起重机、起重机主体及移动体的制作方法
1.本发明涉及一种起重机、起重机主体及移动体。
背景技术:
2.有一种为了确保施工机械的良好的视野而通过与该施工机械独立地移动的移动体来获取施工机械周围的图像的技术(例如,参考专利文献1)。
3.以往技术文献
4.专利文献
5.专利文献1:日本特开2018
‑
188250号公报
技术实现要素:
6.发明要解决的技术课题
7.然而,由于移动体与施工机械彼此独立地进行移动,因此移动体自身需要具备驱动源的电源。电源的容量越大,其重量也会变得越重,因此电源容量受限。因此,存在难以长期运行移动体的问题。
8.本发明的目的在于实现移动体的长期运行。
9.用于解决技术课题的手段
10.本发明提供一种起重机,其具有:
11.起重机主体;及
12.移动体,在所述起重机主体的周围移动,
13.其中,
14.所述起重机主体具有电力供给机构,
15.所述起重机具有与所述移动体连接并从所述电力供给机构向所述移动体供给电力的电力供给路部件。
16.并且,本发明提供一种起重机主体,其具有:
17.电力供给机构,向在起重机主体的周围移动的移动体供给电力;及
18.电力供给路部件,与所述移动体连接并且从所述电力供给机构向所述移动体供给电力。
19.并且,本发明提供一种移动体,其在起重机主体的周围移动从而进行辅助工作,其中,
20.所述移动体经由电力供给路部件与设置于所述起重机主体的电力供给机构连接,从而从所述电力供给机构接受电力供给。
21.发明效果
22.根据本发明,能够实现移动体的长期运行。
附图说明
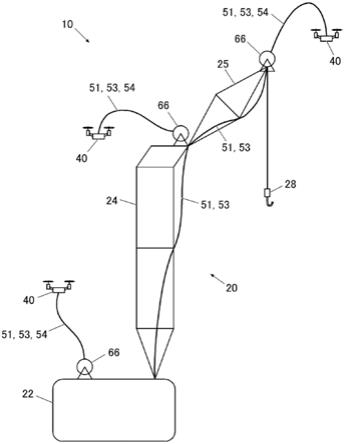
23.图1是用于说明本发明的实施方式所涉及的起重机的概略的图。
24.图2是表示移动体的控制系统的框图。
25.图3是起重机主体的侧视图。
26.图4是表示起重机终端的控制系统的框图。
27.图5是电源供给系统例子(1)的结构框图。
28.图6是电源供给系统例子(2)的结构框图。
29.图7是电源供给系统例子(3)的结构框图。
30.图8是表示通过塔架及吊臂进行电源供给的布线例的说明图。
31.图9是表示沿着图8的v
‑
v线剖切的上部回转体的水平截面中的内部布线例的说明图。
32.图10是表示通过塔架及吊臂来进行电源供给的另一布线例的说明图。
33.图11是表示移动体相对于起重机主体的另一配置例的说明图。
34.图12是用于说明移动体搭载于履带起重机的起重机的概略的图。
具体实施方式
35.[发明的实施方式的概要]
[0036]
图1是本发明的实施方式所涉及的起重机的概略图。
[0037]
如图1所示,起重机10构成为主要具备起重机主体20及在起重机主体20的周围移动的多个移动体40。
[0038]
各移动体40构成为如下:连接于作为电力供给路部件的电力供给电缆51的末端部,从而从起重机主体20接受电力供给,其中,所述电力供给电缆51从设置于起重机主体20的后述的上部回转体22的上部、后述的塔架24的上端部及后述的吊臂25的末端部位置处的自动卷线盘66(即,卷绕机构)放出。
[0039]
上述电力供给电缆51处于一端部与移动体40侧物理且电连接,另一端部与起重机主体20侧物理且电连接的状态。
[0040]
并且,电力供给电缆51与后述的作为信息发送路部件的信息发送线53一同通过缠绕等方式与由高张力的强化钢丝绳构成的防坠落线材54一体化,这些一体化的线材还具有防止移动体40坠落的功能。
[0041]
[移动体]
[0042]
移动体40是被称为无人机的机体,其具有多个旋翼,且其通过控制成为各旋翼的驱动源的马达的输出而飞行,并能够自如地进行升降动作、前后左右的移动、正反向的回转等。
[0043]
移动体40为了进行起重机主体20的工作的辅助性工作而在起重机主体20的周围进行移动。作为移动体40的辅助性工作的例子,可举出为了检修利用所搭载的摄像机41对起重机主体20进行拍摄、拍摄起重机主体20的周边图像或施工现场的俯瞰图像、利用所搭载的照明装置47对起重机主体20的施工现场进行照明、利用所搭载的把持装置48把持辅助绳(assist rope)来进行吊物工作辅助等,但并不只限于这些。
[0044]
如图2所示,移动体40具备作为拍摄机构的摄像机41、测位部421、方位传感器422、
