用于将产品包装在纸箱中的包装机及其方法与流程
用于将产品包装在纸箱中的包装机及其方法
1.本发明总体上涉及一种包装机。更具体地,本发明涉及一种用于将产品包装在纸箱中的包装机及其方法。
2.用于将产品包装在纸箱中的包装机是已知的。例如,包装机用于对已经包装在折叠盒中的药品进行包装。在整个药品生产中,一直存在空间问题,这就需要使用节省空间的机器,即使是包装机也是如此。为了实现机器的经济运行、特别是在与药品有关的情况下,还需要机器具有高吞吐量(尽管需要节省空间的设计)。
3.在现有技术中还不能令人满意地实现上述方面。
4.因此,本发明的目的是公开一种包装机,该包装机消除了现有技术的上述问题。本发明的目的特别是公开了一种包装机,在该包装机中可以实现节省空间的设计和高吞吐量。
5.根据本发明的一种解决方案在于设计一种用于将产品包装在纸箱中的包装机,该包装机具有:产品进给器,用于进给要包装到纸箱中的产品;纸箱仓,在该纸箱仓中多个优选地胶合的纸箱坯件被布置成至少基本上扁平地收折;以及优选地静止的竖立工位,用于将纸箱坯件竖起以形成至少基本上块状的打开的纸箱,产品进给器具有至少基本上水平的第一输送方向,竖立工位在垂直于第一输送方向的至少基本上水平的横向方向上与纸箱仓相邻地定位,并且竖立工位被形成为至少在水平横向方向上是静止的。
6.该目的是通过根据本发明的包装机以令人满意的方式来实现的。
7.上述包装机具体地(但不限于)是一种所谓的二次包装机,该二次包装机被实施为生产包装物、特别是大包装物,也就是说,将产品、特别是已经包装在折叠盒中的制品分配到纸箱中。
8.就此而言,“水平”被理解为与包装机所定位的平面平行延伸的方向。“竖直”方向相应地被理解为是指包装机的“高度方向”。例如在包装机中,水平的第一输送方向是包装机的纵向方向。
9.就此而言,表述“至少基本上水平的”也旨在涵盖没有严谨地水平延伸的方向。相反,水平的第一输送方向至少在某些地方可以具有多达30
°
的倾斜度。因此,表述“至少基本上水平的”包含相对于实际水平方向的多达30
°
的偏差。
10.在纸箱仓中,纸箱坯件彼此相邻直立,优选地被布置成至少基本上扁平地收折。换句话说,它们在第一输送方向上相继地排列。为了将纸箱坯件进给到竖立工位,例如通过(抽吸)夹持器将(前)纸箱坯件从纸箱仓直接带到竖立工位(在水平横向方向上)。可以通过另一夹持器来将纸箱竖起。
11.因为纸箱坯件是胶合的,所以只需要在两侧拉动即可竖起,因此能够形成基本上块状的打开的纸箱。
12.产品优选地是矩形的。例如,产品是还例如含有药品的折叠盒。
13.静止竖立工位被理解为(收折的)纸箱不会例如通过输送带等从一个工位移动到另一工位。因此,在静止竖立工位中,用于形成基本上块状的打开的纸箱的整个竖立过程是在一个工位或位置发生的。自然,纸箱本身必须(例如,通过夹持器)移动才能竖起。
14.相应地,至少在水平横向方向上静止的竖立工位意味着在竖立过程中不会发生纸箱在水平横向方向上从一个工位移动到另一工位。总体上静止的竖立工位在两个方向上都是静止的,即,在水平横向方向上静止并且在水平第一输送方向上静止。
15.纸箱坯件仅在其如上文通过示例所述从纸箱仓移动到竖立工位后才竖起。因此,纸箱坯件首先在水平横向方向上从纸箱仓运送到竖立工位,然后将纸箱坯件竖起。
16.上述包装机的相当大的优势尤其在于该设计允许构造特别短(在包装机的纵向方向上和在第一输送方向上)。因此,纸箱仓通常被定位成使得在水平的第一输送方向上同样执行纸箱坯件的进给。因为在根据本发明的包装机中,纸箱仓在水平横向方向上进给纸箱坯件,所以包装机可以缩短的长度至少是纸箱仓的长度。此外,静止竖立工位还可以相应地减小包装机的长度和宽度。
17.根据本发明的有利的修改,纸箱仓以使产品进给器引导产品通过纸箱仓下方的方式定位在产品进给器上方。
18.作为替代方案,也可以将纸箱仓定位在产品进给器下方。
19.根据本发明的有利的修改,竖立工位被实施为将纸箱坯件在第一输送方向上竖立在一定高度处,纸箱仓也定位在该高度处。
