卷扬机的制作方法
1.本发明涉及卷扬机。
背景技术:
2.在卷扬机中,例如,如专利文献1所示,存在如下的类型:利用负载传感器对卷扬机主体或悬挂的货物的载荷进行测量,使与该测量出的载荷对应的驱动力从电动机输出。在专利文献1中,公开了即使在被倾斜地施加了力的情况下,也仅检测垂直方向的载荷的结构。
3.具体而言,插通于上部挂钩(悬吊部件16)的孔部中的轴(17)被托架(18)中的在上方侧相对的一对延伸部支承为沿ra方向旋转自如。另外,载荷转换器(3)的连接轴(19)被托架(18)中的在下方侧相对的一对延伸部支承为沿rb方向旋转自如。进一步地,载荷转换器(3)的第二连接部(3l、3r)被连接板(5l、5r)支承为沿rc方向旋转自如。另外,在载荷转换器(3)上安装有应变部(3b)。
4.【现有技术文献】
5.【专利文献】
6.专利文献1:日本专利,特开2018-128365号公报
技术实现要素:
7.(发明所要解决的课题)
8.然而,在专利文献1所示的结构中,上部挂钩(悬吊部件16)经由一根轴(17)支承货物装卸辅助装置(1)或货物的载荷,因而采用较粗的轴。因此,导致卷扬机的大型化。
9.另外,在专利文献1所示的结构中,在上部挂钩(悬吊部件16)的下侧,经由允许上述那样的旋转的连杆机构支承应变部(3b),因此结构变得复杂。
10.本发明是鉴于上述情况而完成的,其目的在于提供一种:具备在不会使卷扬机大型化的情况下,以简单的结构高精度地检测负载的传感器的卷扬机。
11.(用于解决课题的方案)
12.为了解决上述课题,根据本发明的第一观点,提供一种卷扬机,其悬挂货物并进行该货物的升降,该卷扬机具有如下特征。
13.具备:上部挂钩,其具有挂钩基底部,且具有在与悬挂货物的悬挂方向正交的正交方向上贯通挂钩基底部的插通孔;支承轴,其在中央部具有插通于插通孔的挂钩侧大径部,在两端部具有端部大径部;主体框架,其具有一对支承孔,并且,在使一侧的端部大径部插通于一个支承孔且使另一侧的端部大径部插通于另一个支承孔的状态下,经由支承轴悬挂支承于上部挂钩;以及负载测量单元,其在支承轴的从挂钩侧大径部连续至端部大径部的中间部上,具有径向截面积比该中间部小的畸变变形部,该负载测量单元安装于该畸变变形部,并且测量作用于畸变变形部的剪切载荷;从挂钩侧大径部连续的中间部的至少一部分被插入支承孔。
14.另外,在上述的发明中,优选:插通孔以中心轴线平行的状态设置有两个,在各插通孔中分别插通有支承轴。
15.另外,在上述的发明中,优选:具备阻止支承轴从支承孔脱落的防脱单元。
16.另外,在上述的发明中,优选:防脱单元设置于基板罩,该基板罩覆盖与负载测量单元电连接的电路板。
17.另外,在上述的发明中,优选:负载测量单元经由连接线与电路板连接;连接线沿着横槽被引出,该横槽沿着支承轴的轴向并且从外周侧凹陷。
18.(发明效果)
19.根据本发明,可提供一种能够通过将支承轴的应变计测部配置于主体框架的支承孔内,从而形成安全且简单的结构的卷扬机。
附图说明
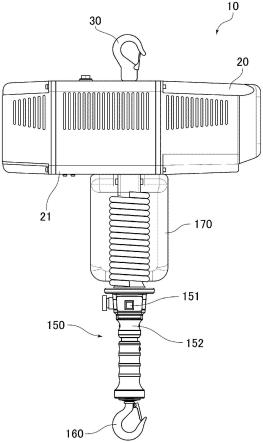
20.图1是表示本发明一实施方式涉及的卷扬机的整体结构的图。
21.图2是表示图1所示卷扬机的控制结构的图。
22.图3是表示图1所示卷扬机中的负载传感器的安装结构的侧剖视图。
23.图4是表示图1所示卷扬机中的负载传感器的安装结构的俯视剖视图。
24.图5是表示图1所示卷扬机所具备的支承轴的结构的立体图。
25.图6是表示将连接线向图1所示卷扬机所具备的支承轴的引导槽引导的状态的剖视图。
具体实施方式
26.以下,根据附图对本发明一实施方式涉及的卷扬机10进行说明。另外,在以下的说明中,z方向是指悬挂下部挂钩160的悬挂方向(垂直方向),z1侧是指垂直方向的上侧,z2侧是指垂直方向的下侧。另外,在本实施方式中,将与垂直方向正交的水平方向中的支承轴100的轴向设为x方向,x1侧是指图3及图4中的右侧,x2侧是指图3及图4中的左侧。另外,y方向是指与支承轴100和z方向正交的方向。
