一种建筑施工用安全型模板转运装置的制作方法
1.本发明涉及建筑施工设备领域,特别是一种建筑施工用安全型模板转运装置。
背景技术:
2.木模板从生产厂家在生产得我成品模板是成垛包装的,一垛木模板有几十张甚至上百张,在整垛模板在整体搬运过程中采用叉车辅助运输,但工地在实际使用过程中需要根据使用需求再经工人二次分开转运,现阶段转运过程中,二次转运一般使用平车承载,工人将木模板从整垛的模板上一张一张的卸下并放置在平车上,此过程中由于单张模板重量也很大,两人在转运过程中经常由于配合失误造成夹伤工人手的问题,因此现阶段提要一种自动化设备能够帮助工人进行模板的转运,减少工人夹伤现象的发生,传统设备导向装置设置数量多,增加转运设备的重量且转运时影响视线。
技术实现要素:
3.针对上述情况,为克服现有技术之缺陷,本发明提供一种建筑施工用安全型模板转运装置,有效的解决了背景技术中所提出的问题。
4.其解决问题的技术方案包括模板转运车和模板卸载装置,所述模板转运车包括一个推车,推车上设有一个升降平台,升降平台台面的左端设有一个竖向伸出端固定在升降平台上的第一气缸,第一气缸的缸体开后端的前后两侧各固定有一个水平且伸出端朝右的电缸,两个电缸的伸出同步端交替伸缩,第一气缸的左侧固定有一个第二气缸,第二气缸的伸出端贯穿升降平台台面与推车固定连接,第一气缸缸体与第二气缸缸体经气管连接,升降平台整体下降两个模板厚度可使电缸相对与升降平台台面上升一个模板厚度,第一气缸上设有放气阀门;所述模板卸载装置包括前后布置的两个底座,每个底座上转动安装有一个竖向且经步进电机驱动的螺纹杆,每个螺纹杆的左侧设有一个与其平行的导向杆,螺纹杆上旋装有一个横向的支撑架,支撑架与导向杆滑动连接,螺纹杆转动驱动支撑架上下移动,每个支撑架内侧的左右两端各转动安装有一个链轮,两个链轮经链条连接,链条上固定有一个铰耳,铰耳上铰接有一个拨杆,前后两个链条上的拨杆位置始终对应,拨杆的铰接轴上同轴固定有一个可使其复位的卷簧。
5.所述第一气缸的前后两侧各固定有一个水平支杆,电缸固定在对应侧的支杆上。
6.所述同一个支撑架上的两个链轮中,左侧链轮为主动轮,右侧的链轮为被动轮,主动轮经第一电机驱动,两个第一电机同步驱动。
7.所述每个拨杆的下端转动安装有滚轮。
8.所述铰耳在拨杆与模板接触的一侧有挡板,使得拨杆在与模板接触之前为与链条垂直状态。
9.所述两个底座之间经固定杆连接成一个整体。
10.所述步进电机上设有第一控制开关,第一控制开关采用遥控控制并固定在推车
上,短按第一控制开关一次可使步进电机驱动螺纹杆带动支撑架下降一个模板的厚度,长按第一控制开关可使支撑架持续进行向上或向下移动,小推车上设有控制升降平台的第二控制开关,短按第二控制开关可控制升降平台下降两个模板的厚度,长按第二控制开关,可实现升降平台的持续性的向上或向下运动,电缸设有自动开关,升降平台没完成一次升降,两个电缸实现一次交替伸缩。
11.本装置对比传统设备有以下好处:1、本装置中的模板卸载装置中的拨杆与链条采用铰接方式,并在铰接轴上上装有在受到移动力后可扭转的卷簧,实现在两个拨杆同时驱动模板从模板垛上向升降平台上移动时,拨杆能够始终与模板端部接触,当模板被阻挡时,拨杆可扭转并从模板上方滑动,使得整个模板在卸载过程能够有效配合电缸的导向效果。
12.2、两个交替伸出的电缸在左侧形成一个斜坡,并且电缸每次相对升降平台2上升一个模板厚度,使得模板在接触电缸时一端被阻挡时,另一侧还能持续受力最终进行倾斜,使得模板最终以交叉的方式层叠,这样的方式使得每个模板的四个角均能出现一个空间,工人在搬运时能够直接操作,不用再掀起一角经垫手再进行搬运,使得整个搬运过程更加安全。
13.3、由于模板在模板垛上向升降平台上移动时,要是垛上的模板下端面与升降平台上的模板的上端面平齐,因此在移动时要保证升降平台上的模板始终比垛上的模板低一个模板厚度,因此当垛上的模板移动至升降平台上后,升降平台需要下降两个模板厚度,而拨杆只需下降一个厚度即可。
14.4、本装置通过可以升降的第一电缸和第二电缸,使得整个导向装置,缩减成一组,减少本装置的重量同时在运输时不会影响视线。
附图说明
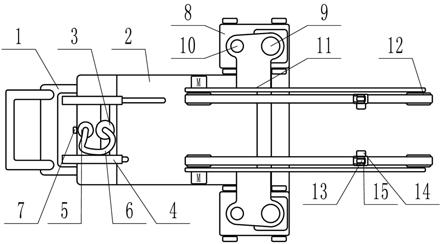
15.图1为本发明主视图。
16.图2为本发明俯视图。
17.图3为本发明模板从垛上转移至升降平台上后的状态变化图。
18.图4为本发明拨杆及其结构示意图。
具体实施方式
19.以下结合附图对本发明的具体实施方式作进一步详细说明。