高度传感器423、姿势传感器424、驱动部43、控制部44、数据存储部45、存储器46、照明装置47、把持装置48及通信部49。
[0045]
摄像机41被支承为从移动体40的机体朝向规定方向并根据机体的朝向而拍摄视线前方的景象。通过拍摄而获得的图像信号输出至与摄像机41连接的图像处理部411,图像处理部411生成规定形式的拍摄图像数据并将其存储于存储器46内。
[0046]
测位部421为gps(global positioning system,全球定位系统)等gnss(global navigation satelite system,全球导航卫星系统)接收机,其测定移动体40的当前位置。
[0047]
方位传感器422为三轴陀螺仪方位角传感器,其检测移动体40的行进方向及机体的倾斜角度。
[0048]
高度传感器423例如为光学传感器,其朝向下方照射光,并根据其反射光中产生的相位差来检测机体的高度。
[0049]
姿势传感器424由三维加速度传感器构成,其检测定义在移动体40的x轴、y轴、z轴各方向上的加速度。可以根据针对这些各轴检测出的重力加速度来检测机体的姿势。
[0050]
通信部49与用于连接移动体40和起重机主体20的信息发送线53的一端部连接,从而与起重机主体20的起重机终端30之间进行有线通信。
[0051]
通信部49例如接收来自外部的对移动体40的操纵指令并将其输出至控制部44。并且,通信部49将摄像机41的拍摄图像数据发送至起重机终端30。起重机终端30显示所接收的拍摄图像数据或将所接收的拍摄图像数据发送至外部服务器。
[0052]
驱动部43为输出用于移动体40的移动动作的推力的结构,其具有多个旋翼及分别设置于各旋翼的多个旋转驱动源(即,马达)。控制部44以使机体朝向目标移动方向进行移动的方式控制各马达。
[0053]
数据存储部45为存储移动体40的控制程序及与控制相关的各种信息的非易失性存储装置。
[0054]
存储器46存储由摄像机41拍摄的摄像图像数据。
[0055]
控制部44为所谓的控制器,其控制移动体40的上述各结构。
[0056]
照明装置47由光源及光学系统构成,其被支承为从移动体40的机体朝向与摄像机41视线相同的方向投射光。
[0057]
把持装置48由把持部及致动器构成,其能够切换辅助绳端部的把持和释放。
[0058]
并且,移动体40并未搭载用于向上述各结构供给电力的电池等电源。取而代之,接入有从起重机主体20朝向移动体40供给电力的电力供给电缆51(即,电力供给路部件)。
[0059]
电力供给电缆51的一端部与电源控制部52连接,电源控制部52向移动体40的各结构供给所需电力。
[0060]
另外,本发明并不禁止将电池搭载于移动体40,也可以搭载小型电池以备来自起重机主体20的电力供给中断时的异常情况。
[0061]
并且,在移动体40有时会搭载有不对驱动部43供给电源的微细的电池等,例如,用于使控制部44的内置时钟持续工作的电池或备份用电池等。
[0062]
[起重机主体]
[0063]
根据图3对起重机主体20进行说明。在此,作为起重机主体20,例示了所谓的移动式的塔式起重机。在以下关于起重机主体20的记载中,将起重机主体20的行进方向(与上部
回转体22的朝向无关地指下部行走体21的预先设定的行进方向)设为“前”,将后退方向设为“后”,将朝向前的状态下的左手侧设为“左”,将朝向前的状态下的右手侧设为“右”。
[0064]
如图3所示,起重机主体20构成为包括可自行的履带式下部行走体21、可回转地搭载于下部行走体21上的上部回转体22、可俯仰地安装于上部回转体22的前侧的前置附件23。
[0065]
上部回转体22构成起重机主体20的起重机主体,其具有沿前后方向延伸的回转框架221。在回转框架221的前侧设置有动臂安装部222,在该动臂安装部222,可俯仰地安装有后述的塔架24的基端249。
[0066]
并且,在回转框架221中的动臂安装部222的后侧附近设置有桅杆安装部223。在该桅杆安装部223,可转动地安装有后述的桅杆224的基端。而且,在回转框架221中的比桅杆安装部223更靠后侧的位置,可转动地安装有后述的防后倾装置225的基端。
