一种无线遥控叉车系统
1.本发明涉及工业控制领域,特别是涉及一种无线遥控叉车系统。
背景技术:
2.叉车本体作为常用的运输设备,其在大型仓库、港口、车间等各种运输场合中发挥着重要的作用。
3.目前,在无线控制叉车本体方面方面,有传统的遥控器操控和程序控制,用遥控器操控时,无法实时反映叉车本体当前的运行状态,无法与叉车本体实现信息交互的功能,而传统的程序控制,开发难度大,且叉车本体控制的灵活性不高。
技术实现要素:
4.本发明的目的是提供一种无线遥控叉车系统,提高了叉车本体控制的灵活性。
5.为实现上述目的,本发明提供了如下方案:
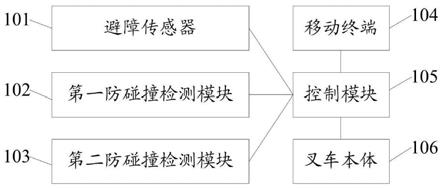
6.一种无线遥控叉车系统,包括控制模块、避障传感器、第一防碰撞检测模块、第二防碰撞检测模块、移动终端和叉车本体;
7.所述避障传感器设置在所述叉车本体的货叉尾部,所述避障传感器用于检测货叉尾部的第一设定范围内的障碍物,并将第一检测信号发送到所述控制模块;
8.所述第一防碰撞检测模块设置在所述叉车本体头部的下方,所述第一防碰撞检测模块用于检测所述叉车本体头部下方的第二设定范围内的障碍物,并将第二检测信号发送到所述控制模块;
9.所述第二防碰撞检测模块设置在所述叉车本体头部的上方,所述第二防碰撞检测模块用于检测所述叉车本体头部上方的第三设定范围内的障碍物,并将第三检测信号发送到所述控制模块;
10.所述控制模块用于接收所述移动终端的控制指令,根据所述第一检测信号、第二检测信号、第三检测信号和所述移动终端的控制指令对所述叉车本体进行运动控制。
11.可选地,所述控制模块为stm32单片机。
12.可选地,所述移动终端为基于安卓系统的移动终端。
13.可选地,所述叉车本体包括驱动器和运动电机,所述驱动器与所述控制模块电连接,所述驱动器用于根据所述控制模块的发送的控制指令驱动所述运动电机,所述运动电机用于驱动所述叉车本体的车轮运动。
14.可选地,所述移动终端包括操作界面,所述操作界面上设置有滑动圆盘,通过触摸所述滑动圆盘控制所述叉车本体左轮和右轮的速度,左轮的速度正比于触控点到圆心的距离,右轮的速度正比于触控点纵坐标的坐标值,所述滑动圆盘的圆心为坐标原点。
15.可选地,所述叉车本体包括蓄电池,用于为所述控制模块、所述避障传感器、所述第一防碰撞检测模块、所述第二防碰撞检测模块和所述叉车本体提供电能。
16.可选地,所述叉车本体包括充电开关,所述充电开关分别与所述蓄电池和所述控
制模块连接,所述充电开关用于控制所述蓄电池充电的开启和关闭,所述控制模块根据所述移动终端的控制指令控制所述充电开关的开闭。
17.可选地,还包括手动急停开关,所述手动急停开关设置在所述叉车本体上,用于手动控制所述叉车本体的停止。
18.可选地,所述第二防碰撞检测模块为激光扫描仪。
19.可选地,所述叉车本体包括升降电机,所述升降电机与所述控制模块电连接,所述升降电机用于根据所述控制模块发送的控制指令驱动所述货叉的升降。
20.根据本发明提供的具体实施例,本发明公开了以下技术效果:
21.本发明通过避障传感器、第一防碰撞检测模块和第二防碰撞检测模块获得叉车本体周围的环境信号,控制模块根据环境信号和移动终端的控制指令控制叉车本体的运动,提高了叉车本体控制的灵活性。
附图说明
22.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
23.图1为本发明一种无线遥控叉车系统结构示意图;
24.图2为本发明一种无线遥控叉车系统信息结构示意图;
25.图3为本发明一种无线遥控叉车系统中各部件安装位置示意图;
26.图4为本发明一种无线遥控叉车系统工作逻辑流程示意图;
27.图5为本发明一种无线遥控叉车系统中电气原理示意图;
28.图6为本发明一种无线遥控叉车系统中移动终端上操作界面像素坐标与速度关系转换原理图;
29.图7为本发明一种无线遥控叉车系统中移动终端上安卓软件界面设计图;
30.图8为本发明一种无线遥控叉车系统电路原理图。
具体实施方式
31.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