27.《1.关于卷扬机10的结构》
28.图1是表示卷扬机10的整体结构的立体图。图2是表示卷扬机10的控制结构的图。如图1所示,卷扬机10作为主要的结构元件具备卷扬机主体部20、上部挂钩30、圆筒操作装置(cylindrical operation device)150、以及下部挂钩160。
29.卷扬机主体部20能够经由后述的上部挂钩30悬挂于顶棚、梁等的规定部位。该卷扬机主体部20在主体框架21的空腔部收纳有各种结构。具体而言,在主体框架21的空腔部中具备驱动电动机40、减速机构42、制动机构50、负载滑轮60、负载传感器80、控制部90以及驱动器92。
30.驱动电动机40是赋予驱动负载滑轮60的驱动力的电动机。在本实施方式中,驱动电动机40是具备用于检测位置的检测器(编码器41)的伺服电动机,但也可以是伺服电动机以外的电动机。
31.另外,减速机构42是将驱动电动机40的旋转减速并传递至负载滑轮60侧的部分。另外,制动机构50是如下部分:在驱动电动机40工作时,能够利用电磁力释放制动力的部
分,但即使在驱动电动机40不工作的状态下,也产生保持货物p的制动力的部分。负载滑轮60是将负载链c1卷起或解绕的部分,沿其外周设有多个供负载链c1的金属环进入的链槽。
32.负载传感器80对应于负载测量单元,是测量作用于卷扬机主体部20的后述主体框架21与上部挂钩30之间的负载的传感器。即,负载传感器80是对卷扬机主体部20的载荷、负载链c1的载荷、以及货物p的载荷的合计载荷进行检测的传感器。作为负载传感器80,能够使用应变计。另外,关于用于安装负载传感器80的安装结构,之后进行叙述。
33.控制部90是对驱动器92赋予位置、速度、转矩等的指令值的部分。作为控制部90,例如可举出微型计算机、定序器等。
34.另外,驱动器92是根据由控制部90赋予的用于电动机驱动控制的指令值,将从外部提供的电源控制为适当的电力,并将该电力提供给驱动电动机40而使该驱动电动机40旋转的部分。
35.另外,圆筒操作装置150是操作者在用手握住的状态下进行操作用的操作装置,其连结于负载链c1的下端侧。另外,在圆筒操作装置150上连结有用于挂住货物p的下部挂钩160。圆筒操作装置150具有动作模式切换开关151、可动把手152、以及位移传感器153。
36.另外,可动把手152设置成能够沿上下方向(z方向)滑动,将与其滑动量相应的检测信号输出至控制部90。控制部90根据负载传感器80检测出的负载信号或可动把手152的滑动量的检测信号等,对驱动电动机40进行驱动控制。
37.《2.关于用于安装负载传感器的安装结构》
38.接着,以下,对用于安装负载传感器80的安装结构的详细情况进行说明。图3是表示负载传感器80的安装结构的侧剖视图。图4是表示负载传感器80的安装结构的俯视剖视图。如图3及图4所示,在卷扬机主体部20的主体框架21的上部,设有从其上表面凹陷的挂钩用凹部22,还以包围该挂钩用凹部22的方式设有一对支承块部23。
39.在上述支承块部23上设置有支承孔24。支承孔24沿着与设想悬挂货物p的悬挂方向(z方向)垂直的方向(x方向)设置,并设置为贯通上述支承块部23。后述的支承轴100插通于该支承孔24中。
40.另外,上部挂钩30具备挂钩部31和挂钩基底部32。挂钩部31例如是挂卡在顶棚侧的规定部位(梁等)上的钩状的部分。另外,挂钩基底部32是相比挂钩部31位于垂直方向(z方向)的下侧(z2侧)的部分,且设置成厚度比挂钩部31大。在该挂钩基底部32上设置有插通孔33。插通孔33是贯通挂钩基底部32的孔,沿着与作为上述悬挂方向的垂直方向(z方向)正交的方向(水平方向)设置。后述的支承轴100插通于该插通孔33中。