20.由图1至图4可知,本发明包括模板转运车和模板卸载装置,所述模板转运车包括一个推车1,推车1上设有一个升降平台2,升降平台2台面的左端设有一个竖向伸出端固定在升降平台2上的第一气缸3,第一气缸3的缸体开后端的前后两侧各固定有一个水平且伸出端朝右的电缸4,两个电缸4的伸出同步端交替伸缩,第一气缸3的左侧固定有一个第二气缸5,第二气缸5的伸出端贯穿升降平台2台面与推车1固定连接,第一气缸3缸体与第二气缸5缸体经气管6连接,升降平台2整体下降两个模板厚度可使电缸4相对与升降平台2台面上升一个模板厚度,第一气缸3上设有放气阀门7;所述模板卸载装置包括前后布置的两个底座8,每个底座8上转动安装有一个竖向且经步进电机驱动的螺纹杆9,每个螺纹杆9的左侧设有一个与其平行的导向杆10,螺纹杆9
上旋装有一个横向的支撑架11,支撑架11与导向杆10滑动连接,螺纹杆9转动驱动支撑架11上下移动,每个支撑架11内侧的左右两端各转动安装有一个链轮12,两个链轮12经链条连接,链条上固定有一个铰耳,铰耳上铰接有一个拨杆13,前后两个链条上的拨杆13位置始终对应,拨杆13的铰接轴上同轴固定有一个可使其复位的卷簧14。
21.为了实现两个电缸4的安装,所述第一气缸3的前后两侧各固定有一个水平支杆,电缸4固定在对应侧的支杆上。
22.为了实现链轮12的驱动,所述同一个支撑架11上的两个链轮12中,左侧链轮12为主动轮,右侧的链轮12为被动轮,主动轮经第一电机驱动,两个第一电机同步驱动。
23.为了实现拨杆13在模板上的滑动,所述每个拨杆13的下端转动安装有滚轮15。
24.为了实现卷簧14更好的蓄力,所述铰耳在拨杆13与模板接触的一侧有挡板,使得拨杆13在与模板接触之前为与链条垂直状态。
25.为了实现两个底座8之间的固定,所述两个底座8之间经固定杆连接成一个整体。
26.为了实现更好的驱动,所述步进电机上设有第一控制开关,第一控制开关采用遥控控制并固定在推车1上,短按第一控制开关一次可使步进电机驱动螺纹杆9带动支撑架11下降一个模板的厚度,长按第一控制开关可使支撑架11持续进行向上或向下移动,小推车1上设有控制升降平台2的第二控制开关,短按第二控制开关可控制升降平台2下降两个模板的厚度,长按第二控制开关,可实现升降平台2的持续性的向上或向下运动,电缸4设有自动开关,升降平台2没完成一次升降,两个电缸4实现一次交替伸缩。
27.本发明的具体工作过程:本装置在使用时通过步进电机驱动螺纹杆9转动并使得螺纹杆9带动支撑架11上下移动实现,将模板卸载装置放置在成垛模板的前后两侧,并使底座8置于模板的前后两侧,链轮12中的主动轮置于模板垛的左侧,从动轮置于模板端的右侧,拨杆13可与模板接触,并通过第一控制开关驱动螺纹杆9转动使得支撑架11移动并使得链条的端置于最上端模板的上方,且此时拨杆13可从右侧驱动模板向左移动,推动小车至模板垛的左侧,驱动升降平台2使得升降平台2上升至上端面低于模板垛的一个模板高度,此过程中将放气阀门7打开,并在升降平台2运动到位后将放气阀门7关闭。
28.通过打开第一电机使得第一电机驱动链轮12组转动并使得拨杆13从右侧将模板垛最上端的模板向升降平台2上推动,卷簧14的作用使得在模板未接触到导向杆10时,卷簧14蓄力能够保证拨杆13驱动模板移动,随着拨杆13的驱动,模板逐渐从模板垛上下移至升降平台2上,此时两个电缸4中一个电缸4的伸出端伸出,另一个电缸4的伸出端缩回,在模板被拨杆13推动时并使其左端先接触到伸出端伸出的电缸4,当模板接触到伸出端伸出的电缸4时,此时模板该端部不能再被拨杆13驱动,但拨杆13还要持续运动,此时卷簧14被挤压收卷,使得拨杆13倾斜并使得拨杆13从模板上端划过,滚轮15减少拨杆13下端在模板上的滑动的摩擦力,伸出端未伸出的电缸4此时不与模板接触,因此该侧的拨杆13转动还能驱动模板继续移动,此时原本正放的模板逐渐被电缸4伸出端导向并驱动成倾斜状。
29.完成一个模板从垛上运动至升降平台2上后,通过短按第一控制开关和第二控制开关实现升降平台2下移两个模板厚度,链轮12组下降一个模板厚度实现下一个模板的驱动,在升降平台2升降完成后在自动开关的作用下,原本伸出端伸出的电缸4伸出端回缩,原本伸出端回缩的电缸4伸出端伸出,因此下个模板在升降平台2上的摆放与上一个模板成交叉状,此时两个模板支架的端部都存在一个人手可插入到空间,此时工人搬运更加方便。
30.当升降平台2上移动至足够依次运输的模板后,长按第二驱动开关没使得升降平台2下移,方便推车1的运输,在从推车1上卸载模板时,工人从模板与模板交叉位置所出现的空间对模板进行搬运。
31.本发明构思新颖,结构巧妙,实用性强,本装置通过两个电缸4伸出端的交替伸缩形成的斜坡和拨杆13实现在将垛上的模板转运至升降平台2上时,模板由原来的正放变换成交替放置,使得模板与模板之间的四个角均存在一个可供人手插入的空间,使得整个模板在搬运过程中可有效减少夹伤工人的情况。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1