20.就此而言,如上所述,第一输送方向也是包装机的纵向方向。
21.根据本发明的有利的修改,包装机还具有操作侧,纸箱仓定位在操作侧,并且竖立工位远离操作侧定位在纸箱仓后面。
22.特别地,操作侧优选地沿着产品进给器延伸。因为纸箱仓定位在产品进给器上方,所以产品进给器与纸箱仓都可以从操作侧操作。因此,需要操作员频繁介入(例如填充纸箱仓)的包装机的区域是易于进入的。
23.从操作侧、即从操作员的视角看,竖立工位定位在纸箱仓后面。换句话说,从操作侧看,竖立工位隐藏在纸箱仓后面。
24.例如,操作侧的特征可以在于其具有控制面板或类似的控制元件。
25.根据本发明的有利的修改,产品进给器具有堆叠设备,该堆叠设备被实施为至少将第一组产品竖直堆叠在第二组产品上方或下方。
26.根据本发明的有利的修改,堆叠设备还被实施为将堆叠的各组产品从下层输送到在竖直方向上较高的上层。
27.自然,根据实施例,也可以执行从上层到下层的输送。因此,堆叠设备通常还用于克服产品进给器的入口与纸箱仓之间的高度差。
28.根据本发明的有利的修改,产品在第一输送方向上被进给到堆叠设备并且在第二输送方向上从堆叠设备向前输送,第二输送方向至少基本上与第一输送方向相反。
29.就此而言,优选地通过输送带执行在第一输送方向上的输送,而优选地通过滑动件(产品进给滑动件)执行在第二输送方向上的输送。具体地,这是因为在第一输送方向上输送的产品没有堆叠,而在第二输送方向上输送的产品已经堆叠。
30.这还意味着堆叠设备定位在产品进给器的与产品进给器的产品入口相反的纵向端部处(在第一输送方向上)。在这种情况下,输送方向的方向改变使得可以实现包装机的短的设计(在纵向方向上)。
31.根据本发明的有利的修改,包装机还具有用于用产品来填装纸箱的纸箱填装工
位,该纸箱填装工位在第一输送方向上与竖立工位相邻地定位在下游。
32.在这种情况下,纸箱填装工位在第一输送方向上定位在一定高度处,产品进给器的端部和产品槽分别定位在该高度处。
33.根据本发明的有利的修改,产品槽定位在产品进给器的端部处,在该产品槽处收集一组要包装的产品,其中,滑动件定位在产品槽处,该滑动件被实施为在纸箱填装工位处将这组要包装的产品在至少基本上水平的滑动方向上滑到纸箱中,该滑动方向至少基本上垂直于第一输送方向。
34.在此,各个工位的放置和实施也实现了极短的设计。
35.根据本发明的有利的修改,包装机还具有贴签设备,该贴签设备被实施为优选地从下方为纸箱提供标签。
36.贴签设备优选地具有仓盒和贴签导向器,其中标签从仓盒运送到贴签导向器。为此,例如,可以设置标签运送设备,该标签运送设备将仓盒连接到贴签导向器。
37.贴签设备被实施为将其(至少基本上)定位在“途经”的纸箱下方。就此而言,贴签导向器以使得标签可以被胶合到纸箱上的方式伸入纸箱的运送路径中。在此,贴签设备(或者更严谨地说是贴签导向器)被定位成可以将标签贴到纸箱的正面、端面和/或底面。换句话说,根据贴签导向器的定位,可以将标签贴到纸箱上的正面、底面或角部(正面到底面)周围。在这种情况下,纸箱的各面参考运送方向,即,正面是在运送方向上朝向前方,并且底面是在运送方向上处于底部。
38.根据本发明的有利的修改,包装机还具有纸箱输送设备,该纸箱输送设备被实施为将纸箱从竖立工位运送到纸箱填装工位,并且从纸箱填装工位运送到纸箱封闭工位,在该纸箱封闭工位处将打开的纸箱折叠和/或胶合以形成封闭的纸箱,纸箱输送设备的输送方向在第一输送方向的方向上延伸。
39.因此,在输送方向上所见,竖立工位定位在纸箱填装工位的上游,纸箱填装工位进而定位在纸箱封闭工位的上游。
40.根据本发明的有利的修改,贴签设备至少基本上定位在纸箱输送设备下方。
41.纸箱输送设备的输送运动对于贴签也是特别需要的。换句话说,贴签设备(或者更严谨地说是贴签导向器)自身是静止的,并且贴签所需的纸箱与导向器之间的相对运动是通过纸箱输送设备的输送运动来执行的。
