一种基于图像识别的插纱机器人用纺织纱筒调头装置的制作方法
1.本发明属于纺织技术领域,尤其涉及一种基于图像识别的插纱机器人用纺织纱筒调头装置。
背景技术:
2.在纺织时用人最多的是纺纱工序,且纺纱工艺用人较多的分别是环锭纺(俗称“细纱”)工序和络筒工序,且络筒工序一般需要进行插纱处理。
3.中国专利文献cn211733457u公开了一种插纱机器人,该插纱机器人包括:吸线装置,安装在络筒机的上,用于固定放入络筒机纱库的管纱的线头;整理装置,用于整理管纱,使管纱的大小头按照设定方式排布;抓取投放装置,用于抓取经所述整理装置整理的管纱,以将管纱放入纱库,同时,与所述吸线装置配合,以便使所述吸线装置固定管纱的线头。该实用新型提供的插纱机器人,在使用时,吸线装置安装在络筒机上,抓取投放装置抓取经过整理装置整理的管纱后,将该管纱移送放置在络筒机的纱库内,但在实际使用时,仍存在一定的缺陷,一般采用自动上料机械臂实现对纱筒的抓取处理调节,但在实际操作时纱筒缺乏对定位找准能力,影响到对插纱工艺的处理能力,不能很好的满足纺织纱筒调头处理需要。本发明装置主要是配合五轴scara机械手来完成调头功能,目的是让五轴机械手在纱框内完成抓纱后直接送到调头机构(该调头机构的位置的正下方也是机器人平台管纱放置的第一位置),让调头机构来完成纱管的大小头判断和执行相关调头等调整功能,这套装置的最大意义就是提高机械手的抓纱效率,让五轴抓纱机器手的行走轨迹从本来的a点(抓纱位置)到b点(判断大小头的位置)再到c点(纱管最终到达的位置,机器人放纱位置)缩短至a点直接到c点),分解了机器手的工作节奏,在拥有这套装置的条件下,可以让机械手提高30%的抓纱效率。
技术实现要素:
4.本发明的目的在于:为了解决纱筒缺乏对定位找准能力,影响到对称找头的处理能力,不能很好的满足纺织纱筒调头处理的问题,而提出的一种基于图像识别的插纱机器人用纺织纱筒调头装置。
5.为了实现上述目的,本发明采用了如下技术方案:
6.一种基于图像识别的插纱机器人用纺织纱筒调头装置,包括支撑架,所述支撑架一侧固定安装有调头旋转装置,所述调头旋转装置外侧一侧设有相机(5),且相机设于外部生产机器人一侧,且调头旋转装置一侧固定安装有抓取机构,所述抓取机构活动连接有纱筒主体,所述支撑架一侧底部固定连接有漏斗开合机构,所述漏斗开合机构一侧活动连接有导向漏斗,且导向漏斗位于纱筒主体底部一侧,且纱筒主体底部固定连接有纱筒座。
7.作为上述技术方案的进一步描述:
8.所述调头旋转装置包括角度电机,所述角度电机固定连接在支撑架内腔,所述角度电机一侧设有限位块,所述限位块一侧外侧壁套设有固定架,所述固定架两侧与两侧抓
取机构一侧固定连接,且固定架一侧与相机一侧固定连接。
9.作为上述技术方案的进一步描述:
10.所述抓取机构包括夹爪气缸,所述夹爪气缸固定连接在固定架一侧,且固定架与夹爪气缸之间设有轴承,所述夹爪气缸一侧活塞杆一端固定连接有夹爪,所述夹爪横截面形状为u形,且夹爪一侧与纱筒主体外侧壁固定连接。
11.作为上述技术方案的进一步描述:
12.所述导向漏斗包括套筒主体,所述套筒主体顶部固定连接有导入罩,所述套筒主体底部固定连接有导出罩。
13.作为上述技术方案的进一步描述:
14.所述导向漏斗为硬质塑胶构件。
15.作为上述技术方案的进一步描述:
16.所述漏斗开合机构包括旋转气缸,所述旋转气缸通过安装板固定连接在固定架一侧,所述旋转气缸输出轴传动连接有夹持套,且夹持套与导向漏斗外部相套接。
17.作为上述技术方案的进一步描述:
18.所述旋转气缸输出轴固定连接有主动齿轮,且主动齿轮两侧均啮合有从动齿轮,且从动齿轮顶部通过轴体固定连接有夹持套。
19.作为上述技术方案的进一步描述:
20.所述夹持套横截面形状为l形,且夹持套末端与导向漏斗一侧固定连接。
21.综上所述,由于采用了上述技术方案,本发明的有益效果是:
22.1、本发明中,将运送来的纱筒主体通过夹爪气缸驱动夹爪夹紧后由相机判断纱筒主体的大小头方向,通过调头旋转装置的角度电机带动固定架调节纱筒主体旋转到指定的方向,导向漏斗此时在旋转开合机构作用下,漏斗闭合,使纱筒通过导向漏斗准确落入纱筒座中,纱筒座的正下方有纱管托盘等待,达到纱筒准确插在托盘上。
