吸取机构的衔接位置后,此时传感器未感应到检测端范围内有被翻转物体,将此信号传输至控制器后控制器控制报警器工作。
11.本实用新型的有益效果是:在竖直驱动机构驱动和水平驱动机构的驱动作用下,第一吸取机构可吸取如陶瓷餐具等被翻转物体并将起从一放置平面转运至第二吸取机构,第二吸取机构吸取被翻转物体后并驱动被翻转物体沿旋转驱动机构的输出端为轴转动180
°
,使被翻转物体的原本朝上的表面在翻转后朝下,此时被翻转物体可在被第二吸取机构松开后被转运至另一放置平面,将该翻转装置使盘胚在烘烤设备能完成翻转,使其两面均匀受热,可提高盘胚受热的均匀度。
附图说明
12.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
13.图1为实施例1的结构示意图;
14.图2为实施例2在进行翻转前的结构示意图;
15.图3为实施例2在完成翻转后的结构示意图;
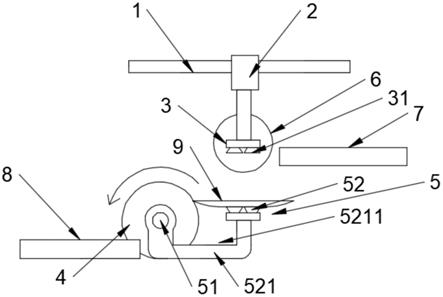
16.其中,1、水平驱动机构;2、竖直驱动机构;3、提取机构;4、旋转驱动机构;5、固定机构;31、第一吸取机构;41、电机;51、转动杆;52、第二吸取机构;521、连接杆;5211、开口朝向;6、传感器的检测端;7、第一传送带;8、第二传送带;9、被翻转物体。
具体实施方式
17.下面将对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
18.下面将结合附图来描述本实用新型的具体实施方式。
19.实施例1:
20.图1示出了本实用新型提供的图1示出了本实用新型提供的一种盘胚用翻转装置,包括控制器、水平驱动机构1、竖直驱动机构2、提取机构3、旋转驱动机构4和固定机构5,竖直驱动机构2连接于水平驱动机构1的输出端,提取机构3连接于竖直驱动机构2的输出端,固定机构5连接于旋转驱动机构4的输出端,控制器与水平驱动机构1、竖直驱动机构2、旋转
驱动机构4和固定机构5电性连接。
21.提取机构3包括第一吸取机构31,第一吸取机构31可为现有技术的普通吸盘、电控吸盘或气控吸盘。第一吸取机构31能直接作用于被翻转物体9的上表面,而无需对被翻转物体9进行夹持,特别是生产过程中的陶瓷制品较为脆弱,若通过夹取式的夹具来作为提取机构3,则容易导致陶瓷制品破损。
22.旋转驱动机构4包括电机41。电机41为现有技术,技术成熟,提取方便。
23.固定机构5包括转动杆51和第二吸取机构52,第二吸取机构52连接于转动杆51,第二吸取机构52与控制器电性连接。转动杆51的设置可使第二吸取机构52直接位于被翻转物体9的正下方,第二吸取机构52能直接作用于被翻转物体9的下表面,而无需对被翻转物体9进行夹持,特别是生产过程中的陶瓷制品较为脆弱,若通过夹取式的夹具来作为固定机构5来固定陶瓷制品的侧面,则夹紧作用力容易导致陶瓷制品破损。
24.还包括传感器和警报器,传感器的检测端6位于提取机构3和固定机构5的衔接位置,传感器的输出端连接于控制器的输入端,控制器的输出端连接于警报器。该传感器可以采用现有技术的光电传感器,当第一吸取机构31吸取物体失败时,在第一吸取机构31到达与第二吸取机构52的衔接位置后,此时传感器未感应到检测端范围内有被翻转物体9,将此信号传输至控制器后控制器控制报警器工作。
25.工作原理:第一传送带7的被翻转物体9运送至第一吸取机构31的下方时,竖直驱动机构2驱动第一吸取机构31向下运动,第一吸取机构31接触被翻转物体9并吸取被翻转物体9,竖直驱动机构2向上驱动第一吸取机构31,水平驱动机构1驱动竖直驱动机构2向左运动,竖直驱动机构2驱动第一吸取机构31向下运动,第二吸取机构52接触并吸取被翻转物体9,第一吸取机构31被竖直驱动机构2向上驱动并松开被翻转物体9,旋转驱动机构4驱动被翻转物体9沿旋转驱动机构4的输出端为轴转动180
°
,原本朝上的表面在翻转后朝下,此时被翻转物体9可在被第二吸取机构52松开后被送至位于旋转驱动机构4下方的第二传送带8。
26.实施例2:
27.图2
‑