42.优选地,贴签设备可以与纸箱翻转工位一起定位,该纸箱翻转工位被实施为翻转纸箱。
43.根据本发明的有利的修改,包装机还具有:码垛工位,该码垛工位具有平台和scara机器人,该scara机器人定位在平台上,并且该scara机器人被实施为使要堆装在托盘上的纸箱移动;以及托盘进给器,该托盘进给器被实施为沿着路径进给空托盘,该平台以桥状方式实施,并且该路径延伸穿过码垛工位的平台下方。
44.因此,包装机不仅是二次包装机,而且还将纸箱包装到托盘上。因此,包装机特别地是一种适合于包装和码垛的组合机器。
45.根据本发明的有利的修改,平台用作要堆装在托盘上的纸箱的中间储存器。
46.本发明的目的还通过一种用于借助于上述包装机中的一种将产品包装在纸箱中的方法来达到。
47.用于对产品进行包装的方法也可以以令人满意的方式达到该目的。特别地,相应的包装机带来的所有方面和优点也适用于此。
48.根据本发明的另一解决方案在于一种用于将元件、优选纸箱定位在托盘上的包装机,该包装机具有:码垛工位,该码垛工位具有平台和scara机器人,该scara机器人定位在平台上,并且该scara机器人被实施为使要堆装在托盘上的纸箱移动;以及托盘进给器,该托盘进给器被实施为沿着路径进给空托盘,该平台以桥状方式实施,并且该路径延伸穿过码垛工位的平台下方而到达托盘装载工位。
49.根据本发明的包装机以令人满意的方式实现了该目的。特别地,上述包装机是节省空间的,因为托盘进给器定位在平台下方。在这种情况下,可以例如通过托盘车、叉车或其他运送车辆将空托盘放置在平台下方。随后将空托盘从托盘进给器运送到托盘装载工位,在托盘装载工位中通过scara机器人来装载托盘。
50.一旦托盘已经满载,可以将托盘保存在托盘装载工位,直到通过托盘车、叉车或其他运送车辆将其取走。因此,托盘进给器至少是半自动的。
51.根据本发明的有利的修改,平台用作要堆装在托盘上的元件的中间储存器。
52.在这种情况下,在托盘更换期间,平台特别地用作中间缓冲区。换句话说,即使在托盘更换期间,scara机器人也继续接收要堆装在托盘上的元件。但是scara机器人不再将这些元件直接移到托盘上,而是将它们暂时储存在码垛工位,或者更严谨地说是储存在平台上。因此,前述的机器或工位可以继续按照自己的周期节奏运行,并且吞吐量不会受到负面影响。
53.一旦托盘进给器已将新的(空)托盘进给到托盘装载工位,就可以将暂时储存在平台上的要堆装的元件装载到托盘上。
54.根据本发明的有利的修改,平台的面积大于托盘的面积。
55.就此而言,优选地,平台的长度和宽度略大于托盘的长度和宽度,以便托盘可以完全定位在平台下方。这样能够实现码垛工位的非常紧凑的设计。
56.根据有利的修改,scara机器人具有主体、上臂以及下臂,上臂被紧固到主体上以便上臂可以围绕第一旋转轴线旋转,并且下臂被紧固到上臂上以便下臂可以围绕平行于第一旋转轴线延伸的第二旋转轴线旋转,scara机器人还具有控制器,该控制器被实施为允许下臂与上臂交叉。
57.上臂自身可以相对于主体竖直运动。第一旋转轴线和第二旋转轴线位于上臂的相反两端。优选地,scara机器人还在下臂上具有附加的第三旋转轴线(在与第二旋转轴线相反的端部),用于抓取元件(纸箱)的抓取单元(手)定位在下臂处。
58.scara机器人因此能够竖直运动,并且具有广泛且可变的动作半径。具有上臂和下臂的实施例特别是还可以非常靠近主体放下元件,或者更严谨地说放在scara机器人的基座上。这样能够实现可用空间的最佳使用。
59.特殊的控制器(该控制器被实施为使得下臂能够与上臂交叉)扩展了机器人的运动可能性。在此背景下,“交叉”被理解为是指下臂从上臂下面穿过;下臂因此在上臂下方穿行。这方面尤其是根据本发明的scara机器人的控制或致动的区别性特征。
60.根据本发明的有利的修改,托盘(优选自动地)通过叉车装载到托盘进给器上并且由托盘装载工位卸载。
61.换句话说,托盘进给操作不仅可以以半自动方式执行,而且可以以全自动方式执行;通过全自动执行,自动叉车带来空托盘并带走满托盘。