41.另外,支承轴100是用于将上部挂钩30安装于主体框架21的轴部件。图5是表示支承轴100的结构的立体图。如图3至图5所示,支承轴100设置为对圆柱形状(圆棒形状)进行了适当加工后的形状。在该支承轴100上设置有挂钩侧大径部101、端部大径部102、以及中间部104。
42.如图3至图5所示,挂钩侧大径部101设置在支承轴100的轴向(x方向)上的中央侧。该挂钩侧大径部101的中央侧的部位插入插通孔33。而且,如图3所示,从挂钩侧大径部101的两端持续形成中间部104而在同轴上形成端部大径部102。
43.另外,端部大径部102分别设置于支承轴100的轴向(x方向)上的一端侧(x1侧)以及轴向(x方向)上的另一端侧(x2侧)。在以下的说明中,将位于一端侧(x1侧)的端部大径部
102称为“一端部大径部102a”,将位于另一端侧(x2侧)的端部大径部102称为“另一端部大径部102b”。
44.一端部大径部102a插入存在于一侧的支承块部23上的支承孔24(以下,称为“支承孔24a”)中。另外,另一端部大径部102b插入存在于另一侧的支承块部23上的支承孔24(以下,称为“支承孔24b”)中。另外,在本实施方式中,另一端部大径部102b的另一端侧从支承孔24b突出,但一端部大径部102a的一端侧不从支承孔24a突出。
45.另外,如图4和图5所示,中间部104是从挂钩侧大径部101连续至端部大径部102的传递载荷负载的部位,在中间部104的中央部分形成有畸变变形部103。如图3所示,中间部104是直径比挂钩侧大径部101和端部大径部102稍小的部分,且形成为直径小至即使负载作用于主体框架21与上部挂钩30之间而使支承轴100变形,也不会与支承孔24及插通孔33接触的程度。也可以取代使中间部104的直径小于挂钩侧大径部101,而是使支承孔24中的与中间部104相对的部分的直径大至中间部104不会接触的程度。畸变变形部103设置有从与支承轴100的轴向(x方向)和垂直方向(z方向)正交的方向(y方向)的一侧(y1侧)凹陷的第一凹部103a、和从另一侧(y2侧)凹陷的第二凹部103b。而且,在第一凹部103a与第二凹部103b之间设置有连结部103c。
46.另外,在第一凹部103a和第二凹部103b中,除了连结部103c以外,还设置有由连结部103c连结的上下一对的凸缘部103d。因此,畸变变形部103的从第一凹部103a和第二凹部103b的正面观察到的剖面形状呈大致h形形状,形成为截面积比中间部104小且能够利用负载传感器80(应变仪)高精度地测量剪切应变的形状。
47.另外,中间部104是与支承孔24的内表面呈非接触地相对的部分。通过该中间部104的存在,确保了畸变变形部103剪切变形的空间。另外,中间部104分别设置在挂钩侧大径部101侧和端部大径部102侧。另外,挂钩侧大径部101侧的中间部104也可以解释为构成挂钩侧大径部101的一部分,端部大径部102侧的中间部104也可以解释为构成端部大径部102的一部分。
48.另外,在第一凹部103a和第二凹部103b中分别配置有上述的负载传感器80。负载传感器80是例如利用惠斯通电桥电路对应变变形引起的电气电阻变化进行计测的应变仪,其安装于连结部103c。即,在支承轴100中的、截面积比挂钩侧大径部101和端部大径部102小的、形成于畸变变形部103的x-z平面的连结部103c的两侧面上,安装有负载传感器80。因此,当在上下方向上对支承轴100作用了负载(剪切载荷负载)时,连结部103c比挂钩侧大径部101和端部大径部102更大地弹性变形。因此,连结部103c通过安装负载传感器80,适合于剪切变形量(即负载)的测量。
49.另外,在支承轴100中,通常,畸变变形部103为截面积最小的部分。但是,也可以在支承轴100中采用:存在有用于作用载荷以外的目的的部位且截面积比畸变变形部103小的部位的结构。
50.在此,当在剪切方向上对支承轴100作用重复载荷时,畸变变形部103是与其它部分相比截面积急剧减小的部分,并且是最发生应力集中的部分,因此成为最容易断裂的部位。即,畸变变形部103对应于作为支承轴100中最容易发生断裂的部位的危险截面(断裂设想部)。
