一种自适应式臂架支架系统及工程车辆的制作方法
1.本发明涉及工程机械技术领域,更具体地说,它涉及一种自适应式臂架支架系统及工程车辆。
背景技术:
2.随着社会和经济的迅猛发展,建筑楼房越来越高,消防安全越来越成为人们关心的问题,这样就需要具备一定作业高度的巨型举高消防车来做保障。举高类消防车分为举高喷射消防车、登高平台消防车、云梯消防车,它们都具有专用底盘、转台、臂架、变幅机构、臂架支架等部件组成。臂架支架主要用于和转台一起承担行驶状态下的臂架系统的重量,防止臂架系统的起升和回收过程中与消防车其他部件发生干涉。
3.目前国内外举高类消防车的发展逐步趋向于更高更大更强,由于国家标准对道路车辆的高度限制,高米数的举高类消防车臂架系统均采用侧置臂架系统,以此来降低整车的行驶高度。臂架支架系统是臂架系统的主要支撑部件之一,侧置臂架系统由于设计和制造的误差使得一、二号臂架之间的高度差随机性很大,从而造成侧置臂架系统与臂架支架系统难以相互匹配,需要通过增减调整垫片来弥补,容易造成臂架系统受力不均,造成装配困难。
技术实现要素:
4.针对现有技术存在的不足,本发明的第一目的在于提供一种自适应式臂架支架系统,其优点是调节设计和制造过程中产生的随机性误差,改善臂架系统所受支撑力的协调,避免产生内应力造成疲劳破坏,提高装配的效率。
5.本发明的上述技术第一目的是通过以下技术方案得以实现的:一种自适应式臂架支架系统,包括一号臂架、二号臂架,所述一号臂架和二号臂架之间设有臂架支架,所述臂架支架包括固定支座和设置于所述固定支座上的支架结构,所述支架结构上设有用于分别支撑所述一号臂架、二号臂架的一号臂架固定支座和二号臂架支座,所述二号臂架支座与所述一号臂架固定支座之间设有上下调节组件,从而调节二号臂架与一号臂架齐平;所述二号臂架支座与支架机构之间设有自复位组件,从而支撑二号臂架支座限定其竖直方向位置。
6.进一步设置:所述上下调节组件包括竖直设置于所述一号臂架固定支座一侧的固定导轨和与所述固定导轨滑移配合的滑动导轨,所述滑动导轨对应设置于所述二号臂架支座靠近所述一号臂架固定支座的侧面上。
7.进一步设置:所述自复位组件包括水平设置于所述二号臂架支座的下端的固定板和和贯穿于固定板的自复位轴,所述固定板上贯穿有自复位轴,所述自复位轴上套设有压缩弹簧,所述压缩弹簧的一端与固定板连接,压缩弹簧的另一端与二号臂架支座下端面连接。
8.进一步设置:所述自复位组件包括水平设置于所述二号臂架支座的下端的固定板
和位于固定板下端的手动调节组。
9.进一步设置:所述手动调节组包括设置于固定板下端的调节套和所述调节套中设有的调节螺杆,所述调节螺杆上螺纹连接有调节螺母,所述调节螺杆的端部与所述二号臂架支座的下端面抵接。
10.本发明的第二目的在于提供一种自适应式臂架支架系统,其优点是实现消防车高空救援或高空消防作业,提高作业的稳固性和安全性。
11.本发明的上述技术第二目的是通过以下技术方案得以实现的:一种工程车辆,包括:车体;供水装置,设于所述车体内;如权利要求1至5中任一项所述的自适应式臂架支架系统,连接于所述车体上。
12.与现有技术相比,本发明具有以下有益效果:1、通过上下调节组件、自复位组件的设置,一号臂固定支座用于支撑和限位一号臂架;二号臂架放于二号臂架支座上,二号臂架支座可沿上下调节组件在一定范围内上下滑动(上下调节组件进行机械限位,行程10mm),自复位机构用于将二号臂架支座固定在调节范围内,用于调节一、二号臂架间的设计和制造过程中产生的随机性误差,改善臂架系统所受支撑力的协调,避免产生内应力造成疲劳破坏,提高装配的效率。
13.2、通过固定导轨和滑动导轨相互配合滑动的设置,确保二号臂架在二号臂架支座上即可起到支撑的作用也可起到限位的作用。