62.根据本发明的有利的修改,包装机还具有上游贴签设备,该上游贴签设备被实施为优选从下方为元件提供标签。
63.根据本发明的有利的修改,元件是纸箱,并且包装机还具有上游纸箱封闭工位,在此处将打开的纸箱折叠和/或胶合以形成封闭的纸箱。
64.根据本发明的有利的修改,贴签设备与纸箱翻转工位一起定位,该纸箱翻转工位被实施为翻转纸箱。
65.在纸箱翻转工位处,纸箱可以被翻转,以便随后可以将标签放置在所需的一侧,例如以便可在托盘上读取标签。
66.根据有利的修改,贴签设备至少基本上定位在纸箱封闭工位下方和/或纸箱翻转工位下方。
67.根据有利的修改,包装机在码垛工位的上游具有:产品进给器,用于将产品包装在纸箱中,其中,包装机具有:产品进给器,用于进给要包装到纸箱中的产品;纸箱仓,在该纸箱仓中多个优选地胶合的纸箱坯件被布置成至少基本上扁平地收折;以及优选地静止的竖立工位,用于将纸箱坯件竖起以形成至少基本上块状的打开的纸箱,产品进给器具有至少基本上水平的第一输送方向,竖立工位在垂直于第一输送方向的至少基本上水平的横向方向上与纸箱仓相邻地定位,并且竖立工位被形成为至少在水平横向方向上是静止的。
68.已经提及的与产品进给器、纸箱仓和竖立工位有关的所有方面也都适用于此。
69.根据本发明的有利的修改,纸箱仓以使产品进给器引导产品通过纸箱仓下方的方式定位在产品进给器上方或下方。
70.根据本发明的有利的修改,产品进给器具有堆叠设备,该堆叠设备被实施为至少将第一组产品竖直堆叠在第二组产品上方或下方。
71.根据本发明的有利的修改,堆叠设备还被实施为将堆叠的产品组从下层输送到在竖直方向上较高的上层,产品在第一输送方向上被进给到堆叠设备并且在第二输送方向上从堆叠设备向前输送,第二输送方向至少基本上与第一输送方向相反。
72.根据本发明的解决方案还在于公开一种用于将元件、优选纸箱放置到托盘上的方法,即借助于上述包装机中的一种来放置的方法。相应地,与各个包装机相关的上述方面和优点也适用。
73.根据本发明的有利的修改,该方法还具有以下步骤:以使下臂与上臂交叉的方式致动scara机器人。这种致动尤其是扩展了scara机器人的移动可能性。
74.根据本发明的一种解决方案还在于公开了一种用于将产品包装在纸箱中的包装机,该包装机具有用于将要包装到纸箱中的产品进给到产品进给器,产品具有长度p,产品进给器具有堆叠设备,该堆叠设备被实施为至少将第一组产品竖直堆叠在第二组产品上方或下方,该第一组产品彼此相邻地定位成长度为r的一列,该第二组产品同样彼此相邻地定位成长度为r的一列,长度r是长度p的倍数,产品槽定位在产品进给器的端部处,在该产品槽处收集已堆叠的长度为r的各列产品,长度为s的滑动件定位在产品槽处,该滑动件被实施为使已堆叠的长度为至少对应于长度s的各列产品在至少基本上水平的滑动方向上滑到纸箱填装工位处的纸箱中,长度s比长度r短的长度是长度p的至少一倍。
75.根据本发明的包装机以令人满意的方式实现了该目的。特别地,上述包装机确保了,例如,尽管包装机是短设计,其吞吐量也可以增加并且可以保持在高水平。
76.产品的长度p(产品优选地是折叠纸板盒)是当产品定位在产品进给器上时产品在产品进给器的(第一)输送方向上的长度。因此,这对应于产品在运送方向上从前到后的长度。由此可见,长度r也是长度p的倍数,因为长度为r的排是由多个长度为p的产品构成的。在这种情况下,被定位成一列的产品的数量例如取决于产品长度和纸箱大小。
77.滑动件的长度s垂直于滑动件的滑动方向延伸。换句话说,长度s表示并预先决定可以通过一次滑动过程输送到纸箱中的一列产品的最大长度。滑动件的高度进而指示并预先决定彼此堆叠的各列产品的最大高度。因此,滑动件总体上表示可以通过一次滑动过程输送到纸箱中的产品的最大数量。
78.滑动件的长度s仅至少基本上对应于可以通过一次滑动过程输送到纸箱中的彼此堆叠的各列产品的长度的原因是,滑动件的长度s优选被实施为略小以便刚好放入纸箱,如下文将更详细地解释的。
