一种机场行李搬运机器人的制作方法
1.本发明涉及机器人技术领域,尤其涉及一种机场行李搬运机器人。
背景技术:
2.机器人是一种自动化的机器,所不同的是这种机器具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器,机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。
3.在机场,通常出行人携带大量行李,需要人工拖行或提行,通过行李搬运机器人可以对行李进行搬运,减低人们的负担。
4.但传统的行李搬运机器人在使用过程中不同乘客行李之间可能会发生碰撞,进而造成不必要的损坏,并且还需要乘客手动将行李放置到行李搬运机器上方,同时行李表面会沾染大量的灰尘,在长期的使用过程中行李搬运机器人表面也会附着上灰尘甚至雨水,进而会对后续乘客的行李造成污染,通过人工对机场行李搬运机器人清理需要耗费大量的人力与时间,因此需要一种机场行李搬运机器人
技术实现要素:
5.本发明的目的是为了解决现有技术中存在的缺点,而提出的一种机场行李搬运机器人。
6.为了实现上述目的,本发明采用了如下技术方案:
7.一种机场行李搬运机器人,包括搬运框体,所述搬运框体内部设置有搬运机构、分隔机构与更换机构,所述搬运机构设置在固定框的外部,所述分隔机构与更换机构之间活动连接;
8.所述搬运机构包括相对设置在固定框外侧壁上的机械臂,两个所述机械臂的侧壁上均固定安装有摄像头,所述分隔机构包括固定安装有固定框内部的多个驱动箱,所述驱动箱的内部活动设置有闭合板,所述闭合板的侧壁上固定连接有活塞杆,所述活塞杆由驱动箱的内部贯穿至驱动箱的外部,所述固定框的侧壁上开设有多个的安放槽,每个所述驱动箱与每个安放槽相匹配,所述安放槽的内部活动设置有压力板,所述活塞杆的远离闭合板的一端与压力板的侧壁固定连接,所述压力板的侧壁上固定连接有第一弹簧,所述第一弹簧的远离压力板的一端与驱动箱的侧壁固定连接,所述固定框的内部设置有多个传动箱,所述传动箱的内部活动设置有传动板,所述传动板的侧壁上固定连接有锁定杆,所述锁定杆由传动箱的内部贯穿至传动箱的外部,所述锁定杆远离传动板的一端固定连接有阻隔板,所述固定框的侧壁上开设有多个阻隔槽,所述阻隔板与阻隔槽的内部侧壁相滑动,所述更换机构包括清洁袋与设置在固定框的内部侧壁上通过轴承连接的多个第一连接杆,且第一连接杆可绕轴承转动,所述固定框的内部侧壁上通过轴承连接有多个第二连接杆,且第二连接杆可绕轴承转动,所述第二连接杆的侧壁上固定安装有套筒,所述清洁袋的两端分
别由固定框的外部贯穿至固定框的内部,所述清洁袋的两端分别于第一连接杆和套筒的侧壁相缠绕,所述压力板侧壁上活动设置有齿条,所述齿条的侧壁上固定连接有第二弹簧,所述第二弹簧的末端与压力板的侧壁固定连接,所述第二连接杆的侧壁上固定安装有齿轮,所述固定框的内部活动设置有多个卡块,所述卡块与齿轮的侧壁相卡紧,所述固定框的侧壁上固定安装有运输框体,所述运输框体的侧壁上固定安装有支架,所述支架的侧壁上固定安装有激光雷达,所述固定框的侧壁上固定安装有深度摄像头,所述固定框的侧壁上固定安装有毫米波雷达,所述固定框远离所述支架的侧壁上通过转轴连接有活动挡板,且活动挡板可绕转轴转动,所述固定框的侧壁上设置有电动升降杆,所述电动升降杆的输出端通过转轴与活动挡板的侧壁相连接,且电动升降杆的输出端可绕转轴转动,所述固定框的底部设置有驱动装置。
9.优选地,所述固定框的内部固定安装有圆环,所述圆环的内部活动连接有连接轮,所述连接轮的内部开设有多个贯穿腔,所述机械臂的转轴固定安装有传动杆,所述传动杆与圆环的侧壁固定连接,所述驱动箱的侧壁上通过出油管与圆环的侧壁固定连接,所述出油管与贯穿腔相连通,所述传动箱的侧壁上通过进油管与远离出油管一端的圆环侧壁固定连接,所述贯穿腔与进油管相连通。
10.优选地,所述第一弹簧与活塞杆的侧壁相缠绕。
11.优选地,所述闭合板与驱动箱的内部四周紧密贴合。
12.优选地,所述齿条与齿轮相啮合。
13.优选地,所述传动板与传动箱的内部四周紧密贴合。
14.优选地,所述运输框体的横截面呈坡型。
15.相比现有技术,本发明的有益效果为:
16.1、本发明通过激光雷达、深度摄像头、毫米波雷达的配合使用,可以对前方路面上的行人以及物体进行识别,避免在运动的过程中发生碰撞,同时还可以对行李进行检测,判断行李的位置,再通过驱动装置对固定框进行移动,使得固定框移动到行李的附近,通过机械臂、摄像头的配合使用可以对行李进行夹持放置,通过摄像头可以对机械臂的工作情况进行实时监控,进而能够准确的对行李进行夹持,当红外传感器检测到机械臂运动到固定框的后方时,电动升降杆带动活动挡板向下运动使得活动挡板与地面相抵紧呈斜坡转,便于对行李进行移动放置。
17.2、由于固定框的侧壁呈坡型,从而能够使得行李滑动到运输框体的最末端,当对行李安放结束后,机械臂恢复到原位,此时行李自身的重量会使得压力板向下移动,压力板通过活塞杆使得闭合板向下,从而对驱动箱内部的液压油进行挤压,液压油通过出油管进入到贯穿腔中,再通过进油管进入到传动箱中,进而使得传动板向上移动,传动板带动阻隔板向上移动实现对行李的分隔,避免对下位乘客的行李进行运输的时候会与其他行李发生碰撞,实现了对行李的保护,减少行李了不必要的损坏。
18.3、当固定框将行李运输到机场出口或者登机处时,将行李取下,此时在第一弹簧自身的弹力作用下压力板会向上运动,压力板带动齿条向上运动,由于齿条与齿轮相啮合,从而使得第二连接杆开始转动,第二连接杆带动套筒开始转动,进而对清洁袋进行缠绕,实现对清洁袋的更换,避免上位行李上的灰尘或雨水残留到运输框体的内部,不需要人工进行清洁,节省了大量的人力与时间,同时也更加卫生环保。
附图说明
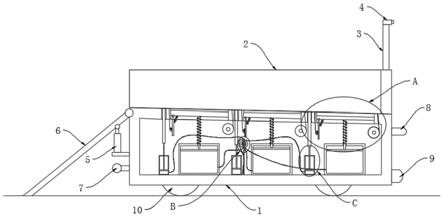
19.图1为本发明提出的一种机场行李搬运机器人的结构示意图;
20.图2为本发明的纵向截面示意图;
21.图3为本发明的a部分放大图;
22.图4为本发明的b部分放大图;
23.图5为本发明的c部分放大图;
24.图6为本发明的d部分放大图。
25.图中:1固定框、2运输框体、3支架、4激光雷达、5电动升降杆、6活动挡板、7红外传感器、8深度摄像头、9毫米波雷达、10驱动装置、11安放槽、12阻隔槽、13压力板、14驱动箱、15闭合板、16活塞杆、17第一弹簧、18第一连接杆、19清洁袋、20齿条、21第二弹簧、22圆环、23连接轮、24贯穿腔、25阻隔板、26传动箱、27传动板、28锁定杆、29第二连接杆、30套筒、31齿轮、32卡块、33传动杆、34机械臂、35摄像头。
具体实施方式
26.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
27.参照图1
‑
6,一种机场行李搬运机器人,包括搬运框体,搬运框体内部设置有搬运机构、分隔机构与更换机构,搬运机构设置在固定框1的外部,分隔机构与更换机构之间活动连接;
28.搬运机构包括相对设置在固定框1外侧壁上的机械臂34,两个机械臂34的侧壁上均固定安装有摄像头35,通过搬运机构能够行李进行夹持放置,不需要人工进行手动搬运,减少人力劳动;
29.分隔机构包括固定安装有固定框1内部的多个驱动箱14,驱动箱14的内部活动设置有闭合板15,闭合板15与驱动箱14的内部四周紧密贴合,闭合板15的侧壁上固定连接有活塞杆16,活塞杆16由驱动箱14的内部贯穿至驱动箱14的外部,固定框1的侧壁上开设有多个的安放槽11,每个驱动箱14与每个安放槽11相匹配,安放槽11的内部活动设置有压力板13,活塞杆16的远离闭合板15的一端与压力板13的侧壁固定连接,压力板13的侧壁上固定连接有第一弹簧17,第一弹簧17与活塞杆16的侧壁相缠绕,第一弹簧17的材质为弹簧钢,弹簧钢具有高抗拉强度、弹性极限、疲劳强度以及良好的伸缩性,从而在受到外力时通过收缩起到减震作用,第一弹簧17的远离压力板13的一端与驱动箱14的侧壁固定连接,固定框1的内部设置有多个传动箱26,传动箱26的内部活动设置有传动板27,传动板27与传动箱26的内部四周紧密贴合,传动板27的侧壁上固定连接有锁定杆28,锁定杆28由传动箱26的内部贯穿至传动箱26的外部,锁定杆28远离传动板27的一端固定连接有阻隔板25,固定框1的侧壁上开设有多个阻隔槽12,阻隔板25与阻隔槽12的内部侧壁相滑动,通过分隔机构可以实现对行李的分隔,避免对下位乘客的行李进行运输的时候会与其他行李发生碰撞,实现了对行李的保护,减少行李了不必要的损坏;