14.3、通过固定板、自复位轴和压缩弹簧的设置,可以确保在有效支撑二号臂架的同时,在导轨行程(10mm)范围内弥补二号臂与一号臂间的随机性误差,改善臂架系统所受支撑力的协调,避免产生内应力造成疲劳破坏。
15.4、通过固定板、自复位轴和压缩弹簧的设置,可以确保在有效支撑二号臂架的同时,在导轨行程(10mm)范围内弥补二号臂与一号臂间的随机性误差,改善臂架系统所受支撑力的协调,避免产生内应力造成疲劳破坏。
16.5、通过自适应式臂架支架系统设置于车体上,有利于实现消防车高空救援或高空消防作业,提高作业的稳固性和安全性。
附图说明
17.图1是本实施例的自适应臂架支架结构的结构示意图;图2是本实施例的滑动导轨和固定导轨的结构示意图;图3是本实施例中其中之一的自复位组件结构示意图;图4是本实施例中其中之一的自复位组件结构示意图;图5是本实施例的工程车辆的臂架支架俯视的结构示意图。
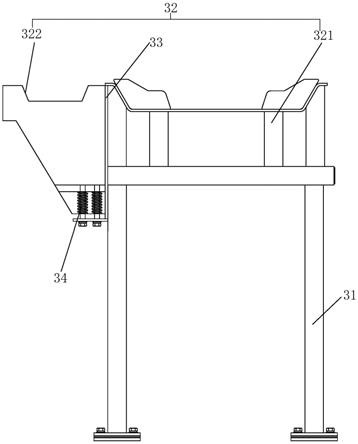
18.图中:1、一号臂架;2、二号臂架;3、臂架支架;31、固定支座;32、支架结构;321、一号臂架固定支座;322、二号臂架支座;33、上下调节组件;331、固定导轨;332、滑动导轨;34、自复位组件;341、固定板;342、自复位轴;343、压缩弹簧;344、手动调节组;3441、调节套;3442、调节螺杆;3443、调节螺母。
具体实施方式
19.下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明
的技术方案,而不能以此来限制本发明的保护范围。
20.参考图1,一种自适应式臂架支架系统,包括一号臂架1、二号臂架2,一号臂架1和二号臂架2之间设有臂架支架3,臂架支架3包括固定支座31和设置于固定支座31上的支架结构32,支架结构32上设有用于分别支撑一号臂架1、二号臂架2的一号臂架固定支座321和二号臂架支座322,二号臂架支座322与一号臂架固定支座321之间设有上下调节组件33,从而将二号臂架2与一号臂架1齐平;二号臂架支座322与支架机构之间设有自复位组件34,从而使限制二号臂架支座322在竖直方向的位置。
21.从以上技术方案可以看出:本申请实施方式的一号臂架固定支座321用于支撑和限位一号臂架1和二号臂架2,二号臂架支座322用于支撑和限位二号臂架2,由于臂架支架3系统在设计和制造过程中产生的一号臂架1、二号臂架2系统间随机性高度误差造成的臂架受支撑力不均的现象;通过上下调节组件33,即可弥补一号臂架1、二号臂架2间的随机高度误差,从而更好的为臂架支架3系统提供均匀的支撑力,确保一号臂架1、二号臂架2间受力协调,避免一号臂架1、二号臂架2之间产生内应力加速疲劳破坏的现象,延长其两者的寿命;同时通过自复位组件34用于将二号臂架支座322固定在调节一号臂架1、二号臂架2间的随机高度误差,用于调节一号臂架1、二号臂架2间的设计和制造过程中产生的随机性误差。
22.在本实施方式中,上下调节组件33包括竖直设置于一号臂架固定支座321一侧的固定导轨331和与固定导轨331滑移配合的滑动导轨332,滑动导轨332对应设置于所述二号臂架支座322靠近一号臂架固定支座321的侧面上。例如参照图2所示,固定导轨331沿一号臂架固定支座321的竖直方向设置,固定导轨331开设有燕尾槽,燕尾槽沿固定导轨331的长度方向设置;滑动导轨332靠近燕尾槽的侧面设有插接于燕尾槽的燕尾块,燕尾块与燕尾槽相互配合设置。当调节一号臂架1、二号臂架2之间产生的随机误差时,驱动二号臂架支座322沿一号臂架固定支座321的高度上下滑动,即可滑动导轨332的燕尾块沿一号臂架固定支座321的燕尾槽上下调节滑动,使得一号臂架1与二号臂架2齐平减少随机性高度误差,保持臂架之间支撑力均匀,受力协调,延长臂架的寿命。其中固定导轨331、滑动导轨332之间不限制于燕尾槽、燕尾块,还可为其它形状,在其它实施例中,根据情况限定固定导轨331、滑动导轨332的形状,在此不做具体冗赘。