[0067]
在回转框架221的后侧配设有平衡前置附件23及吊物的重量的配重226。并且,在回转框架221的后侧配设有动臂俯仰绞盘等(未图示)。另一方面,在回转框架221的前部右侧设置有配置有驾驶员座及各种操作装置(均未图示)的操纵室227。
[0068]
前置附件23设置于上部回转体22上,其在地面与高处之间搬运材料等货物。前置附件23构成为包括塔架24、吊臂25、塔架撑杆(strut)26。
[0069]
塔架24可俯仰地安装于上部回转体22上。塔架24由如下构成:下部动臂241,基端(脚部(foot))249可俯仰地安装于回转框架221的动臂安装部222;多个(例如,三段)中间动臂242,基端安装于下部动臂241的末端;及上部动臂243,安装于位于最末端侧的中间动臂242的末端。在下部动臂241安装有后述的吊臂俯仰绞盘244及主卷绞盘245。
[0070]
如图3所示,在长度方向上彼此相邻的中间动臂242的各支柱部件分别利用连结销连结在一起。并且,位于最下侧的中间动臂242与下部动臂241之间以及位于最上侧的中间动臂242与上部动臂243之间也分别利用连结销连结在一起。
[0071]
上部动臂243在塔架24处于立起的姿势(图3所示的姿势)时呈上部向前侧突出的形状,上部动臂243的下边部安装于位于最上侧的中间动臂242的末端(上端)。在上部动臂243的前端侧,可俯仰地安装有后述吊臂25,在上部动臂243的上端侧,可摆动地安装有后述的塔架撑杆26。并且,在上部动臂243,朝向后方突出设置有三角形状的滑轮托架246。在该滑轮托架246上可旋转地安装有塔导向滑轮247及导向滑轮248。
[0072]
吊臂25可俯仰地安装于塔架24的上部动臂243的末端。吊臂25由如下构成:下部吊臂251,基端可俯仰地安装于上部动臂243;中间吊臂252,安装于下部吊臂251的末端;及上部吊臂253,设置于中间吊臂252的末端。在上部吊臂253的末端侧,可旋转地安装有导向滑轮254和点滑轮(point sheave)255。导向滑轮254和点滑轮255上卷绕有后述的主卷绳索256。
[0073]
塔架撑杆26可摆动地安装于塔架24的上部动臂243的上端侧。塔架撑杆26是通过利用第1连结部264、第2连结部265及第3连结部266连结第1撑杆261、第2撑杆262及第3撑杆263而构成为三角形状的结构体。
[0074]
在此,塔架撑杆26的第1连结部264安装于上部动臂243的上端侧。由此,塔架撑杆26以第1连结部264为支点可摆动地安装于塔架24的上端。并且,在第2连结部265连接有绷绳267的一端,绷绳267的另一端与吊臂25的上部吊臂253的末端侧连接。而且,在第3连结部
266连接有后述的动臂侧绷绳274。
[0075]
吊臂俯仰绞盘244安装于塔架24的下部动臂241。吊臂俯仰绞盘244经由塔架撑杆26使吊臂25俯仰。吊臂俯仰绞盘244与塔架撑杆26的第3连结部266之间被吊臂俯仰绳索27连接。
[0076]
吊臂俯仰绳索27设置于吊臂俯仰绞盘244与塔架撑杆26之间。吊臂俯仰绳索27由如下构成:下部吊具271,具有安装于塔架24的中间动臂242的多个滑轮;上部吊具272,具有与下部吊具271对置设置的多个滑轮;卷绕绳索273,在依次卷绕在下部吊具271的滑轮和上部吊具272的滑轮的状态下卷绕于吊臂俯仰绞盘244;及动臂侧绷绳274,一端与上部吊具272连接且另一端与塔架撑杆26的第3连结部266连接。
[0077]
因此,通过使吊臂俯仰绞盘244卷绕或放出卷绕绳索273,上部吊具272相对于下部吊具271靠近或远离,塔架撑杆26以第1连结部264为支点进行摆动。该塔架撑杆26的摆动经由绷绳267传递至吊臂25,由此吊臂25在塔架24的末端侧进行俯仰。
[0078]
主卷绞盘245位于吊臂俯仰绞盘244的上侧附近且安装于塔架24的下部动臂241。在主卷绞盘245卷绕有主卷绳索256的一端侧。主卷绳索256的另一端侧经由滑轮托架246的导向滑轮248、吊臂25的导向滑轮254及点滑轮255之后安装于吊物吊钩28。因此,通过使主卷绞盘245卷绕或放出主卷绳索256,能够使吊物吊钩28升降。
[0079]