51.另外,如图4所示,在连结部103c上安装有负载传感器80的情况下,如图6所示,利
用树脂等的密封部件110将负载传感器80覆盖。因此,成为负载传感器80不露出于外部的状态。
52.另外,在支承轴100上还设置有横槽105。图6是表示在支承轴100的横槽105中布线有负载传感器80的连接线81的状态的剖视图。如图6所示,横槽105是用于引出将负载传感器80与电路板120电连接用的连接线81的槽,横槽105比支承轴100的外周面凹陷。这样的横槽105隔着支承轴100的轴心设置于水平方向(y轴方向)的一侧和另一侧(沿着支承轴的轴的水平方向的两侧)。在此,如图4所示,电路板120设置于比一端部大径部102a更靠轴向(x方向)的一侧(x1侧)。因此,在图4及图5所示的结构中,横槽105设置为在轴向(x方向)上,将挂钩侧大径部101和一端部大径部102a横切,横槽105连结分别成对的第一凹部103a、第二凹部103b,但不设置在另一端部大径部102b上。配置于横槽105内的连接线81,与负载传感器80同样地被密封部件111密封并紧贴于支承轴100。
53.另外,在电路板120上安装有连接线81的一端部,从而来自负载传感器80的检测信号被输入。该电路板120具有将来自负载传感器80的检测信号放大的放大器的功能。另外,电路板120对上述的控制部90输出基于来自负载传感器80的检测信号的电信号。该电路板120安装于主体框架21中的图3中右上侧的空腔部位、即基板安装空间25的规定部位。
54.另外,通过将连接线81的一端部安装于电路板120,连接线81还作为阻止支承轴100从支承孔24脱落的防脱单元发挥作用。为了提高这种作为防脱单元的功能,也可以将连接线81的至少一部分通过未图示的配线固定部件固定于主体框架21的规定部位。
55.在此,在本实施方式中,在支承轴100的四个部位粘贴有负载传感器80(应变仪),分别由多根连接线形成连接线81。支承轴100利用连接线81防止向配置有电路板120的一侧的脱落,在与配置电路板120的一侧相反的一侧,利用后述的防脱板防止脱落。
56.另外,在支承轴100的另一端侧(x2侧),安装有构成防脱单元的防脱板130。该防脱板130与另一侧的支承块部23的另一侧端面抵接,并通过螺钉紧固等的方法固定。另外,在防脱板130上设有插通孔131,并且,在该插通孔131中插入有存在于支承轴100的另一端侧的一对切口部106。如图5所示,切口部106是在与支承轴100的轴向(x方向)平行的状态下,将支承轴100的另一端侧切成平面状的部分。通过防脱板130与切口部106卡合,实现支承轴100的旋转方向上的定位。
57.另外,在支承轴100的另一端侧设置有沿着轴向(x方向)的规定深度的螺纹孔107。而且,通过经由垫圈132等将螺钉133拧入螺钉孔107,从而将防脱板130安装固定于支承轴100。因此,支承轴100被固定于主体框架21,沿着轴向移动,阻止了该支承轴100从支承孔24及插通孔33脱落。
58.另一方面,在支承轴100的一端侧(x1侧),基板罩140经由螺钉等安装于主体框架21。在该基板罩140上设有凸缘部141,该凸缘部141以堵塞存在于一侧的支承块部23上的支承孔24的一侧开口的至少一部分的方式安装于主体框架21。因此,基板罩140(凸缘部141)对应于阻止支承轴100从支承孔24脱落的防脱单元。
59.《3.关于作用》
60.在如上结构的卷扬机10中,如图3所示,在利用上部挂钩30悬挂卷扬机10的情况下,通过挂钩基底部32,向上的载荷w1作用于支承轴100的挂钩侧大径部101。另一方面,通过支承块部23,向下的载荷w2、w3作用于一端部大径部102a以及另一端部大径部102b。
