一种针对楼梯房的搬运机器人的制作方法
1.本发明涉及机器人技术领域,特别涉及一种针对楼梯房的搬运机器人。
背景技术:
2.机器人可以运行预先编排的程序,按照人类的指挥执行任务,随着科技的不断创新与进步,机器人系统在各个领域的应用越来越广泛。目前,工业机器人的应用领域主要有弧焊、点焊、装配、搬用、喷漆、检测、研磨抛光、激光加工等,其中搬运机器人在搬运工作上应用广泛。专利号:cn107322565b 搬运机器人,虽然能够搬运重物,但是只能在平坦的地面进行运动,不能进行楼梯的攀爬,且结构复杂,不易于维修,制造成本过高不适宜大规模推广。
技术实现要素:
3.针对上述技术问题,本发明提供一种针对楼梯房的搬运机器人,包括楼梯、外墙、安装轨、爬行齿条、搬运机器人。
4.搬运机器人包括:载重平台;载重平台包括:底板;楼梯固定安装于外墙一侧的表面,外墙的表面且靠近楼梯台阶的位置处固定安装有安装轨,外墙扶手的内侧且对应外墙表面安装轨的位置处也固定安装有安装轨,安装轨的顶部固定安装有爬行齿条,两安装轨的表面均与载重平台相滑动连接,并沿外墙上下方向自由移动。
5.进一步的,搬运机器人还包括:平稳滑动组件、顶起机构,载重平台的正面和背面且靠近左侧的位置处均固定安装有平稳滑动组件,同侧的安装轨和爬行齿条均穿过平稳滑动组件,靠近载重平台中央的位置处固定安装有顶起机构。
6.进一步的,载重平台包括:升降板、载重电机、称重臂、传动皮带、传动齿轮、从动齿轮、蜗轮、轴座、立板、蜗杆、侧锥齿轮、主锥齿轮、防退棘轮、防退棘爪、簧片、支撑座、滑槽、逆转伸缩杆、连接耳、平移杆,底板顶部的正面和背面且靠近右侧的位置处均固定安装有称重臂,称重臂顶部的外侧轴承连接有爬行齿轮,称重臂顶部的内侧轴承连接有传动齿轮,底板顶部右侧的中央位置处固定安装有立板,靠近立板左侧的位置处设置有蜗杆,升降板的两端均轴承连接有轴座,两轴座均与底板相固定安装,蜗杆的两端均固定安装有从动齿轮,同侧的从动齿轮和传动齿轮通过传动皮带相传动连接,蜗杆的顶部啮合有蜗轮,蜗轮轴承连接于立板左侧且靠近顶部的位置处,蜗轮的左侧固定安装有主锥齿轮,主锥齿轮左侧的背面啮合有侧锥齿轮,侧锥齿轮固定安装有载重电机的输出轴表面,载重电机与底板相固定安装,主锥齿轮是左侧固定安装有防退棘轮,底板的顶部且位于防退棘轮下方的位置处固定安装有支撑座,支撑座的中央位置处轴承连接有防退棘爪,防退棘爪与支撑座通过簧片相固定安装,防退棘爪与防退棘轮相卡接,支撑座的顶部滑动连接有滑槽.滑槽与底板相固定安装,逆转伸缩杆与滑槽相固定安装,逆转伸缩杆的底部与底板的顶部相固定安装,升降板的正面和背面且靠近左右两侧的位置处均轴承连接有平移杆,平移杆的另一端轴承俩解忧连接耳,四连接耳的底部均与底板的顶部相固定安装。
7.进一步的,平稳滑动组件包括:外壳、滑轮、横向平衡装置、纵向平衡装置,外壳内壁的正面和背面且靠近左右两侧的位置处均轴承连接有滑轮,滑轮的轮子紧贴安装轨顶部的表面,外壳内壁的正面和背面且靠近中央的位置处均固定安装有横向平衡装置,外壳内壁的顶部固定安装有两纵向平衡装置。