防后倾装置225设置于回转框架221与塔架24的下部动臂241之间。该防后倾装置225从背后支承立起状态的塔架24。
[0080]
桅杆224的基端可转动地安装于回转框架221的桅杆安装部223。桅杆224的末端是能够沿上下方向乃至前后方向转动的自由端。
[0081]
在桅杆224的末端设置有动臂用吊具228,该动臂用吊具228与塔架24的上部动臂243之间经由具有一定长度的绷绳229连接在一起。并且,依次卷绕于动臂用吊具228和回转框架221侧的吊具(未图示)的动臂俯仰绳索291卷绕在设置于回转框架221的塔架俯仰绞盘(未图示)。
[0082]
因此,若使塔架俯仰绞盘卷绕动臂俯仰绳索291,则能够拉拽绷绳229来使塔架24立起。另一方面,若使塔架俯仰绞盘放出动臂俯仰绳索291,则能够经由绷绳229使塔架24俯向(倒向)地面侧。
[0083]
图4是表示起重机终端30的结构的框图。起重机终端30是搭载于起重机主体20的控制终端,其执行对起重机主体20的行走、回转、起吊等各种动作的控制及异常检测处理。
[0084]
起重机终端30具备控制器31,该控制器31包括具有cpu、存储装置(即,r om及ram)及其他周边电路等的运算处理装置。
[0085]
如图4所示,在控制器31连接有测力传感器321、动臂角度传感器322、操作量传感器323、吊臂角度传感器324、极限开关325、输入部331、显示装置332、报警器341、停止装置342、通信部35、电源控制部36、操作杆37及控制阀38。
[0086]
测力传感器321安装于动臂用吊具228上,其检测作用于使塔架24俯仰的动臂俯仰绳索291的张力,并将与检测出的张力相对应的控制信号输出至控制器31。
[0087]
输入部331例如为触控面板,其将与操作者的操作相对应的控制信号输出至控制器31。操作者能够对输入部331进行操作从而设定主卷绳索256的卷绕数、塔架长度和吊物吊钩28的质量等。
[0088]
动臂角度传感器322安装于塔架24的基端侧,其检测塔架24的俯仰角度(以下,还记载为动臂角度),并将与检测出的动臂角度相对应的控制信号输出至控制器31。动臂角度传感器322例如检测相对于水平面的角度(即,对地夹角)作为动臂角度。
[0089]
吊臂角度传感器324安装于吊臂25的基端侧,其检测吊臂25的俯仰角度(以下,还记载为吊臂角度),并将与检测出的吊臂角度相对应的控制信号输出至控制器31。吊臂角度传感器324例如检测相对于水平面的角度(即,对地夹角)作为吊臂角度。
[0090]
极限开关325设置于吊臂25的末端部,并且,若吊物吊钩28卷扬至规定位置以上则进行工作,并通知控制器31。
[0091]
操作量传感器323例如检测液压先导式操作杆的操作量,并将与检测出的操作量相对应的控制信号输出至控制器31。
[0092]
显示装置332例如具备还用作输入部331的触控面板式显示器,并根据从控制器31输出的控制信号,在显示画面显示悬吊荷载的信息和作业姿势的信息。
[0093]
报警器341根据从控制器31输出的控制信号发出警报。
[0094]
停止装置342根据从控制器31输出的控制信号来停止分别与主卷绞盘245及吊臂俯仰绞盘244连结的液压马达(未图示)的驱动。停止装置342例如为能够切断从液压泵朝向液压马达的压力油的供给的电磁切换阀。
[0095]
通信部35与连接移动体40和起重机主体20的信息发送线53的另一端部连接,从而与移动体40之间进行有线通信。
[0096]
通信部35例如发送来自控制器31的对移动体40的操纵指令。并且,通信部35从移动体40接收摄像机41的摄像图像数据。基于所接收的摄像图像数据的摄像图像在控制器31的控制下显示于显示装置332。
[0097]
控制器31根据测力传感器321及动臂角度传感器322的输出计算出施加于吊物吊钩28的悬吊荷载。并且,若悬吊荷载为额定总荷载以上,则向停止装置342输出停止信号并向报警器341输出报警信号。
[0098]
并且,控制器31若接收到极限开关325的通知则向停止装置342输出停止信号并向报警器341输出报警信号。
[0099]
若停止信号输入到停止装置342,则停止吊臂俯仰绞盘244、主卷绞盘245的驱动。若报警信号输入到报警器341,则发出警报。
[0100]
