一种无人天车钢丝绳长度精准测定的方法与流程
1.本发明涉及一种无人天车钢丝绳长度精准测定的方法,属于天车控制方法技术领域。
背景技术:
2.近几年,随着无人天车技术的持续发展。作为无人天车的重要组成,无人天车摆角控制技术和相应理论也得到了空前发展。无人天车钢丝绳长度是无人天车摆角开环控制功能的重要参数,直接影响摆角控制的成功与否,因此需要进行精准测定。目前钢丝绳长度测定多采用主钩编码器测量进行替代,忽略了钢丝绳形变、天车卷筒、滑轮、钢丝绳穿套等因素的影响,无法准确反映出钢丝绳实际长度,从而影响摆角开环控制功能的实现。因此亟需一种方法能够简便地测定无人天车钢丝绳长度,同时保证测量数据真实可靠。
技术实现要素:
3.本发明目的是提供一种无人天车钢丝绳长度精准测定的方法,通过利用无人天车工作时,主钩摆角小于10
°
这一特性,将主钩摆动等效分解成大车方向和小车方向两个单摆运动;通过现场计时,代入单摆周期公式,计算出天车主钩在不同高度时的实测摆长;将几组实测摆长与主钩编码器数值相加,从而求得大车方向主钩顶点距离地面的高度和小车方向主钩顶点距离地面的高度;由此建立主钩编码器实测值与主钩实测摆长的数学关系,实现无人天车钢丝绳长度的实时准确测定;为无人天车摆角开环控制提供实时、准确的关键参数,有效地解决了背景技术中存在的上述问题。
4.本发明的技术方案是:一种无人天车钢丝绳长度精准测定的方法,包含以下步骤:(1)根据无人天车主钩摆角小于10
°
这一特性,将天车主钩摆动等效分解成大车方向和小车方向上的两个单摆运动,用计时的方式获取单摆运动周期,并利用已知的单摆周期公式和主钩编码器实测数据,进行计算,构建主钩编码器数值v、大车方向单摆周期t
大
、小车方向单摆周期t
小
、大车方向钢丝绳实测长度l
大
、小车方向钢丝绳实测长度l
小
、大车方向主钩顶点距离地面的高度h
大
和小车方向主钩顶点距离地面的高度h
小
的数学关系;将主钩提升,沿大车方向推动夹钳,使大车方向的主钩角度大于5
°
,小于10
°
,松手使主钩沿大车方向做单摆运动并开始计时,当摆动多个整数周期后,停止计时并计算大车等效单摆周期的时间;将此代入单摆周期公式,求得此时大车钢丝绳实测长度,并计算主钩顶点距离地面的高度;将主钩提升至不同高度,多次重复此过程求取大车钢丝绳实测长度,并计算主钩顶点距离地面的高度;最后求取大车钢丝绳实测长度平均值,并计算主钩顶点距离地面的高度平均值作为最终结果;(2)当需要进行摆角开环控制时,将h
大
和h
小
作为已知量引入,与编码器实测数据v进行减法计算,从而得出大车方向钢丝绳实测长度l
大
和小车方向钢丝绳实测长度l
小
。
5.只有当主钩摆角小于10
°
时,才能将其等效为单摆。
6.本发明的有益效果是:通过利用无人天车工作时,主钩摆角小于10
°
这一特性,将主钩摆动等效分解成大车方向和小车方向两个单摆运动;通过现场计时,代入单摆周期公式,计算出天车主钩在不同高度时的实测摆长;将几组实测摆长与主钩编码器数值相加,从而求得大车方向主钩顶点距离地面的高度和小车方向主钩顶点距离地面的高度;由此建立主钩编码器实测值与主钩实测摆长的数学关系,实现无人天车钢丝绳长度的实时准确测定;为无人天车摆角开环控制提供实时、准确的关键参数。
附图说明
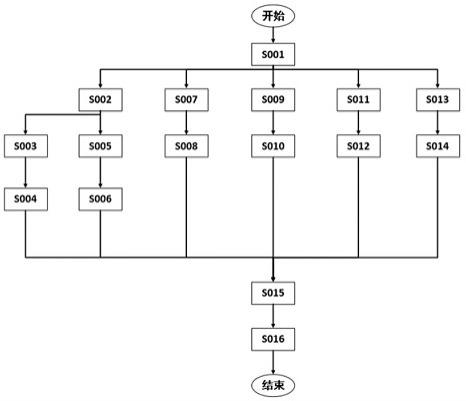
7.图1是本发明的工作流程图;图2是本发明的大车方向现场示意图;图3是本发明的小车方向现场示意图;图中:天车大车1、钢丝绳2、主钩3、地面4、天车小车5。
具体实施方式
8.为了使发明实施案例的目的、技术方案和优点更加清楚,下面将结合实施案例中的附图,对本发明实施案例中的技术方案进行清晰的、完整的描述,显然,所表述的实施案例是本发明一小部分实施案例,而不是全部的实施案例,基于本发明中的实施案例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施案例,都属于本发明保护范围。
9.一种无人天车钢丝绳长度精准测定的方法,包含以下步骤:(1)根据无人天车主钩摆角小于10
°