32.本发明的目的是提供一种无线遥控叉车系统,提高了叉车本体控制的灵活性。
33.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
34.图1和图2为本发明一种无线遥控叉车系统结构示意图,如图1
‑
2所示,一种无线遥控叉车系统,包括控制模块、避障传感器101、第一防碰撞检测模块102、第二防碰撞检测模块103、移动终端104和叉车本体106。
35.所述避障传感器101设置在所述叉车本体106的货叉尾部,所述避障传感器101用
于检测货叉尾部的第一设定范围内的障碍物,并将第一检测信号发送到所述控制模块105。其中,货叉尾部是指货叉远离叉车本体106头部方向的末尾。图2中托盘升降电机用于控制托盘的升降,此处托盘即为货叉。
36.作为具体实施例,避障传感器101数量为2,分别为第一避障传感器和第二避障传感器,分别设置在两个货叉尾部。
37.所述第一防碰撞检测模块102设置在所述叉车本体106头部的下方,所述第一防碰撞检测模块102用于检测所述叉车本体106头部下方的第二设定范围内的障碍物,并将第二检测信号发送到所述控制模块105。
38.所述第二防碰撞检测模块103设置在所述叉车本体106头部的上方,所述第二防碰撞检测模块103用于检测所述叉车本体106头部上方的第三设定范围内的障碍物,并将第三检测信号发送到所述控制模块105。
39.所述控制模块105用于接收所述移动终端104的控制指令,根据所述第一检测信号、第二检测信号、第三检测信号和所述移动终端104的控制指令对所述叉车本体106进行运动控制。
40.第一检测信号、第二检测信号和第三检测信号的优先级高于所述移动终端104发出的控制指令的优先级。当所述控制模块105在接收到第一检测信号、第二检测信号和第三检测信号的同时接收到所述移动终端104的控制指令时,控制模块105优先处理第一检测信号、第二检测信号和第三检测信号。
41.所述控制模块105为stm32单片机。
42.所述移动终端104为基于安卓系统的移动终端。
43.所述叉车本体106包括驱动器和运动电机,所述驱动器与所述控制模块105电连接,所述驱动器用于根据所述控制模块105的发送的控制指令驱动所述运动电机,所述运动电机用于驱动所述叉车本体106的车轮运动。
44.驱动器为伺服驱动器,运动电机为伺服电机。
45.作为具体实施例驱动器为德马克伺服驱动器。
46.所述移动终端104包括操作界面,所述操作界面上设置有滑动圆盘,通过触摸所述滑动圆盘控制所述叉车本体106左轮和右轮的速度,左轮的速度正比于触控点到圆心的距离,右轮的速度正比于触控点纵坐标的坐标值,所述滑动圆盘的圆心为坐标原点。坐标的第一象限对应于向右前进,坐标的第二象限对应于向左前进,坐标的第三象限对应于向左后退,坐标的第四象限对应于向右后退。
47.所述叉车本体106包括蓄电池,用于为所述控制模块105、所述避障传感器101、所述第一防碰撞检测模块102、所述第二防碰撞检测模块103和所述叉车本体106提供电能。
48.所述叉车本体106还包括充电开关,所述充电开关分别与所述蓄电池和所述控制模块105连接,所述充电开关用于控制所述蓄电池充电的开启和关闭,所述控制模块105根据所述移动终端104的控制指令控制所述充电开关的开闭。
49.一种无线遥控叉车系统还包括手动急停开关,所述手动急停开关设置在所述叉车本体106上,用于手动控制所述叉车本体106的停止。
50.所述第二防碰撞检测模块103为激光扫描仪。
51.所述第一防碰撞检测模块102为碰撞检测传感器,设置在叉车本体106头部的下方
的防撞胶条内部。
52.所述叉车本体106包括升降电机,所述升降电机与所述控制模块105电连接,所述升降电机用于根据所述控制模块105的发送的控制指令驱动所述货叉的升降。
53.下面详细说明本发明一种无线遥控叉车系统,包括:控制模块、传感器信息处理模块、托板控制模块、电机驱动模块(驱动器)、报警模块、充电模块、通讯模块和移动终端104,移动终端104包括信息交互模块,信息交互模块为基于安卓系统的安卓app。