控制阀38由根据来自控制器31的控制信号能够进行切换的多个阀构成。
[0101]
例如,控制阀38包括:切换从起重机主体20所具备的液压泵朝向驱动下部行走体21的驱动轮进行旋转的液压马达的液压的供给、切断及旋转方向的阀;切换从上述液压泵朝向驱动上部回转体22进行回转动作的液压马达的液压的供给、切断及旋转方向的阀;切换从上述液压泵朝向驱动塔架俯仰绞盘进行旋转的液压马达的液压的供给、切断及旋转方向的阀;切换从上述液压泵朝向驱动吊臂俯仰绞盘244进行旋转的液压马达的液压的供给、切断及旋转方向的阀;切换从上述液压泵朝向驱动主卷绞盘245进行旋转的液压马达的液压的供给、切断及旋转方向的阀等。
[0102]
操作杆37由通过控制器31分别向控制阀38的各种阀输入进行切换的控制信号的多个杆构成。
[0103]
例如,作为操作杆37之一的行走杆向上述的切换朝向驱动下部行走体21的驱动轮
进行旋转的液压马达的液压的供给、停止及旋转方向的阀输入切换信号。
[0104]
并且,作为操作杆37之一的回转杆向上述的切换从液压泵朝向驱动上部回转体22进行回转动作的液压马达的液压的供给、停止及旋转方向的阀输入切换信号。
[0105]
并且,作为操作杆37之一的动臂俯仰杆向上述的切换从液压泵朝向进行塔架俯仰绞盘进行旋转的液压马达的液压的供给、停止及旋转方向的阀输入切换信号。
[0106]
并且,作为操作杆37之一的吊臂俯仰杆向上述的切换从液压泵朝向驱动吊臂俯仰绞盘244进行旋转的液压马达的液压的供给、停止及旋转方向的阀输入切换信号。
[0107]
并且,作为操作杆37之一的卷起杆向上述的切换从液压泵朝向驱动主卷绞盘245进行旋转的液压马达的液压的供给、停止及旋转方向的阀输入切换信号。
[0108]
控制器31根据构成操作杆37的各种杆的操作向对应的构成控制阀38的各个阀输入与液压的供给、停止及旋转方向的切换相对应的控制信号,从而执行各液压马达的控制。
[0109]
由此,操作者能够对操作杆37进行操作从而执行起重机主体20的行走动作、上部回转体22的回转动作、塔架24的俯仰动作、吊臂25的俯仰动作、吊物吊钩28的升降动作。
[0110]
并且,起重机主体20还具备向包括起重机终端30的控制器31在内的起重机终端30的所有各结构供给电力的起重机控制用电源60。
[0111]
起重机控制用电源60由电池构成,并且与起重机终端30的电源控制部36连接,从而对起重机主体20的各结构供给所需电力。
[0112]
另外,在上述起重机终端30的例子中,例示了测力传感器321、动臂角度传感器322、操作量传感器323、吊臂角度传感器324、极限开关325、报警器341及停止装置342等进行异常处理的结构和操作杆37及控制阀38等进行常规操作的结构被控制系统集中控制的结构,但也可以构成为进行异常处理的结构和进行常规操作的结构分别具备进行单独控制的独立的控制器而成为独立的系统。
[0113]
[电源供给系统]
[0114]
将电源供给系统的例子(1)~(3)分别示于图5~图7。从起重机主体20朝向移动体40的电源供给可以根据它们之间的条件而适当选择(1)~(3)的系统例子的任一个。
[0115]
电源供给系统例子(1)适用于起重机控制用电源60和移动体40的电源电压均为直流且移动体40的电源电压更低的情况。
[0116]
在该系统例子(1)中,如图5所示,起重机主体20所具备的起重机主体发电机62将起重机主体原动机61作为驱动源而进行发电,从而对由电池构成的起重机控制用电源60进行充电。这些起重机主体原动机61、起重机主体发电机62及起重机控制用电源60的结构与搭载于现有起重机的发电机及电源的结构相同。即,起重机主体原动机61除了驱动起重机主体发电机62以外,还驱动向起重机主体20的各种液压驱动器供给液压的起重机主体液压泵67(参考图6)。并且,起重机控制用电源60为起重机终端30及与起重机终端连接的各种结构的电压供给源。
[0117]
并且,通过dc(direct current,直流电)/dc转换器63,将起重机控制用电源60的供给直流电压转换为移动体供给电源64的直流输入电压,从而对由电池构成的移动体供给电源64进行供电。
[0118]