79.长度s比长度r短的长度是长度p的至少一倍。换句话说,当产品滑入时,至少有一叠产品以在这次滑动过程中没有滑入纸箱中的“余留堆叠”的形式留下。如果长度s比长度r短的长度是长度p的两倍,则剩下的两叠产品则相应地留下。
80.在上述包装机中,堆叠设备构成了生产过程中的瓶颈。换句话说,堆叠设备预先决定包装机的整体周期节奏。因此,期望堆叠设备始终输送最大可堆叠量(即长度r)的产品。因此,长度r对应于要堆叠的产品的最大堆叠长度或者更严谨地说是最大列长。
81.因为在一个周期中,行进通过堆叠设备的产品的量大于随后通过单次滑动过程填装到纸箱中的产品的量,所以可以在产品槽之前建立缓冲区,这有助于加速包装机的总体吞吐量。换句话说,堆叠设备的“缓慢”堆叠时间不会对包装机的周期时间产生强大影响。
82.根据本发明的有利的修改,产品槽具有用作缓冲区的前部区域,该前部区域的长度v至少对应于长度p。
83.这意味着可以在前部区域中储存至少一叠产品。不言而喻,若干叠产品(例如,两叠或三叠)可以优选地彼此相邻地储存在前部区域中。
84.根据本发明的有利的修改,在包装机的操作期间的长度s至多、优选地至少基本上对应于要填装的纸箱的长度。
85.在这种背景下,如应用于要填装的纸箱的长度的表述“优选地至少基本上”意味着长度s优选地略小于纸箱的长度。这尤其有意义,因为滑动件必须行进到纸箱中。例如,滑动件的每一侧都比纸箱小10mm。
86.根据本发明的有利的修改,长度s至少在包装机的操作之前是可调整的并且可以适应于要填装的纸箱的长度。
87.因此,包装机可以用于填装多种规格的纸箱。例如,在这种背景下,可以想到将滑动件改变并更换为不同长度s(或不同高度)的滑动件。
88.根据本发明的有利的修改,表示可以插入的产品的最大列长的滑动件的最大可调整长度s
max
介于400mm与800mm之间、优选地介于500mm与700mm之间、特别优选地是约600mm。
89.根据本发明的有利的修改,前部区域的长度v至少基本上对应于滑动件的最大可调整长度s
max
的一半;前部区域的长度v特别优选地是300mm。
90.根据本发明的有利的修改,包装机还具有错误零件排出部,该错误零件排出部被实施为将不应填装的产品在它们在堆叠设备中分组之前排出。
91.就此而言,不应填装的产品可以是要填装的类型的有缺陷的产品和/或不应填装的类型的无缺陷的产品。因此,错误零件排出部确保了不会将这些产品填装在纸箱中。
92.根据本发明的有利的修改,产品进给器具有至少基本上水平的第一输送方向,其中错误零件排出部在第一输送方向上定位在堆叠设备的下游,优选地与堆叠设备相邻地定位。换句话说,在第一输送方向上看,错误零件从堆叠设备的下游分出。
93.根据本发明的有利的修改,产品在第一输送方向上被进给到堆叠设备并且在第二输送方向上从堆叠设备向前输送,第二输送方向至少基本上与第一输送方向相反。
94.根据本发明的有利的修改,包装机具有优选地光学监控装置(比如相机),该监控装置被实施为检测产品是否是不应填装的产品,该包装机还被实施为当监控装置检测到不应填装的产品时触发错误零件排出部,以便排出不应填装的产品。为此,错误零件排出部也具有收集容器,在该收集容器中收集不应填装的产品。
95.根据本发明的有利的修改,监控装置在第一输送方向上定位在堆叠设备的上游,优选地与堆叠设备相邻地定位。
96.因此,监控装置定位在堆叠设备之前,而错误零件排出部定位在堆叠设备之后。这种定位特别考虑到对由监控装置拾取的信号(例如,在相机的情况下是图像)进行处理所需的时间。
97.根据本发明的有利的修改,堆叠设备还被实施为将堆叠的各组产品从下层输送到在竖直方向上较高的上层。
98.根据本发明的一种解决方案还在于公开一种将产品包装在纸箱中的方法,即借助于上述包装机中的一个来包装的方法。相应地,该目的也可以通过该方法以令人满意的方式实现,其中包装机的各单独方面都适用于该方法。
附图说明
99.以下将参考附图基于示例性实施例的描述来对本发明进行更详细地解释,在附图中:
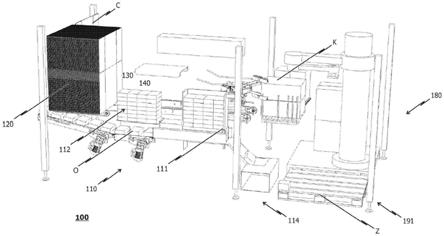
100.图1示出了从操作侧看的根据本发明的包装机的示意性俯视图;
101.图2示出了根据本发明的包装机的另一示意性俯视图;
102.图3示出了从与操作侧相反的一侧看的根据本发明的包装机的另一示意性俯视图;以及
103.图4至图7示出了根据本发明使产品滑入纸箱中的过程的示意图。
具体实施方式
104.在下文中,首先参考图1,以便给出根据本发明的包装机100的概览。
105.包装机100用于将产品o包装在纸箱k中,然后将它们堆叠在托盘z上。为此,包装机100在其入口处具有产品进给器110。产品进给器110用于将产品o进给到包装机100。例如,产品o可以是折叠盒。产品o沿至少基本上水平的第一输送方向移动。这是附图中所示的包装机100的纵向方向。在图1中,输送方向是从左到右。在这种情况下,产品入口定位在包装
机100的一端(在图1中的左侧)。堆叠设备111定位在产品进给器110的另一侧(在图1的右侧)。
106.堆叠设备111将第一组产品o竖直堆叠在第二组产品上方。各组产品o各自定位成长度为r的一列。在此所示的示例中,长度各自为p的四个产品o被定位为长度为r的一列。因此,在此长度r对应于长度p的四倍。在这个示例中,堆叠设备111将七组产品o彼此堆叠。
107.在图1中,在与堆叠设备111相邻的右侧(即,第一输送方向的下游)设有错误零件排出部114。这些用于将不应填装的产品从包装过程排出。
108.在堆叠设备111处,产品o的输送方向发生改变。从图1中的这点开始,产品o从右向左进给,并且因此在与第一输送方向相反的第二输送方向上。特别地,产品被输送到产品槽112。
109.进一步,在第二输送方向上与产品槽112相邻地设置了纸箱仓120,纸箱坯件c以扁平收折的方式储存在纸箱仓中。在垂直于第一输送方向(并且也垂直于第二输送方向)的至少基本上水平的横向方向上与纸箱仓120相邻地设置了竖立工位130,在该竖立工位处可以将纸箱坯件c竖起。在竖立工位130的下游,在第一输送方向上存在纸箱填装工位140,可以在该纸箱填装工位处填装已竖起的纸箱k。
110.包装是从产品槽112、即在至少基本上水平的滑动方向上、到定位在纸箱填装工位140中的纸箱k中执行的。在此,滑动方向垂直于第一输送方向(并且也垂直于第二输送方向),并且因此平行于横向方向。
111.图1示出了从操作侧看的包装机100,包装机100可以从该操作侧操作。这也意味着产品进给器110沿着操作侧(从左到右)延伸。纸箱仓120和错误零件排出部114同样定位在操作侧。特别地,产品进给器110在纸箱仓120下方延伸。已堆叠的产品o也沿着操作侧行进,然后产品从该操作侧在产品槽112处滑走。
112.这也意味着竖立工位130和纸箱填装工位140没有朝向操作侧定位。相反,从操作侧看,竖立工位130隐藏在纸箱仓120后面,并且纸箱填装工位140隐藏在产品槽112后面。
113.因此,总的来说,需要操作员频繁介入的设备和工位被定位成更靠近操作侧,而那些很少或根本不需要介入的设备和工位被定位成更远离操作侧。
114.纸箱k由纸箱输送设备160从竖立工位130进给到纸箱填装工位140。在这种情况下,纸箱输送设备160的输送方向平行于第一输送方向。纸箱输送设备160将纸箱k向前输送到纸箱封闭工位170和纸箱翻转工位175。
115.在此之后,由定位在码垛工位180的平台181上的scara机器人182将纸箱k取走。在此,码垛工位180用于将纸箱k输送到托盘z上。为此,设有托盘进给器190,该托盘进给器将空托盘z进给到码垛工位180和/或托盘装载工位191。
116.以下将更详细地描述本发明的选定的各单独方面。就此而言,各自单独考虑的各单独方面可以形成权利要求的基础(例如,作为分案申请的一部分)。相应的各单独方面也可以全部彼此组合,使得所含的包装机和/或方法的各单独方面中的一个、几个或所有方面都可以作为权利要求的基础。
