GIL管廊内六氟化硫气体快速回收设备自装卸自行走的方法与流程
gil管廊内六氟化硫气体快速回收设备自装卸自行走的方法
技术领域
1.本发明属于气体绝缘输电线路维护技术领域,具体涉及gil管廊内六氟化硫气体快速回收设备自装卸自行走的方法。
背景技术:
2.目前,gil中六氟化硫气体回收设备采用回收与储存分离设计,便于设备运输,设备在地面时,可通过吊装设备辅助装卸,可在管廊底部,设备的吊装不易实现;而gil设备故障抢修时六氟化硫回收装置的运输主要有两种形式,一种是车载式大型六氟化硫回收设备通过gil管廊坡道进入管廊内部故障点工作,另一种是通过地面站吊装口吊装六氟化硫回收装置进入管廊内部,人员推动至管廊内部故障点工作。
3.车载式六氟化硫回收装置主要依靠坡道进入工作场所,但是依据gil管廊安全设计,坡道需要封死,将无法应用,因此已不做考虑。通过吊装口运输的六氟化硫回收装置主要存在以下问题:一是在管廊内部移动主要通过人员推动来实现,不仅耗费较多人力,而且由于gil管廊整体为坡面,一旦推动失误,极有可能碰撞gil设备或人员,产生gil设备故障及其他未知故障。
4.因此需要研究gil管廊工程应急抢修中sf6气体回收装置管廊内装载和运输技术,提高gil设备应急抢修速率及质量。
技术实现要素:
5.本发明针对上述背景技术中的缺陷,提供gil管廊内六氟化硫气体快速回收设备自装卸自行走的方法,提高gil设备应急抢修速率及质量。
6.为实现上述目的,本发明采用的技术方案如下: gil管廊内六氟化硫气体回收设备自装卸自行走的方法,包括以下步骤:s1、采用自动装卸机构将回收设备装载至电动搬运设备上,完成回收设备装车运输;s2、电动搬运设备在gil管廊内的轨道上行驶,完成回收设备前后自由移动;其中电动搬运设备在轨道上行驶行驶方向是双向的;s3、回收设备运输到目的地后,再次采用自动装卸机构将回收设备从电动搬运设备上卸载下来,完成回收设备的装卸运输作业。
7.进一步地,所述自动装卸机构包括:架体,其上设置有用于驱动支脚横向伸缩的转动机构以及用于驱动支脚纵向升降的液压机构,所述架体的两侧底部分别设置有一组接地平衡机构;转动机构,其包括连接于架体内顶端的盒体,盒体内中心位置设置有齿轮,所述齿轮通过步进电机驱动,所述盒体内前后两侧对称设置有齿条,且所述齿轮的前后两侧分别与两个所述齿条齿合连接,每个所述齿条上分别通过安装杆连接液压机构;液压机构,其包括设置在架体内左、右两侧的一组液压缸以及固定安装于架体顶
部一侧的液压站,所述液压站用于控制所述液压缸,左、右两个所述液压缸分别通过安装杆连接于对应位置的齿条底部,两个所述液压缸底部伸缩端还分别固定连接有竖向升降杆,两个所述竖向升降杆底端分别连接有水平安装架,两个所述水平安装架两端内侧分别连接有驱动回收设备升降的支脚;接地平衡机构,其包括与架体底部转动连接丝杆,所述丝杆的顶端具有手柄,且丝杆的底端具有接地圆盘;所述架体上还固定安装有用于对液压站和步进电机进行供电的蓄电盒一。
8.进一步地,所述架体内顶部两侧分别固定安装有下压滚轮和上拉滚轮,所述下压滚轮与齿条的上边缘转动连接,且上拉滚轮与齿条的下边缘转动连接。
9.进一步地,两个所述齿条分别横向贯穿盒体和架体,且两个所述齿条位于架体外侧的一端皆设有有挡块。
10.进一步地,两个所述液压缸的上、下油口分别通过油管一和油管二与液压站的进、出油口相连接,所述油管一和油管二上分别套装有用于平衡两个所述液压缸油压的液压平衡阀。
11.进一步地,所述步进电机安装于架体顶部,步进电机的底部输出端贯穿盒体并与齿轮的固定连接。
12.进一步地,所述电动搬运设备包括:平板架,用于搭载回收设备,平板架的前端安装有转轴,转轴上套装有从动齿轮,且转轴两端套装有行走轮,平板架上设置有驱动行走轮转动的驱动机构以及控制驱动机构工作状态的控制机构;平板架的尾端两侧还转动连接有制动轮,还设置有对制动轮进行制动的制动机构,制动机构固定安装于条形槽内,且条形槽开设于平板架尾端顶面;其中,驱动机构包括固定安装于平板架前端一侧的电动机和减速机,所述电动机的输出轴通过联轴器与减速机的输入轴相连接,所述减速机的输出轴套装有驱动齿轮,且驱动齿轮与从动齿轮齿合连接;控制机构,包括电机控制器,其通过安装板安装于平板架的前端,用于控制电动机输出轴的转速和转向;制动机构,包括丝杆机构、套装于丝杆机构两侧外围的一组制动件以及驱动丝杆机构转动的步进电机二,丝杆机构通过轴套转动安装条形槽内。