而且,一端部与移动体供给电源64连接的电力供给电缆51以与捆绑起重机主体20的朝向规定对象物的电线或信号线而成的电缆线束65捆绑在一起的状态布线至自动卷线
盘66的设置位置,从自动卷线盘66放出的电力供给电缆51的另一端部与移动体40的电源控制部52连接。并且,通过电力供给电缆51对移动体40供给电源。
[0119]
另外,在上述结构中,起重机主体发电机62、起重机控制用电源60及移动体供给电源64相当于本发明的“电力供给机构”。
[0120]
另外,若起重机控制用电源60和移动体40的电源电压相等,则能够省略dc/dc转换器63和移动体供给电源64,可以从起重机控制用电源60对移动体40供给电力。
[0121]
电源供给系统例子(2)适用于移动体40的电源电压为直流且高于起重机控制用电源60的电源电压的情况。
[0122]
在该系统例子(2)中,如图6所示,起重机主体20所具备的起重机主体液压泵67将起重机主体原动机61作为驱动源而进行驱动,从而利用起重机主体液压泵67所输出的液压使大型发电机68工作。
[0123]
大型发电机68例如外置于起重机主体20的配重226之上。
[0124]
大型发电机68输出交流电,因此通过ac(alternating current,交流电)/dc转换器69将交流电转换为直流电。
[0125]
而且,通过dc/dc转换器70将ac/dc转换器69的供给直流电压转换为移动体供给电源64的直流输入电压,从而对移动体供给电源64进行供电。
[0126]
并且,与电缆线束65捆绑在一起的电力供给电缆51中途从自动卷线盘66单独引出而连接于移动体40的电源控制部52,由此对移动体40供给电源。该大型发电机68也可以兼作起重磁铁等附件或起重机的各种电气组件的电源。
[0127]
另外,在上述结构中,大型发电机68及移动体供给电源64相当于本发明的“电力供给机构”。
[0128]
电源供给系统例子(3)适用于起重机主体20并不自行发电而从外部接受电源供给的情况。
[0129]
在该系统例子(3)中,如图7所示,通过ac/dc转换器69将从位于起重机主体20外部的起重机主体外部电源71输入的交流电力转换为直流电力,并通过dc/dc转换器70转换为移动体供给电源64的直流输入电压,从而对移动体供给电源64进行供电。
[0130]
并且,与电缆线束65捆绑在一起的电力供给电缆51中途从自动卷线盘66单独引出而连接于移动体40的电源控制部52,由此对移动体40供给电源。
[0131]
另外,在上述结构中,起重机主体外部电源71及移动体供给电源64相当于本发明的“电力供给机构”。
[0132]
[电源供给的布线例]
[0133]
根据图8~图10对从起重机主体20向移动体40供给电源的布线例进行说明。图8表示通过塔架24及吊臂25进行电源供给的布线例,图9表示沿着图8的v
‑
v线剖切的上部回转体22的水平截面中的内部布线例。
[0134]
并且,图8及图9表示上述电源供给系统例子(1)中的布线例。
[0135]
如图9所示,在起重机主体20的上部回转体22的内部后方的侧面部附近配置有起重机控制用电源60、dc/dc转换器63、起重机终端30及移动体供给电源64。
[0136]
并且,在移动体供给电源64连接有捆绑设置于塔架24及吊臂25的测力传感器321、动臂角度传感器322、吊臂角度传感器324或极限开关325的电力供给线及信号线而成的电
缆线束65的一端部。
[0137]
与移动体40连接的电力供给电缆51的一端部连接于移动体供给电源64,与移动体40连接的信息发送线53的一端部连接于起重机终端30的通信部35。并且,电力供给电缆51及信息发送线53一体地捆绑在上述电缆线束65上,并沿着与电缆线束65相同的路径布线,与电缆线束65一同适当地固定于塔架24和吊臂25的多个位置上。即,电力供给电缆51及信息发送线53与设置于塔架24或吊臂25的电气组件(例如,测力传感器321、动臂角度传感器322、吊臂角度传感器324或极限开关325,但并不只限于此)的配线(电力供给线或信号线)一同固定于塔架24上。另外,在本实施方式中,电力供给电缆51及信息发送线53与捆绑所有配线而成的电缆线束65捆绑在一起,但也可以仅与一部分配线一同固定,或者也可以只有电力供给电缆51及信息发送线53中的一个与配线一同固定,或者也可以分别与不同的配线一同固定。以下,将电缆线束65及与电缆线束捆绑在一起的电力供给电缆51及信息发送线53统称为“电缆线束65等”。