117.一方面,单独考虑的各单独方面的相应效果各自有助于各单独方面的改进。另一方面,综合考虑各单独方面的几个或所有影响,导致包装机总体上得到改进,该包装机在具有高吞吐量的同时还节省了空间。
118.纸箱仓
119.在下文中,将描述特别涉及纸箱仓120的方面。这些方面可以与其他各单独方面(比如错误零件排出部114、码垛工位180、贴签设备150或堆叠设备111)组合。
120.如图1至图3中可见,纸箱仓120定位在产品进给器110上方。就此而言,将纸箱坯件c从纸箱仓120垂直于产品进给器110的第一输送方向(和第二输送方向)远离操作侧输送到竖立工位130。例如,优选地预胶合的纸箱坯件c可以通过(抽吸)夹持器从纸箱仓120中移取。
121.在图1中,示出了部分隐藏在纸箱仓120后面的(预胶合的)纸箱坯件c,该纸箱坯件在竖立工位130中处于扁平收折位置。同样可见的是,纸箱坯件c在横向方向(相对于第一输送方向)上延伸。纸箱坯件c已经在横向方向上从纸箱仓130取出,在该横向方向上纸箱坯件直立定向,在第一输送方向上与彼此相邻的其他纸箱坯件c一起压扁。
122.在图2中,纸箱坯件c已经被竖起以形成纸箱k,并且不再能从操作侧看到(被定位成隐藏在竖立工位130后面)。但是纸箱k从相反侧是可见的,在图3中示出。在此,示出了纸箱坯件c,该纸箱坯件已经以可以从(至少基本上水平的)横向方向被产品o填充的方式竖立以形成至少基本上块状的打开的纸箱k。为此,纸箱输送设备160将纸箱k输送到纸箱填装工位140。
123.到竖立工位130的“纸箱进给方向”垂直于“产品进给方向”(第一输送方向)使得可以在包装机100的纵向方向上节省空间。在纸箱仓120在包装机100中的位置,该纸箱仓(被定位成更靠近操作侧)还易于让操作员接近。纸箱仓120可以因此易于重新填充。
124.错误零件排出部
125.尤其如图1和图2中可见,错误零件排出部114定位在产品进给器110的端部。在这种情况下,从第一输送方向看,错误零件排出部114定位在堆叠设备111的下游。例如,错误零件排出部114具有运动检测器,该运动检测器将错误零件输送到斜槽,该斜槽进而将错误零件输送到收容器中。
126.错误零件排放114联接并功能性地连接到监控装置(未示出)。就此而言,监控装置用于检测错误零件,即不应填装的产品。例如,监控装置可以是比如相机等光学监控装置。
127.在此,监控装置优选地在第一输送方向上定位在堆叠设备111的上游(即之前)。在特别优选的实施例中,监控装置定位在堆叠设备111的入口处。因为监控装置和错误零件排出部114在流动方向上放置在不同位置,所以可以确保有足够的处理时间来检测错误零件并适当地触发错误零件排出部114。
128.在特别优选的实施例中,错误零件排出部114和监控装置在第一输送方向上放置在相同位置。这需要对监控装置记录的数据进行相应快速的数据处理。
129.具有平台和scara机器人的码垛工位
130.下一方面特别涉及将纸箱k码垛到托盘z上。
131.如图2中可见,码垛工位180具有平台181,该平台以桥状方式实施。scara机器人182位于平台181上,并且将纸箱k(或者更通用地说是元件)放置到托盘z上。因为平台181以桥状方式定位,所以可以在平台181下方储存空托盘z。当在图2左侧看到的托盘z满载时,由叉车将其(优选地自动)拾取,并且托盘进给器190将已经暂时储存在平台181下方的空托盘z输送到托盘装载工位191。
132.当旧托盘z被输送走并且新托盘z尚未放置在托盘装载工位191中准备就绪时(在托盘更换期间),暂时不能将纸箱k装载到托盘z上。纸箱k暂时储存在平台181上,以使得先前的工位可以继续以其自己的周期时间操作,并且托盘装载工位180不会导致周期时间的延长。