23.参考图2,本实施方式中,自复位组件34包括水平设置于二号臂架支座322的下端的固定板341和和贯穿于固定板341的自复位轴342,其中自复位轴342的一端的底端与固定板341固定连接,自复位轴342上套设有压缩弹簧343,压缩弹簧343的一端与固定板341连接,压缩弹簧343的另一端与二号臂架支座322下端面连接,从而将二号臂架支座322限制于一号臂架固定支座321上。进一步地,自复位轴342与二号臂架支座322的下端面之间具有10mm的误差范围,从而用于调节一、二号臂架2间的设计和制造过程中产生的随机性误差;因此其工作调节原理为:一号臂架1、二号臂架2分别放于一号臂架固定支座321、二号臂架支座322,在支撑过程中,二号臂架支座322上的滑动导轨332沿一号臂架固定支座321的固定导轨331在一定范围内上下滑动,其中导轨之间进行限位,其行程为a=10mm;其中在滑动导轨332与固定导轨331之间上下滑移时,二号臂架支座322上下滑动,则压缩弹簧343朝向固定板341的方向压缩,从而调节一、二号臂架2间的设计和制造过程中产生的随机性误差;其中滑移导轨限制了二号臂架支座322除了上下滑动自由度外的其余5mm的自由度,这样可以还确保二号臂落在二号臂架支座322上自复位组件34即可起到支撑的作用也可起到限位
的作用。
24.参考图3,在另一实施方式中,自复位组件34包括水平设置于二号臂架支座322的下端的固定板341和位于固定板341下端的手动调节组344,具体地,手动调节组344包括设置于固定板341下端的调节套3441和调节套3441中设有的调节螺杆3442,调节螺杆3442上螺纹连接有调节螺母3443,调节螺杆3442的端部与二号臂架支座322的下端面抵接。具体地,调节螺杆3442与调节套3441螺纹连接,调节螺母3443进一步限定调节螺杆3442位于调节套3441之间的位置。当一号臂架1、二号臂架2分别放于一号臂架固定支座321、二号臂架支座322,在支撑过程中,二号臂架支座322上的滑动导轨332沿一号臂架固定支座321的固定导轨331在一定范围内上下滑动,其中导轨之间进行限位,其行程为a=10mm;其中在滑动导轨332与固定导轨331之间上下滑移时,一号臂架1、二号臂架2之间保持平衡,调节螺杆3442螺纹转动对二号臂架支座322上的二号臂架2即支撑又限位,调节螺母3443进一步的限位二号臂架支座322竖直方向的位置,从而自复位组件34满足自动调节余量的作用。
25.在其它实施例中,自复位组件34不限制于以上两种结构,还可为其他结构,包括气缸、电机等;在其它实施例中,根据情况限定自复位组件34,在此不做具体冗赘。
26.参照图5,在本实施例中,本申请的一种实施方式提供的工程车辆,包括车体(图中未出现);供水装置(图中未出现),设于所述车体内;以及上述所述的自适应式臂架支架3系统,其连接于所述车体上。从以上技术方案可以看出:自适应式臂架支架3系统用于支撑和限位的一号臂架1和二号臂架2,满足二号臂架支座322在竖直方向移动,同时具有自动调节一、二号臂架2间的设计和制造过程中产生的随机性误差,确保一、二号臂架2间受力协调,避免臂架系统产生内应力加速疲劳破坏。本实施例中,此工程车辆为举高类消防车,其他实施例中可为其它功能性车辆,在此不做具体冗赘。
27.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1