13.所述安装板的前侧底端还固定安装有用于对电动机和步进电机二供电的蓄电盒二。
14.进一步地,所述丝杆机构包括左旋丝杆、右旋丝杆以及固定安装于两者连接处的从动斜齿轮,所述步进电机二的输出轴套装有驱动斜齿轮,且驱动斜齿轮与从动斜齿轮齿合连接。
15.进一步地,所述制动件包括滑动连接于条形槽内的滑块以及可拆卸安装于滑块上的制动块。
16.有益效果:本发明通过配合使用自动装卸机构和电动搬运设备,自动装卸机构较为低矮,占地面积较小,将回收设备的各模块可自由吊运装载至电动搬运设备上,吊运过程不受管廊
底部高度和面积的限制,并且电动搬运设备还可在管廊内的现有轨道上可变速双向行驶,并适时可以使用制动机构制动制动轮,以完成电动搬运设备的制动停止,方便进行回收设备的各模块的卸载作业,因而整个回收设备的各模块的装载和运输过程平稳性好,安全可靠,省时省力。
附图说明
17.图1为本发明的方法工作流程图;图2为本发明的自动装卸机构结构图;图3为本发明的自动装卸机构的竖向升降杆与水平安装架连接图;图4为本发明自动装卸机构的的盒体内部结构图;图5为本发明的电动搬运设备结构图;图6为本发明的电动搬运设备的驱动齿轮与从动齿轮齿合连接图。
具体实施方式
18.下面结合附图对技术方案的实施作进一步的详细描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
19.如图1~6所示的一种实施例:gil管廊内六氟化硫气体回收设备自装卸自行走的方法,包括以下步骤:s1、采用自动装卸机构将回收设备装载至电动搬运设备上,完成回收设备装车运输;s2、电动搬运设备在gil管廊内的轨道上有序行驶,完成回收设备前后自由移动;s3、回收设备运输到目的地后,再次采用自动装卸机构将回收设备从电动搬运设备上卸载下来,完成回收设备的装卸运输作业。
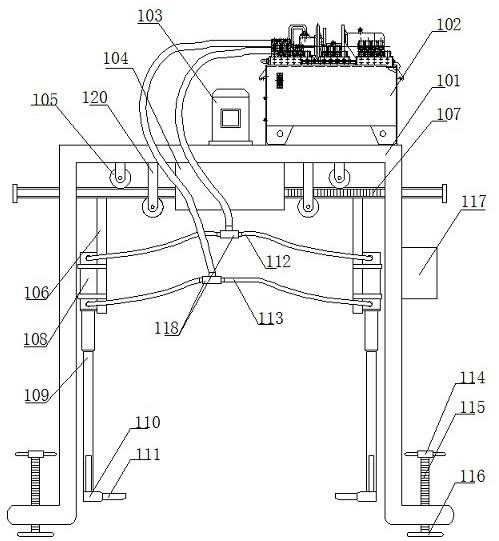
20.所述自动装卸机构包括:架体101,其上设置有用于驱动支脚111横向伸缩的转动机构以及用于驱动支脚111纵向升降的液压机构,所述架体101的两侧底部分别设置有一组接地平衡机构;转动机构,其包括连接于架体101内顶端的盒体104,盒体104内中心位置设置有齿轮119,所述齿轮119通过步进电机103驱动,所述盒体104内前后两侧对称设置有齿条107,且所述齿轮119的前后两侧分别与两个所述齿条107齿合连接,每个所述齿条107上分别通过安装杆106连接液压机构;液压机构,其包括设置在架体101内左、右两侧的一组液压缸108以及固定安装于架体101顶部一侧的液压站102,所述液压站102用于控制所述液压缸108,左、右两个所述液压缸108分别通过安装杆106连接于对应位置的齿条107底部,两个所述液压缸108底部伸缩端还分别固定连接有竖向升降杆109,两个所述竖向升降杆109底端分别连接有水平安装架110,两个所述水平安装架110两端内侧分别连接有驱动回收设备升降的支脚111;接地平衡机构,其包括与架体101底部转动连接丝杆115,所述丝杆115的顶端具有手柄114,且丝杆115的底端具有接地圆盘116;所述架体上还固定安装有用于对液压站和步进电机进行供电的蓄电盒一。
21.所述架体101内顶部两侧分别固定安装有下压滚轮105和上拉滚轮120,所述下压
滚轮105与齿条107的上边缘转动连接,且上拉滚轮120与齿条107的下边缘转动连接。
22.两个所述齿条107分别横向贯穿盒体104和架体101,且两个所述齿条107位于架体101外侧的一端皆设有有挡块。
23.两个所述液压缸108的上、下油口分别通过油管一113和油管二112与液压站102的进、出油口相连接,所述油管一113和油管二112上分别套装有用于平衡两个所述液压缸108油压的液压平衡阀118。
24.所述步进电机103安装于架体101顶部,步进电机103的底部输出端贯穿盒体104并与齿轮119的固定连接。