图3示出了本实用新型提供的另图1示出了本实用新型提供的一种盘胚用翻转装置,包括控制器、水平驱动机构1、竖直驱动机构2、提取机构3、旋转驱动机构4和固定机构5,竖直驱动机构2连接于水平驱动机构1的输出端,提取机构3连接于竖直驱动机构2的输出端,固定机构5连接于旋转驱动机构4的输出端,控制器与水平驱动机构1、竖直驱动机构2、旋转驱动机构4和固定机构5电性连接。
28.提取机构3包括第一吸取机构31,第一吸取机构31可为现有技术的普通吸盘、电控吸盘或气控吸盘。第一吸取机构31能直接作用于被翻转物体9的上表面,而无需对被翻转物体9进行夹持,特别是生产过程中的陶瓷制品较为脆弱,若通过夹取式的夹具来作为提取机构3,则容易导致陶瓷制品破损。
29.旋转驱动机构4包括电机41。电机41为现有技术,技术成熟,提取方便。
30.固定机构5包括转动杆51和第二吸取机构52,第二吸取机构52连接于转动杆51,第二吸取机构52与控制器电性连接。转动杆51的设置可使第二吸取机构52直接位于被翻转物体9的正下方,第二吸取机构52能直接作用于被翻转物体9的下表面,而无需对被翻转物体9进行夹持,特别是生产过程中的陶瓷制品较为脆弱,若通过夹取式的夹具来作为固定机构5
来固定陶瓷制品的侧面,则夹紧作用力容易导致陶瓷制品破损。
31.第二吸取机构52通过连接杆521连接于转动杆51。若第二吸取机构52直接连接于转动杆51,则转动杆51需要位于被放置平面的正上方才能实现第二吸取机构52旋转后使被翻转物体9到达第二传送带的上方,其为使被翻转物体9能顺利180
°
翻转,则完成翻转的物体必定会腾空于第二传送带的上方,直接将物体放落可能会导致物体受损,将第二吸取机构52通过连接杆521连接于转动杆51可使转动杆51设置于被放置平面的侧边,如此设置可使被翻转物体9在转动杆51转动后直接到达第二传送带的上表面
32.连接杆521为c型结构,c型结构的开口朝向5211转动方向。当需要提取重量更大的被翻转物体9时,通常需要更换吸取力更大的第二吸取机构52,吸取力更大的如吸盘等第二吸取机构52通常体积更大,高度更高,将连接杆521设为c型结构,可在保证被翻转物体9被第二提取机构3提取时所处高度不变的情况下,通过改变c型机构在与第二吸取机构52连接的一端的竖直长度,实现对不同高度的第二提取机构3的容纳。
33.还包括传感器和警报器,传感器的检测端6位于提取机构3和固定机构5的衔接位置,传感器的输出端连接于控制器的输入端,控制器的输出端连接于警报器。该传感器可以采用现有技术的光电传感器,当第一吸取机构31吸取物体失败时,在第一吸取机构31到达与第二吸取机构52的衔接位置后,此时传感器未感应到检测端范围内有被翻转物体9,将此信号传输至控制器后控制器控制报警器工作。
34.工作原理:第一传送带7的被翻转物体9运送至第一吸取机构31的下方时,竖直驱动机构2驱动第一吸取机构31向下运动,第一吸取机构31接触被翻转物体9并吸取被翻转物体9,竖直驱动机构2向上驱动第一吸取机构31,水平驱动机构1驱动竖直驱动机构2向左运动,竖直驱动机构2驱动第一吸取机构31向下运动,第二吸取机构52接触并吸取被翻转物体9,第一吸取机构31被竖直驱动机构2向上驱动并松开被翻转物体9,旋转驱动机构4驱动被翻转物体9沿旋转驱动机构4的输出端为轴转动180
°
,此时被翻转物体9可在被第二吸取机构52松开后被送至第二传送带8,同时原本朝上的表面在翻转后朝下。
35.需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“上”、“下”、“左”、“右”以及类似的表述只是为了说明的目的。
36.以上内容是结合具体的优选实施方式对本实用新型所作的进一步详细说明,不能认定本实用新型的具体实施只局限于这些说明。对于本实用新型所属技术领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出简单推演或替换,都应当视为属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1