[0138]
如图9所示,一端部连接于移动体供给电源64的电缆线束65等从上部回转体22的内部经由塔架24的脚销2411的内侧后布线到上部回转体22的外部。
[0139]
并且,如图8所示,引出到上部回转体22的外部的电缆线束65等沿着塔架24的主铁管2412布线至塔架24的上端部。而且,电缆线束65等沿着连结于塔架24的上端部的吊臂25的主铁管2512布线至吊臂25的末端部。
[0140]
在塔架24的上端部配置有自动卷线盘66,电力供给电缆51及信息发送线53在塔架24的上端部分支为设置于塔架24的上端部的自动卷线盘66侧和设置于吊臂25的末端部的自动卷线盘66(省略图示)侧。
[0141]
在塔架24的上端部分支的电力供给电缆51及信息发送线53分别与卷绕在自动卷线盘66的电力供给电缆51及信息发送线53连接。
[0142]
并且,朝向设置于吊臂25的末端部的自动卷线盘66侧延伸的电力供给电缆51及信息发送线53也分别与卷绕在设置于吊臂25的末端部的自动卷线盘66的电力供给电缆51及信息发送线53连接。
[0143]
图10表示上述电源供给系统例子(2)中的布线例。
[0144]
此时,在起重机主体20的上部回转体22的外部后方的配重226(图10中省略图示)上配置有大型发电机68、ac/dc转换器69及dc/dc转换器70。
[0145]
并且,它们与配置于上部回转体22的内部后方的移动体供给电源64连接,一端部连接于该移动体供给电源64的电力供给电缆51及一端部连接于起重机终端30的信息发送线53与电缆线束65一同经由塔架24的脚销2411的内侧后布线到上部回转体22的外部。
[0146]
并且,之后的路径则与图8的例子相同。
[0147]
[自动卷线盘]
[0148]
自动卷线盘66具备:卷筒,卷绕有电力供给电缆51、信息发送线53及防坠落线材54一体化而成的线材(称为复合线材);及复位弹簧,使卷筒向卷绕方向旋转,因此,若移动体40靠近自动卷线盘66,则能够自动卷绕多余的复合线材。如此,在本实施方式中,防坠落线材54并未设置于上部回转体22与自动卷线盘66之间,而是仅设置于自动卷线盘66与移动体40之间。并且,防坠落线材54优选与电力供给电缆51或信息发送线53分开设置,无需设为一体化的复合线材,可以在与电力供给电缆51或信息发送线53不同的位置与起重机10及移动
体40连结。
[0149]
另外,也可以在该自动卷线盘66中内置使卷筒卷绕的马达,从而进行卷绕控制。
[0150]
关于卷绕控制,例如如下进行:起重机终端30的控制器31(或其他专用的控制器)经由信息发送线53获取由上述移动体40所具备的测位部421检测的移动体40的当前位置,并根据从移动体40的当前位置所需的长度控制使卷筒卷绕和放出的马达以放出或卷绕复合线材。
[0151]
或者,也可以如下进行:设置检测从卷筒放出的复合线材的张力的传感器,并由控制器31(或其他专用的控制器)以在检测出的张力大于一定范围时放出复合线材而在小于一定范围时则卷绕复合线材的方式控制使卷筒卷绕的马达。
[0152]
[本发明的实施方式的技术效果]
[0153]
在上述起重机10中,起重机主体20具有电力供给机构,该电力供给机构通过电力供给电缆51与移动体40连接。
[0154]
因此,能够实现移动体40的轻型化的同时能够实现其长期运行。因此,移动体40能够长期进行各种工作。
[0155]
并且,移动体40不需要电源,因此容易导入大型的移动体40。
[0156]
并且,能够通过电力供给电缆51实现移动体40的防坠落。
[0157]
并且,在从对控制起重机主体20的动作的控制器31供给电力的起重机控制用电源60向移动体40供给电力时,无需移动体40具备专用的电源,能够利用起重机主体20现有的结构,因此能够容易以低成本实现移动体40的搭载。
[0158]
并且,在采用电力供给电缆51固定于起重机主体20的塔架24的结构时,能够容易在塔架24上的任意位置上配备移动体40。
[0159]