23.2、本发明中,通过设计的漏斗开合机构,旋转气缸能够通过顶部主动齿轮带动从动齿轮转动,从动齿轮转动带动进行啮合转动,进而能够实现对一侧夹持套的偏移适配,使得夹持套向中间靠近,两侧半圆形的夹持套贴合后行成导向通道,进而能够与偏转后的纱筒主体进行贴合支撑,达到导向目的。
24.3、本发明中,通过设计的导向漏斗,实现对顶部落入纱筒主体的限位导入以及精准落出,实现对落入纱筒主体的导向调节,并且能够通过驱动机构向两侧展开,避免影响到对纱筒主体的转向调节。
附图说明
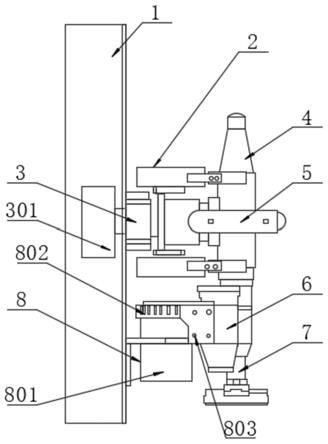
25.图1为本发明提出的一种基于图像识别的插纱机器人用纺织纱筒调头装置的正视结构示意图;
26.图2为本发明提出的一种基于图像识别的插纱机器人用纺织纱筒调头装置的俯视结构示意图;
27.图3为本发明提出的一种基于图像识别的插纱机器人用纺织纱筒调头装置的调头旋转机构侧视结构示意图;
28.图4为本发明提出的一种基于图像识别的插纱机器人用纺织纱筒调头装置的漏斗
开合机构侧视剖面结构示意图;
29.图5为本发明提出的一种基于图像识别的插纱机器人用纺织纱筒调头装置的漏斗开合机构部分俯视结构示意图。
30.图例说明:
31.1、支撑架;2、抓取机构;201、夹爪气缸;202、连接杆;203、夹爪;3、调头旋转装置;301、角度电机;302、限位块;303、固定架;4、纱筒主体;5、相机;6、导向漏斗;7、纱筒座;8、漏斗开合机构;801、旋转气缸;802、从动齿轮;803、夹持套。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
33.请参阅图1
‑
5,本发明提供一种技术方案:一种基于图像识别的插纱机器人用纺织纱筒调头装置,包括支撑架1,所述支撑架1一侧固定安装有调头旋转装置3,所述调头旋转装置3外侧一侧设有相机5,且相机5设于外部生产机器人一侧,且调头旋转装置3一侧固定安装有抓取机构2,所述抓取机构2活动连接有纱筒主体4,所述支撑架1一侧底部固定连接有漏斗开合机构8,所述漏斗开合机构8一侧活动连接有导向漏斗6,且导向漏斗6位于纱筒主体4底部一侧,且纱筒主体4底部固定连接有纱筒座7,所述调头旋转装置3包括角度电机301,所述角度电机301固定连接在支撑架1内腔,所述角度电机301一侧设有限位块302,所述限位块302一侧外侧壁套设有固定架303,所述固定架303两侧与两侧抓取机构2一侧固定连接,且固定架303一侧与相机5一侧固定连接。
34.实施方式具体为:相机5能够在机器人一侧观察调头旋转装置3内,通过图像识别软件实现对纱筒主体4的相对直径,有利于调节纱筒主体4的朝向位置,并且漏斗开合机构8能够实现对套筒主体601的相对调节作用,继而能够有效避免影响到纱筒主体4的调向,并且固定架303能够通过内部轴向实现对角度电机301调头处理的能力,并且能够通过固定架303与角度电机301固定部的固定实现支撑稳定性形,且夹爪气缸201能够通过连接杆202带动夹爪203夹持稳定性,方便控制调节收放。
35.所述抓取机构2包括夹爪气缸201,所述夹爪气缸201固定连接在固定架303一侧,所述夹爪气缸201一侧活塞杆一端有夹爪203,所述夹爪203横截面形状为u形,且固定架303与夹爪气缸201之间设有轴承,且夹爪203一侧与纱筒主体4外侧壁固定连接,所述导向漏斗6为硬质塑胶构件。
36.实施方式具体为:能够保证滑入固定需要,避免影响道纱筒主体4的落入需要。
37.所述漏斗开合机构8包括旋转气缸801,所述旋转气缸801通过安装板固定连接在固定架303一侧,所述旋转气缸801输出轴传动连接有夹持套803,且夹持套803与导向漏斗6外部相套接,所述旋转气缸801输出轴固定连接有主动齿轮,且主动齿轮两侧均啮合有从动齿轮802,且从动齿轮802顶部通过轴体固定连接有夹持套803,且夹持套803横截面形状为l形,且夹持套803末端与导向漏斗6一侧固定连接。
38.工作原理:使用时,通过设计的相机5判断纱筒的大小头,正常是大头在下小头在
上,如果机械臂抓取的纱筒小头在下的话相机5会指令机械手180度旋转到正确位置,漏斗与纱筒的大小是相符的,由漏斗引导纱筒通过自身重力自由准确的落入纱筒座7中。
39.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1