8.进一步的,横向平衡装置包括:缓冲滑杆、反力板、反力弹簧、反力滑槽、流利轮、挤压快,挤压快正面的左右两侧均转动连接有流利轮,挤压快滑动插接于两流利轮之间,流利轮的底部滑动连接有反力滑槽,反力滑槽的外侧均固定安装有反力板,反力板的中央位置处滑动连接有缓冲滑杆,缓冲滑杆的表面套设有反力弹簧,流利轮紧贴安装轨的侧表面。
9.进一步的,纵向平衡装置包括:受力块、受力弹簧、内环齿轮、受力座、挤压块、导向杆、环槽、导向轮、连接杆、传动齿条、传动滑道、缓冲齿轮、内螺纹通、卫星齿轮、丝杆、双排滚轮、从动滑道、从动齿条,内环齿轮的底部均匀固定安装于若干导向轮,若干导向轮滑动连接于环槽内部,环槽固定安装于外壳内壁的顶部,内环齿轮的四周表面均匀设置有若干受力块,受力块的两侧均固定安装有挤压块,外壳内壁的顶部且对应若干受力块的位置处固定安装有受力座,受力座的左右两侧均滑动连接有导向杆,导向杆的表面套设有受力弹簧,内环齿轮的内表面均与啮合有若干卫星齿轮,若干卫星齿轮的表面一侧啮合有从动齿条,从动齿条活动连接于从动滑道的内部,从动滑道与外壳相固定安装,从动齿条的一端固定安装有连接杆,连接杆的另一端固定安装有传动齿条,传动齿条滑动连接于传动滑道的内部,传动滑道与外壳相固定安装,若干传动齿条均与缓冲齿轮相啮合,缓冲齿轮的内部固定安装有内螺纹通,内螺纹通的内部螺纹连接有丝杆,丝杆的顶部轴承连接有双排滚轮。
10.进一步的,顶起机构包括:顶起伸缩杆、转耳、补位板、下倾斜导块、上倾斜导块、推拉架、摆动杆、支撑件、滑动块,支撑件的顶部固定安装于升降板底部的中央位置处,支撑件的正面和背面的中央位置处均转动连接有摆动杆,摆动杆与支撑件之间设置有推拉架,推拉架两端的外侧均固定安装有滑动块,摆动杆的表面开设有腰圆槽,滑动块滑动连接于摆动杆的腰圆槽内部,摆动杆内壁的正面和背面之间且靠近左侧的位置处固定安装有上倾斜导块,上倾斜导块的底面与下倾斜导块的顶面相滑动连接,下倾斜导块与外壳相固定安装,摆动杆的左端铰接有补位板,补位板的另一端与转耳相铰接,转耳的左侧与顶起伸缩杆的伸缩轴相固定安装,顶起伸缩杆与外壳相固定安装。
11.本发明与现有技术相比的有益效果是:本发明通过通过载重电机的驱动,传动皮带、传动齿轮、从动齿轮、蜗轮、蜗杆、侧锥齿轮和主锥齿轮连动,从而调动带动爬行齿轮转动并在爬行齿条上爬行,从而能够带着重物往返于楼上楼下,十分的方便、省力。本发明通过平稳滑动组件在安装轨上滑行,当安装轨侧壁碰撞到流利轮是,将压力传导至挤压快,从而使得缓冲滑杆、反力板和反力滑槽连动,从而将平稳滑动组件受到的横向晃动力被反力弹簧抵消,从而使平稳滑动组件平稳运行。本发明通过顶起伸缩杆的伸缩,使得补位板、下倾斜导块、上倾斜导块、推拉架、摆动杆、支撑件和滑动块连动,从而使得摆动杆转动协同支撑件一起升降升降板,使得人们在搬运货物时,不用过渡弯腰,货物悬停于合适的位置,使得工作效率大大提高。
附图说明
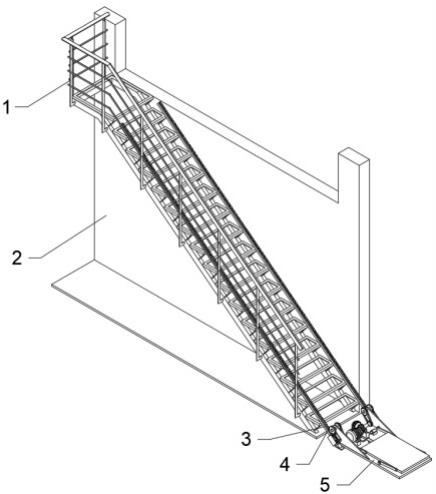
12.图1为本发明整体结构示意图。
13.图2为本发明搬运机器人结构示意图。
14.图3为本发明载重平台结构示意图。
15.图4为本发明平稳滑动组件结构示意图。
16.图5为本发明横向平衡装置结构示意图。