54.采用基于windows操作系统和qt平台开发的安卓app,实现对无人叉车的控制,传感器信息处理模块主要采集周围障碍物的信息,包括叉车前部的碰撞检测传感器(第一防碰撞检测模块102)、叉尖红外传感器(避障传感器101)和叉车头部的激光扫描仪,这几个传感器相当于人的感官,在周围出现障碍物时,会发出数字信号。报警模块与控制模块105电连接,报警模块根据传感器信息处理模块(避障传感器101、第一防碰撞检测模块102和第二防碰撞检测模块103)发送的信号以及移动终端104发送的信号,及时的报警,例如:控制模块与遥控平板断线时会报警。报警模块包括报警灯。
55.控制模块105作为无人叉车的大脑,控制着所有信号的处理。电机驱动模块和充电模块等作为执行单元,充电模块包括蓄电池,信息交互模块用于实时显示当前叉车的具体信息,当前叉车的具体信息包括速度以及当前开关量的状态。
56.作为具体实施例,控制模块105为stm32f107vct6单片机。
57.叉车本体106为基于安卓和stm32的遥控电动叉车。基于安卓和stm32的遥控电动叉车包括无线控制、充电控制、主动避障、实时通讯检测、托板控制模块和速度检测模块等,其中叉车的芯片采用stm32f107vct6单片机组成最小系统,结合碰撞检测传感器、激光扫描仪、叉尖红外传感器、报警灯、手动急停开关、电机驱动模块、4g路由器、充电控制模块、托板控制模块、无线通讯模块进行设计。实现具有无线遥控、断线报警、远程控制充电、显示叉车当前状态信息、主动避障、远程搬运等功能的无线遥控叉车系统。托板控制模块接收控制模块105的控制命令,驱动托板(货叉)的上升和下降。
58.本系统采用的硬件配置如下:
59.(1)stm32f107vct6控制板1块;
60.(2)急停开关2个;
61.(3)报警灯1个;
62.(4)德马克伺服驱动器和电机1套;
63.(5)串口服务器1个;
64.(6)叉尖红外传感器两个;
65.(7)激光扫描仪1个;
66.(8)碰撞检测传感器1个;
67.(9)安卓平板1个。
68.两个急停开关(手动急停开关)分别放置在叉车车头顶部的左右两侧,以方便从左右两侧都能按下手动急停开关。
69.本发明采用tcp/ip协议连接安卓平板(移动终端104)和串口服务器,通过串口通信连接串口服务器和stm32,根据图7所示,安卓平板可以通过按键或者滑动圆盘的方式发送一系列字符串指令,控制叉车的运动。当控制指令通过滑动圆盘发送时,程序会将当前坐
标点与滑动圆盘的中心坐标的转换为左右轮的速度,并以“r xx lyy”的格式发送至stm32,yy表示左轮的速度,xx代表右轮的速度,速度保留两位小数,通过左右轮的速度差可以实现转弯功能,串口服务器接收到速度数据后,将速度数据转换为串口数据,同时发送给stm32。stm32首先对速度数据进行校验,确定数据类型,当接收到的数据为控制移动类型时,stm32解析两轮的线速度,随后,将两轮的速度根据电机脉冲数和车轮半径转换为4字节16进制数据,与功能码、地址索引和子地址索引组成8字节can报文发送给驱动器,最后由驱动器控制运动电机转动。
70.当按下上升按钮时,安卓平板发送“pleaserisethecc”ascii数据,stm32确定为功能指令后,调用功能控制函数,控制托板上升,数字接口变为高电平,从而实现托起货物的功能,然后通过串口向安卓平板发送“ccisrisenow”数据,安卓平板接收到该信息后会在软件界面中提示托板正在上升。若释放上升按钮,则会发送“keepingrisehigh”保持高度信号,控制托板上升的接口变为低电平信号,同时返回“hightkeepingnow”信号,实现信息的交互。下降按钮与上升按钮的逻辑相同。
71.为了避免控制托板升降的电机因为长时间按住上升按钮而出现损坏,本发明也设计了上升到位开关和下降到位开关,当托板上升到最高点或下降到最低点时,运动电机将不再作用。
72.当按下充电按钮时,安卓平板会通过弹窗进行操作确认,确认后会发送“chargingvechile”ascii数据,stm32确定为功能指令后,调用功能控制函数,改变充电数字接口的电平,从而实现远程控制充电的功能。同时,通过串口向安卓平板发送“ischargenow”数据,安卓平板接收到该信息后会在软件界面中提示充电接口打开。关闭充电接口的逻辑同理。