25.所述电动搬运设备包括:平板架201,用于搭载回收设备,平板架201的前端安装有转轴212,转轴212上套装有从动齿轮206,且转轴212两端套装有行走轮202,平板架201上设置有驱动行走轮202转动的驱动机构以及控制驱动机构工作状态的控制机构;平板架201的尾端两侧还转动连接有制动轮207,还设置有对制动轮207进行制动的制动机构,制动机构固定安装于条形槽208内,且条形槽208开设于平板架201尾端顶面;其中,驱动机构包括固定安装于平板架201前端一侧的电动机204和减速机205,所述电动机204的输出轴通过联轴器与减速机205的输入轴相连接,所述减速机205的输出轴套装有驱动齿轮203,且驱动齿轮203与从动齿轮206齿合连接;控制机构,包括电机控制器214,其通过安装板213安装于平板架201的前端,用于控制电动机204输出轴的转速和转向;制动机构,包括丝杆机构209、套装于丝杆机构209两侧外围的一组制动件211以及驱动丝杆机构209转动的步进电机二210,丝杆机构209通过轴套转动安装条形槽208内。
26.所述安装板的前侧底端还固定安装有用于对电动机和步进电机二供电的蓄电盒二。
27.所述丝杆机构209包括左旋丝杆2092、右旋丝杆2091以及固定安装于两者连接处的从动斜齿轮2093,所述步进电机二210的输出轴套装有驱动斜齿轮216,且驱动斜齿轮216与从动斜齿轮2093齿合连接。
28.所述制动件211包括滑动连接于条形槽208内的滑块2111以及可拆卸安装于滑块2111上的制动块2112。
29.本发明公开了的gil管廊内六氟化硫气体快速回收设备自装卸自行走的方法的工作原理:自动装卸机构吊运装载回收设备各模块的过程:转动机构的步进电机一103正向转动驱动两个齿条107同向移动,以驱动支脚111横向向回收设备各模块的两侧同时伸入,达到电动搬运设备可自由移动的宽度,而后,液压站102可油压驱动两个液压缸108的伸缩杆向上运动,以通过竖向升降杆109提取水平安装架110、支脚111,进而回收设备各模块被升高的支脚111吊运至一定高度,方便电动搬运设备移动至回收设备各模块的正下方,而后,液压站102可油压驱动两个液压缸108的伸缩杆向下运动,以通过竖向升降杆109下放水平安装架110、支脚111,以完成支脚111与回收设备各模块底面的脱离作业,最终六氟化硫回收设备各模块完成在电动搬运设备的平板架201上的装车运输;电动搬运设备运输回收设备各模块的过程:当回收设备各模块装运在电动搬运设
备上时,可使用电机控制器214控制电动机204输出轴的转速和转向,以完成驱动平板架201前端的行走轮202正转或反转,进而完成电动搬运设备在轨道上可变速双向行驶;等到运输到达目的地时,可使用制动机构的步进电机二210驱动丝杆机构209正传,以带动两个制动件211分别向制动轮207处滑动,此时两个制动件211的制动块2112接触制动轮207,进而完成电动搬运设备的制动作业,方便及时平稳驻车进行回收设备各模块卸载作业。
30.自动装卸机构吊运卸载回收设备各模块的过程:转动机构的步进电机一103正向转动驱动两个齿条107同向移动来将支脚111横向向回收设备各模块的两侧同时伸入,达到电动搬运设备可自由移动的宽度,而后支腿111通过与吊运过程同样的液压原理向上支撑,达到一定高度,使得回收设备各模块的底部空间可自由出入电动搬运设备,等到电动搬运设备运动撤离后,液压站102可油压驱动两个液压缸108的伸缩杆向下运动,以通过竖向升降杆109下放水平安装架110、支脚111,此时回收设备各模块被下放至gil管廊地面,而后,转动机构的步进电机一103反向转动驱动两个齿条107反向移动,来驱动支脚111横向向回收设备各模块的两侧同时伸出,最终完成回收设备各模块从电动搬运设备上卸载作业本发明通过配合使用自动装卸机构和电动搬运设备,自动装卸机构较为低矮,占地面积较小,将回收设备的各模块可自由吊运装载至电动搬运设备上,吊运过程不受管廊底部高度和面积的限制,并且电动搬运设备还可在管廊内的现有轨道上可变速双向行驶,并适时可以使用制动机构制动制动轮,以完成电动搬运设备的制动停止,方便进行回收设备的各模块的卸载作业,因而整个回收设备的各模块的装载和运输过程平稳性好,安全可靠,省时省力尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1