并且,由于电力供给电缆51与像电缆线束65那样的电气组件的配线一同固定于塔架24,因此能够将电缆线束65的设置路径直接利用于电力供给电缆51的设置,能够容易进行电力供给电缆51的设置。
[0160]
并且,由于信息发送线53也与电缆线束65一同设置,因此还能够容易进行信息发送线53的设置。并且,通过将电力供给电缆51与信息发送线53分开设置,能够迅速从移动体40向起重机主体20发送大容量的图像数据等。
[0161]
而且,由于防坠落线材54捆绑在电力供给电缆51上,因此能够抑制电力供给电缆51的断线并且能够实现移动体40的防坠落。并且,通过将电力供给电缆51与防坠落线材54分开设置,能够采用适于防坠落的材料,能够更加可靠地防坠落。
[0162]
并且,由于具备放出或卷绕电力供给电缆51的自动卷线盘66,因此能够抑制电力供给电缆51变得过长,从而能够抑制挂线或互缠的发生。
[0163]
[其他]
[0164]
此外,上述发明的实施方式中示出的细节能够在不脱离发明宗旨的范围内适当变更。
[0165]
图11是表示移动体40a相对于起重机主体20的另一配置例的说明图。
[0166]
也可以采用像图11所示的各移动体40a那样支承为能够沿着被支承于起重机主体20的导轨状的导向部件102~104滑动的结构。
[0167]
在各导向部件102~104上设置有能够沿着各导向部件102~104滑动的未图示的
滑块,从滑块延伸有支承各移动体40a的未图示的支承部件。支承部件以使各移动体40a的姿势能够在一定范围内变化(即具有自由度)的方式支承各移动体40a。
[0168]
并且,优选采取设置止转件、不将各导向部件102~104的截面设为圆形、分别由多个导轨构成各导向部件102~104等对策,以免各转动体40a围绕各导向部件102~104进行转动。
[0169]
并且,在采用将各移动体40a支承为能够沿着各导向部件102~104移动的结构时,可以将各移动体40a设为能够沿着各导向部件102~104行走而不能飞行的结构。即,移动体40a只要构成为能够在起重机主体的周围移动即可,其移动方式并不受特别限定。
[0170]
并且,此时可以采用从起重机主体20经由电力供给电缆51向各移动体40a供给电源的结构,但也可以沿着各导向部件102~104形成导轨状的电力供给路部件,并在各移动体40a侧设置与电力供给路部件接触的接点。此时,能够从起重机主体20经由电力供给路部件和接点向各移动体40a供给电力。并且,信息发送路部件也可以同样设置。
[0171]
并且,在上述实施方式中,作为起重机主体20的一例,例示了塔式起重机,但并不只限于此,也可以采用图12所示的由履带起重机构成的起重机主体20a上经由电力供给电缆51、信息发送线53及防坠落线材54连接移动体40的结构。
[0172]
并且,并不限于履带起重机,除了轮式起重机、卡车起重机等移动式起重机以外,还可以适用于港口起重机、桥式起重机、悬臂起重机、门型起重机、卸载机、固定式起重机等所有起重机。
[0173]
并且,并不只限于具备吊物吊钩的起重机,悬吊有磁铁或地钻斗等附件的起重机也是本发明的适用对象。
[0174]
产业上的可利用性
[0175]
本发明所涉及的起重机对具有在起重机主体周围移动的移动体的起重机具有产业上的可利用性。
[0176]
符号说明
[0177]
10
‑
起重机,20、20a
‑
起重机主体,24
‑
塔架,25
‑
吊臂,31
‑
控制器,36
‑
电源控制部,40、40a
‑
移动体,41
‑
摄像机,44
‑
控制部,47
‑
照明装置,48
‑
把持装置,51
‑
电力供给电缆(电力供给路部件),52
‑
电源控制部,53
‑
信息发送线(信息发送路部件),54
‑
防坠落线材,60
‑
起重机控制用电源(电力供给机构),61
‑
起重机主体原动机,62
‑
起重机主体发电机(电力供给机构),64
‑
移动体供给电源(电力供给机构),65
‑
电缆线束,66
‑
自动卷线盘(卷绕机构),68
‑
大型发电机(电力供给机构),71
‑
起重机主体外部电源(电力供给机构),102~104
‑
导向部件,2411
‑
脚销,2412
‑
主铁管。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1