61.因此,在支承轴100中的、剪切力作用的中间部104中,畸变变形部103的截面积设为较小。因此,畸变变形部103通过上述载荷w1-w3的作用,在中间部104中于剪切方向上较大地变形,其位移由负载传感器80检测。
62.在此,在重复载荷作用于卷扬机10而支承轴100断裂的情况下,其断裂部位通常成为在支承轴100中的剪切载荷所作用的部位之中最产生应力集中的畸变变形部103。在此,中间部104进入支承孔24的内部。因此,即使在畸变变形部103中发生支承轴100的断裂,形成于挂钩侧大径部101的端部上的中间部104的未形成畸变变形部的部分也与支承孔24的内壁面抵接,从而承受向下的载荷w2、w3。因此,能够可靠地防止上部挂钩30从卷扬机主体部20脱落。中间部104是与畸变变形部103一起配置在支承孔24内,并且即使因施加于支承轴100的负载而发生应变变形也不会与支承孔24接触的部分,在该中间部104的中央部形成有畸变变形部103。即使畸变变形部103断裂,截面积比畸变变形部103大的中间部104也会被支承孔24支承,因此,上部挂钩30不会从主体框架21脱落。
63.而且,即使由于支承轴100的断裂及其他原因而支承轴100欲向轴向(x方向)的另一侧(x2侧)移动,其移动也被防脱板130阻止。另外,即使支承轴100欲向轴向(x方向)的一侧(x1侧)移动,其移动也被基板罩140的凸缘部141阻止。
64.另外,即使处于基板罩140脱落的状态,也利用一端部安装于电路板120的连接线81来阻止支承轴100从支承孔24脱落。由于连接线81紧贴于支承轴100的侧面而进行布线,因此,在支承轴100断裂的情况下,来自负载传感器80及连接线81的电信号呈异常,能够在支承轴100脱落前,利用控制部90检测支承轴100的断裂。
65.《3.关于效果》
66.如上结构的卷扬机10具备上部挂钩30,该上部挂钩30具有挂钩基底部32,且具有在与悬挂货物p的悬挂方向(z方向)正交的正交方向上贯通挂钩基底部32的插通孔33。另外,卷扬机10具备支承轴100,该支承轴100在中央部具有插通于插通孔33的挂钩侧大径部101,在两端部具有端部大径部102。另外,卷扬机10具备:主体框架21,其具有一对支承孔24,在使一侧的端部大径部102(一端部大径部102a)插通于一个支承孔24、并且使另一侧的端部大径部102(另一端部大径部102b)插通于另一个支承孔24的状态下,经由支承轴100悬挂支承于上部挂钩30;以及负载测量单元(畸变变形部103、负载传感器80),其在支承轴100的从挂钩侧大径部101连续至端部大径部102的中间部104上,具有径向截面积比该中间部104小的畸变变形部103,安装于该畸变变形部103上并且测量作用于畸变变形部103的剪切载荷。而且,从挂钩侧大径部101连续的中间部104的至少一部分,被插入一个支承孔24和另一个支承孔24中。
67.因此,在卷扬机10中,在作用有重复载荷且支承轴100断裂的情况下,在支承轴100中的剪切载荷所作用的部位之中截面积最小的畸变变形部103处容易发生断裂。在此,从挂钩侧大径部101连续的中间部104进入支承孔24的内部。因此,即使在畸变变形部103中发生支承轴100的断裂,中间部104的端部侧也与支承孔24的内壁面抵接,从而承受向下的载荷w2、w3。因此,能够防止上部挂钩30从卷扬机主体部20脱落。由此,能够防止卷扬机主体部20和货物p向下方落下。由此,能够防止因卷扬机10的破损或掉落导致的事故。
68.另外,在本实施方式中,虽然采用仅使支承轴100插通上部挂钩30的插通孔33以及支承块部23的支承孔24的简单结构,但能够实现防止如上所述的上部挂钩30从卷扬机主体
部20脱落的结构。
69.另外,在本实施方式中,在挂钩基底部32上,插通孔33以中心轴线平行的状态设置有两个,在各插通孔33中分别插通有支承轴100。
70.因此,能够防止卷扬机主体部20相对于上部挂钩30旋转。因此,能够使卷扬机10的姿态稳定化,从而能够提高利用负载传感器80测量载荷的精度。另外,即使一个支承轴100断裂,通过另一个支承轴100的存在,也能够良好地防止卷扬机主体部20和货物p落下。