133.为此,scara机器人182被实施为以甚至能够与其紧邻地放下纸箱k的方式运动的能力。scara机器人182具有主体186。主体186具有紧固到该主体上的上臂183,该上臂能够围绕第一旋转轴线183(在上臂的第一端处)旋转。上臂183的另一端具有紧固到该上臂上的下臂184的第一端,该下臂能够围绕第二旋转轴线旋转。下臂184的第二端具有紧固到该下臂上的手185,该手能够围绕第三旋转轴线旋转。手185是纸箱k的抓取单元。三条旋转轴线彼此平行地定向。此外,上臂183能够沿着主体186竖直运动。因此,scara机器人182整体是极其机动的,并且具有大的动作半径。
134.在这一点上的区别性特征是scara机器人182的控制器。scara机器人182被实施为能够以使得下臂184在上臂183下方行进的方式致动。因此,下臂183可以一直旋转(360度)。
135.贴签设备
136.下一个单独方面涉及贴签设备150,该贴签设备被设置成将标签贴到纸箱k上。
137.尤其如图3中可见,贴签设备150定位在纸箱输送设备160下方。特别地,贴签设备150可以定位在纸箱封闭工位170和/或纸箱翻转工位175的区域下方。贴签设备150具有贴签导向器151和贴签仓152。贴签导向器151在纸箱输送设备160的方向上突出并伸入纸箱k行进的输送路径中。
138.纸箱k穿过纸箱输送设备160的运动导致纸箱k与贴签设备150接触并且特别是与贴签导向器151接触。如此,可以将标签贴到纸箱k上。根据贴签导向器151的取向,在此可以将标签贴到正面、底面、或正面和底面(即在边缘上)。
139.堆叠设备和产品槽
140.以下将描述本发明的另一子方面,该子方面特别涉及增加包装机100的吞吐量。
141.堆叠设备111被实施为将第一组产品o竖直堆叠在第二组产品o上方,该第一组产品彼此相邻地定位成长度为r的一列,该第二组产品同样彼此相邻地定位成长度为r的一列。在这种情况下,在列方向上所见,产品o本身具有长度p。这也对应于产品o在第一输送方向上的长度(从前到后)。
142.堆叠设备111是包装机100的瓶颈。因此,在此期望将最大可能的量(最长可能的一列产品o)彼此堆叠。堆叠设备111因此优选地始终是最大装载的。从堆叠设备111,被定位成长度为r的一列的已堆叠的纸箱被输送到产品槽112(如图2中可见,通过产品进给滑动件116)。
143.从产品槽112,多个产品o滑入纸箱k中。就此而言,在滑动过程中插入的产品o的数量少于在堆叠过程中彼此堆叠的产品o的数量。特别地,滑动件113具有长度s,该长度比长度r短。简单地说,如果长度s比长度r短的长度是长度p的一倍,则一叠产品o留下。相应地,如果长度s比长度r短的长度是长度p的两倍,则彼此相邻的两叠留下。
144.这就是产品槽112具有前部区域作为可以使各叠产品o留下的缓冲区的原因。因此,产品槽112可以以比堆叠设备111更快的节奏进行操作。
145.以下将基于图4至图7通过示例来解释该原理。这些图是从操作员侧所见的操作的
示意图。在这种情况下,堆叠设备111定位在右侧,并且产品槽112定位在左侧。还示出了产品进给滑动件116。
146.图4示出了长度为s的滑动件113。在产品槽112中不再有任何产品o。堆叠设备111已经供送了第一产品o、或者更严谨地说是六叠产品o。
147.在图5中,产品进给滑动件116已经将产品o滑入产品槽112中;只有四叠可以随后通过滑动件113向前滑动。
148.在图6中,长度为s的滑动件113已经将四个可滑动的堆叠滑入纸箱中。两叠产品o作为剩余量留在产品槽112的前部区域中。此外,堆叠设备111再次供送六叠产品o。
149.图7示出了产品进给滑动件116如何将产品o从堆叠设备111移向产品槽112。现在,滑动件113可以将前四叠输送到纸箱k中。产品进给滑动件116随后可以将剩余的四叠放到适当的位置,并且滑动件113同样可以将它们输送到纸箱k中。在此,上述序列从头开始(即,在图1中)。
150.因此,可以从整体上增加包装机100的吞吐量,即,吞吐量不受堆叠设备111的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1