73.stm32的数字信号输入端分为叉尖避障传感器101、激光扫描仪、碰撞检测传感器和手动急停开关的输入端。
74.叉尖避障传感器101安装在托盘尾部位置,当检测到障碍物且叉车正向障碍物方向移动时,stm32接收到叉尖避障传感器101的电平信号变化,会立即停车报警。激光扫描仪安装在叉车顶部位置,作用是提前发现障碍物,并主动减速停车,当距离障碍物一米以内时,激光扫描仪的减速信号变为高电平,stm32会主动将解析出来的速度减半同时打开报警灯,当距离障碍物0.2m以内时,激光扫描仪的停车信号变为高电平,此时叉车无法在靠近障碍物,只能通过倒车的方式避开障碍物。碰撞检测传感器安装在叉车头部下方的防撞胶条内,在叉车向前移动的过程中,若遇到如石头等较矮的障碍物时,激光扫描仪无法检测到,就会发生危险,因此,碰撞检测传感器在触碰到障碍物时,压力变化会引起接口的电平变化,stm32在主动发送停车指令并报警。上述三种传感器信号的优先级均高于安卓平板(移动终端104)所发出控制指令。
75.本发明的控制逻辑流程如图4所示。首先,设置安卓平板的ip地址并打开软件,服务器会自动开启监听功能,设置在叉车上stm32的会主动连接服务器。连接建立后,安卓平板与stm32开始相互发送心跳包,若前后心跳包接收间隔小于3s,表示该区域的无线信号良好,能够进行稳定的无线遥控。最后,stm32根据安卓平板发送的指令进行解析,控制叉车进行一系列操作。
76.当收到心跳指令时,stm32会返回给遥控平板(安卓平板)一个心跳指令,遥控平板
会计算前后两个心跳指令的时间间隔,用于确认当前网络状态是否畅通,若3s内未接收到返回指令,则遥控平板界面会提示网络信号较差,叉车同时会停止所有动作并报警。
77.当收到运动控制指令时,stm32会根据指令解析出两轮的速度,并根据激光扫描仪判断当前位置与障碍物之间的距离,若距离小于1m且大于0.2m,激光扫描仪会输出减速信号,若叉车防撞橡胶处无碰撞且叉尖区域无障碍物,stm32会将解析出的速度信息减半,最后将处理后的速度根据电机脉冲数和车轮半径转换为4字节16进制数据,与功能码、地址索引和子地址索引组成8字节can报文发送给电机驱动器,最后由电机驱动器控制运动电机转动,同时打开报警灯。若距离小于0.2m,激光扫描仪会输出停车信号,此时由stm32直接发送停车信号并报警。若距离大于1m,叉车防撞橡胶处无碰撞且叉尖区域无障碍物,则按照解析出的速度控制叉车运动。叉尖避障传感器101安装在托盘尾部位置,当检测到障碍物且叉车正向障碍物方向移动时,stm32接收到该传感器的电平信号变化,会立即停车报警。碰撞检测传感器安装在叉车头部下方的防撞胶条内,在叉车向前移动的过程中,若遇到如石头等较矮的障碍物时,激光扫描仪无法检测到,就会发生危险,因此,碰撞检测传感器在触碰到障碍物时,压力变化会引起接口的电平变化,stm32在主动发送停车指令并报警。
78.若是充电指令,stm32控制do3输出高电平,继电器常开触点接通,相当于充电开关,通过继电器实现小电流控制大电流,接通电源线和蓄电池充电线,蓄电池开始充电,充电开关打开后返回遥控平板充电成功指令;若是充电取消指令,stm32控制do3输出低电平,充电开关断开,同时返回遥控平板充电结束指令。
79.若是托板上升指令,且托板没有到达上限位开关,stm32控制do1输出高电平,利用继电器开关特性,通过继电器控制电机转动带动托板上升,实现托板上升功能,在托板上升过程中,若接收到托板保持高度信号,则将do1输出低电平,使托板保持当前高度。若是托板下降指令,且托板没有到达下限位开关,stm32控制do2输出高电平,实现托板下降功能,同时返回托板下降信息给遥控平板。在托板下降过程中,若接收到托板保持高度信号,则将引脚do2输出低电平,使托板保持当前高度。
80.本发明通过一路带光电隔离的can总线接口连接左右轮的伺服电机驱动器,一路带光电隔离的rs232接口连接串口服务器,以及多路带光电隔离数字输出和数字输入实现对叉车的远程控制,其中还内置独立看门狗,确保程序不跑飞。外部电路的电气原理图如图5所示。图5中gb+表示蓄电池充电时的正极,gb
‑