71.另外,在本实施方式中,具备阻止支承轴100从支承孔24脱落的防脱板130以及基板罩140(防脱单元)。
72.因此,通过防脱板130(防脱单元)以及基板罩140(防脱单元),能够阻止支承轴100试图沿着轴向(x方向)从支承孔24以及插通孔33脱落。因此,即使支承轴100在畸变变形部103处断裂,也能够防止:支承轴100从支承孔24和插通孔33脱落,从而卷扬机主体部20和货物p落下。
73.另外,在本实施方式中,防脱单元设置于基板罩140,该基板罩140覆盖与负载传感器80(负载测量单元)电连接的电路板120。因此,即使因支承轴100的断裂等而支承轴100欲向轴向(x方向)的另一侧(x2侧)移动,该移动也被基板罩140的防脱单元(凸缘部141)阻止。因此,能够防止卷扬机主体部20和货物p落下。
74.另外,在本实施方式中,负载传感器80(负载测量单元)经由连接线81与电路板120连接,连接线81沿着横槽105被引出,其中,横槽105是沿着支承轴100的轴向(x方向)并且从外周侧凹陷。
75.因此,即使支承轴100欲沿着轴向(x方向)从支承孔24和插通孔33脱落,也能够通过安装于电路板120的连接线81被拉拽,从而作为防止该支承轴100脱落的防脱件发挥作用。
76.《4.变形例》
77.以上,对本发明的各实施方式进行了说明,但本发明除此之外还能够进行各种变形。以下,对此进行叙述。
78.在上述实施方式中,关于卷扬机,对具备圆筒操作装置150、并且能够通过动作模式切换开关151将动作模式切换为开关动作模式和平衡器模式的结构进行了说明。但是,卷扬机不限于这样的类型。例如,也可以是虽然具备圆筒操作装置150,但不具备上述那样的动作模式切换开关151的类型。另外,也可以是不具备圆筒操作装置150的卷扬机。进一步地,卷扬机也可以为不具备供负载链c1挂绕的负载滑轮60而具备卷绕绳索的绳索卷筒这一结构。
79.另外,在上述实施方式中,对挂钩侧大径部101的端部侧被插入支承块部23的支承孔24中的结构进行了说明。但是,卷扬机也可以采用其他的结构。例如,也可以采用在挂钩基底部32的插通孔33内配置有畸变变形部103,并且端部大径部102侧的中间部104的至少一部分被插入插通孔33内的结构。
80.(符号说明)
81.10
…
卷扬机、20
…
卷扬机主体部、21
…
主体框架、22
…
挂钩用凹部、23
…
支承块部、24
…
支承孔、24a
…
支承孔、25
…
基板安装空间、30
…
上部挂钩、31
…
挂钩部、32
…
挂钩基底部、33
…
插通孔、40
…
驱动电动机、41
…
编码器、42
…
减速机构、50
…
制动机构、60
…
负载滑
轮、70
…
上限限位开关、71
…
下限限位开关、80
…
负载传感器(对应于负载测量单元)、81
…
连接线、90
…
控制部、91
…
存储器、92
…
驱动器、100
…
支承轴、101
…
挂钩侧大径部、102
…
端部大径部、102a
…
一端部大径部、102b
…
另一端部大径部、103
…
畸变变形部、103a
…
第一凹部、103b
…
第二凹部、103c
…
连结部、103d
…
侧壁部、104
…
中间部、105
…
横槽、106
…
切口部、107
…
螺纹孔、110
…
密封部件、120
…
电路板、130
…
防脱板(对应于防脱单元)、131
…
插通孔、132
…
垫圈、133
…
螺钉、140
…
基板罩(对应于防脱单元)、141
…
凸缘部、150
…
圆筒操作装置、151
…
动作模式切换开关、152
…
可动把手、153
…
位移传感器、160
…
下部挂钩、c1
…
负载链、p
…
货物、w1~w3
…
载荷
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1