这一特性,将天车主钩摆动等效分解成大车方向和小车方向上的两个单摆运动,用计时的方式获取单摆运动周期,并利用已知的单摆周期公式和主钩编码器实测数据,进行计算,构建主钩编码器数值v、大车方向单摆周期t
大
、小车方向单摆周期t
小
、大车方向钢丝绳实测长度l
大
、小车方向钢丝绳实测长度l
小
、大车方向主钩顶点距离地面的高度h
大
和小车方向主钩顶点距离地面的高度h
小
的数学关系;将主钩提升至一定高度,沿大车方向推动夹钳,使大车方向的主钩角度大于5
°
,小于10
°
,松手使主钩沿大车方向做单摆运动并开始计时,当摆动多个整数周期后,停止计时并计算大车等效单摆周期的时间;将此代入单摆周期公式,求得此时大车钢丝绳实测长度,并计算主钩顶点距离地面的高度;将主钩提升至其它高度,多次重复此过程求取大车钢丝绳实测长度,并计算主钩顶点距离地面的高度;最后求取大车钢丝绳实测长度平均值,并计算主钩顶点距离地面的高度平均值作为最终结果;(2)当需要进行摆角开环控制时,将h
大
和h
小
作为已知量引入,与编码器实测数据v进行减法计算,从而得出大车方向钢丝绳实测长度l
大
和小车方向钢丝绳实测长度l
小
。
10.只有当主钩摆角小于10
°
时,才能将其等效为单摆。
11.在实际应用中,具体步骤如下:s001:将主钩下降至地面,标定为主钩编码器0米;s002:将主钩提升至1m高度;s003:只有当主钩摆角小于10
°
时,才能将其等效为单摆,因此,沿大车方向推动夹
钳,使大车方向的主钩角度大于5
°
,小于10
°
;s004:松手使主钩沿大车方向做单摆运动并开始计时,当摆动5个周期后,停止计时并计算一个周期的时间t
大1
;将t
大1
代入单摆周期公式,求得此时大车钢丝绳实测长度l
大1
;计算主钩顶点距离地面的高度h
大1
= l
大1 + 1m;s005:沿小车方向推动夹钳,使小车方向的主钩角度大于5
°
,小于10
°
;s006:松手使主钩沿小车方向做单摆运动并开始计时,当摆动5个周期后,停止计时并计算一个周期的时间t
小1
;将t
小1
代入单摆周期公式,求得此时小车钢丝绳实测长度l
小1
;计算主钩顶点距离地面的高度h
小1
= l
小1 + 1m;s007:将主钩提升至2m高度;s008:重复步骤s003至步骤s006,获得大车摆动周期t
大2
,大车钢丝绳实测长度 l
大2
,小车摆动周期t
小2
,小车钢丝绳实测长度l
小2
;主钩顶点距离地面的高度h
大2
= l
大2 + 2m;主钩顶点距离地面的高度h
小2
= l
小2 + 2m;s009:将主钩提升至3m高度;s010:重复步骤s003至步骤s006,获得大车摆动周期t
大3
,大车钢丝绳实测长度 l
大3 ,小车摆动周期t
小3
,小车钢丝绳实测长度l
小3
;主钩顶点距离地面的高度h
大3
= l
大3 + 3m;主钩顶点距离地面的高度h
小3
= l
小3 + 3m;s011:将主钩提升至4m高度;s012:重复步骤s003至步骤s006,获得大车摆动周期t
大4
,大车钢丝绳实测长度 l
大4
,小车摆动周期t
小4
,小车钢丝绳实测长度l
小4
;主钩顶点距离地面的高度h
大4
= l
大4 + 4m;主钩顶点距离地面的高度h
小4
=l
小4 + 4m;s013:将主钩提升至5m高度;s014:重复步骤s003至步骤s006,获得大车摆动周期t
大5
,大车钢丝绳实测长度 l
大5
,小车摆动周期t
小5
,小车钢丝绳实测长度l
小5
;主钩顶点距离地面的高度h
大5
= l
大5 + 5m;主钩顶点距离地面的高度h
小5
= l
小5 + 5m;s015:计算大车方向主钩顶点距离地面的高度h
大
=(h
大1 + h
大2 + h
大3 + h
大4 + h
大5
)
÷
5 ;计算小车方向主钩顶点距离地面的高度h
小
=(h
小1 + h
小2 + h
小3 + h
小4 + h
小5 )
÷
5 ;s016:建立钢丝绳实测长度与编码器实测数据关系,大车钢丝绳实测长度l
大
=h
大
‑ꢀ
v,小车钢丝绳实测长度l
小
=h
小
‑ꢀ
v。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1