表示蓄电池充电时的负极,b+表示蓄电池放电时的正极,b
‑
表示蓄电池放电时的负极。
81.电路原理图如图8所示,如图8所示,rs
‑
232电平转换芯片采用sp3232een芯片,3.3v供电电压,具有120kbps传输率,sp3232een芯片上的r2out和t2in引脚分别对应ttl/ccmos接收器输出和ttl/ccmos驱动器输入,与stm32的pb7和pb6引脚相连接。t2out和r2in引脚分别对应rs232驱动器输出和ttl/ccmos接收器输入,将通信功能引脚tx1与rx1与串口服务器中的rs232接口相连接,通信功能引脚tx1与sp3232een芯片上的t2out引脚连接,通信功能引脚rx1与sp3232een芯片上的r2in引脚连接。串口波特率为115200bit/s,8bit数据位,1bit停止位。利用串口服务器中的透明传输功能实现rs
‑
232串口数据和网络数据双向转换。首先,在串口服务器设置中,将工作模式设置为sta模式。其次,连接与遥控平板相同的无线局域网。最后,选择tcp/ip通讯客户端模式,设置对应服务器ip地址和端口号。重启串口服务器数秒后,会主动建立连接。当串口服务器断开连接时,会主动发起连接请求,直
到连接成功。
82.stm32芯片控制di1根据手动紧急开关发出的信号控制叉车停车,控制di4根据第一避障传感器检测到的信号控制叉车运动,控制di5根据第二避障传感器检测到的信号控制叉车运动,控制di2根据激光扫描仪检测到的信号控制叉车停车,控制di3根据激光扫描仪检测到的信号控制叉车避障。
83.本发明采用can_bus实现stm32与德马克伺服驱动器的通信。设置左右轮驱动器的地址与波特率后,stm32可以通过指令来启动、关闭驱动器。can收发器采用pca80c250芯片,为了进一步提高抗干扰能力,采用6n137单通道的高速光耦合器实现光电隔离,提高了系统的安全性,为了防止can收发器在高速和容错网络受到瞬态电压,采用nup2105l芯片实现静电防护的功能。
84.为了避免控制托板升降电机因为遥控平板长时间按住上升键或下降键而出现损坏,本发明也设计了上升到位开关和下降到位开关,当托板上升到最高点或下降到最低点时,托板升降电机将不再作用。
85.stm32的数字输入端和数字输出端都采用光电隔离的方式,输入端与输出端之间实现了电气隔离,对于输入的电信号和输出的电信号具有良好的隔离作用,可以有效的减少随机噪声对信号的影响电路。其中eout1连接stm32引脚pe8,do1连接外部电路。edin1连接引脚pd14,di1接收外部输入信号。
86.作为具体实施例,stm32采用浮空输入和开漏输出模式。
87.本发明通过qt设计了一个自定义圆盘控件,可以对叉车进行灵活的控制,效果图如图7所示。根据当前触控点的像素与操控盘圆心点的相对坐标,控制左右轮的速度。左轮的速度正比于触控点和圆心的距离,右轮的速度正比于触控点的y坐标值。遥控界面的四个象限分别对应于向右前进、向左前进、向左后退、向右后退等四种操控方式。第一象限内左右轮的速度计算公式如下所示:
[0088][0089][0090]
其中,speed
max
表示叉车运行的最大速度,(point
x
,point
y
)表示当前触控点的像素坐标,(point
intx
,point
inity
)表示操控盘圆心的像素坐标,r表示圆盘半径。遥控屏幕中圆盘像素坐标如图6所示,右上方定义为第一象限,以方便操作人员控制。其他象限逆时针分布。
[0091]
采用上述技术方案的基于安卓和stm32的遥控叉车系统具有以下优点,采用stm32作为遥控叉车的运动控制核心,降低了开发难度和成本、且心跳机制和各类避障传感器保证了叉车运动时安全性、安卓设备上开发的自定义控件,降低了操作难度,提高了叉车的灵活性。
[0092]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
[0093]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说
明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1