30.更换机构包括清洁袋19与设置在固定框1的内部侧壁上通过轴承连接的多个第一连接杆18,且第一连接杆18可绕轴承转动,固定框1的内部侧壁上通过轴承连接有多个第二连接杆29,且第二连接杆29可绕轴承转动,第二连接杆29的侧壁上固定安装有套筒30,清洁
袋19的两端分别由固定框1的外部贯穿至固定框1的内部,清洁袋19的两端分别于第一连接杆18和套筒30的侧壁相缠绕,压力板13侧壁上活动设置有齿条20,在齿条20随着压力板13向下运动的过程中由于卡块32与齿轮31想卡紧,从而使得齿轮31无法进行转动,此时齿条20向外转动继续向下移动,但在齿条20向上移动的过程中齿轮31逆时针转动,此时卡块32的端部失去对齿轮31的限制,进而能够对清洁袋19进行移动更换,齿条20与齿轮31相啮合,齿条20的侧壁上固定连接有第二弹簧21,第二弹簧21的末端与压力板13的侧壁固定连接,第二连接杆29的侧壁上固定安装有齿轮31,固定框1的内部活动设置有多个卡块32,卡块32与齿轮31的侧壁相卡紧,固定框1的内部固定安装有圆环22,圆环22的内部活动连接有连接轮23,连接轮23的内部开设有多个贯穿腔24,机械臂34的转轴固定安装有传动杆33,传动杆33与圆环22的侧壁固定连接,驱动箱14的侧壁上通过出油管与圆环22的侧壁固定连接,出油管与贯穿腔24相连通,传动箱26的侧壁上通过进油管与远离出油管一端的圆环22侧壁固定连接,贯穿腔24与进油管相连通,固定框1的侧壁上固定安装有运输框体2,运输框体2的横截面呈坡型,运输框体2的侧壁上固定安装有支架3,支架3的侧壁上固定安装有激光雷达4,固定框1的侧壁上固定安装有深度摄像头8,固定框1的侧壁上固定安装有毫米波雷达9,固定框1远离支架3的侧壁上通过转轴连接有活动挡板6,且活动挡板6可绕转轴转动,固定框1的侧壁上设置有电动升降杆5,电动升降杆5的输出端通过转轴与活动挡板6的侧壁相连接,且电动升降杆5的输出端可绕转轴转动,固定框1的底部设置有驱动装置10,通过更换机构可以实现对清洁袋19的更换,避免上位行李上的灰尘或雨水残留到运输框体2的内部,不需要人工进行清洁,节省了大量的人力与时间,同时也更加卫生环保。
31.本发明中,使用时,激光雷达4、深度摄像头8、毫米波雷达9的配合使用可以对行李的位置与进行确定,便于固定框1移动到行李的附近,当固定框1移动到行李附近时,机械臂34开始转动,当红外传感器7检测的机械臂34转动到固定框1的后方时使得电动升降杆5开始转动,电动升降杆5带动活动挡板6向下转动与地面相抵紧便于对行李进行搬运,摄像头35能够对机械臂34的运动路径进行监控,便于机械臂34能够准确的对行李进行夹持搬运,当机械臂34将行李搬运到运输框体2的上方是,由于运输框体2的表面呈坡型,从而能够使得行李向下滑动,不需要人工对行李进行搬运,减少了大量得固定框1人力劳动;
32.并且由于机械臂34此时位于运输框体2的后方,机械臂34带动传动杆33进行转动,从而使得贯穿腔24不与进油管和出油管相连通,当行李安装好后机械臂34恢复到原位,此时连接轮23在传动杆33的带动下使得进油管与出油管相连通,行李自身的重量会使得压力板13向下移动,压力板13通过活塞杆16使得闭合板15向下,从而对驱动箱14内部的液压油进行挤压,液压油通过出油管进入到贯穿腔24中,再通过进油管进入到传动箱26中,进而使得传动板27向上移动,传动板27带动锁定杆28向上移动,锁定杆28使得阻隔板25向上移动实现对行李的分隔,避免对下位乘客的行李进行运输的时候会与其他行李发生碰撞,实现了对行李的保护,并且行李会在放置在安放槽11的内部,也减少了行李的晃动;
33.在对行李进行运输的过程中,通过激光雷达4、深度摄像头8、毫米波雷达9可以对周围的行人以及障碍物进行识别,避免对行人造成冲撞,当固定框1将行李运输到机场出口或者登机处时,将行李取下,此时在第一弹簧17自身的弹力作用下压力板13会向上运动,压力板13带动齿条20向上运动,由于齿条20与齿轮31相啮合,并且齿轮31此时逆时针转动卡块32无法对齿轮31实现卡紧,从而使得第二连接杆29开始转动,第二连接杆29带动套筒30
开始转动,进而对清洁袋19进行缠绕,实现对清洁袋19的更换,避免上位行李上的灰尘或雨水残留到运输框体2的内部,不需要人工进行清洁,节省了大量的人力与时间,同时也更加卫生环保。
34.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1