17.图6为本发明纵向平衡装置结构示意图。
18.图7为本发明顶起机构结构示意图。
19.附图标号:1-楼梯;2-外墙;3-安装轨;4-爬行齿条;5-搬运机器人;51-载重平台;511-升降板;512-载重电机;513-爬行齿轮;514-称重臂;515-传动皮带;516-传动齿轮;517-从动齿轮;518-蜗轮;519-轴座;5110-立板;5111-蜗杆;5112-侧锥齿轮;5113-主锥齿轮;5114-防退棘轮;5115-防退棘爪;5116-簧片;5117-支撑座;5118-滑槽;5119-逆转伸缩杆;5120-底板;5121-连接耳;5122-平移杆;52-平稳滑动组件;521-外壳;522-滑轮;523-横向平衡装置;5231-缓冲滑杆;5232-反力板;5233-反力弹簧;5234-反力滑槽;5235-流利轮;5236-挤压快;5237-退让块;524-纵向平衡装置;5241-受力块;5242-受力弹簧;5243-内环齿轮;5244-受力座;5245-挤压块;5246-导向杆;5247-环槽;5248-导向轮;5249-连接杆;52410-传动齿条;52411-传动滑道;52412-缓冲齿轮;52413-内螺纹通;52414-卫星齿轮;52415-丝杆;52416-双排滚轮;52417-从动滑道;52418-从动齿条;53-顶起机构;531-顶起伸缩杆;532-转耳;533-补位板;534-下倾斜导块;535-上倾斜导块;536-推拉架;537-摆动杆;538-支撑件;539-滑动块。
具体实施方式
20.下面结合具体实施例对本发明作进一步描述,在此发明的示意性实施例以及说明用来解释本发明,但并不作为对本发明的限定。
21.实施例:如图1、图2、图3、图4、图5、图6、图7所示的一种针对楼梯房的搬运机器人,包括楼梯1、外墙2、安装轨3、爬行齿条4、搬运机器人5。
22.搬运机器人5包括:载重平台51;载重平台51包括:底板5120;楼梯1固定安装于外墙2一侧的表面,外墙2的表面且靠近楼梯1台阶的位置处固定安装有安装轨3,外墙2扶手的内侧且对应外墙2表面安装轨3的位置处也固定安装有安装轨3,安装轨3的顶部固定安装有爬行齿条4,两安装轨3的表面均与载重平台51相滑动连接,并沿外墙2上下方向自由移动。
23.具体如图2所示为搬运机器人5的具体结构,其中载重平台51的正面和背面且靠近左侧的位置处均固定安装有平稳滑动组件52,同侧的安装轨3和爬行齿条4均穿过平稳滑动组件52,靠近载重平台51中央的位置处固定安装有顶起机构53。
24.具体如图3所示为载重平台51的具体结构,其中底板5120顶部的正面和背面且靠近右侧的位置处均固定安装有称重臂514,称重臂514顶部的外侧轴承连接有爬行齿轮513,称重臂514顶部的内侧轴承连接有传动齿轮516,底板5120顶部右侧的中央位置处固定安装有立板5110,靠近立板5110左侧的位置处设置有蜗杆5111,升降板511的两端均轴承连接有轴座519,两轴座519均与底板5120相固定安装,蜗杆5111的两端均固定安装有从动齿轮517,同侧的从动齿轮517和传动齿轮516通过传动皮带515相传动连接,蜗杆5111的顶部啮合有蜗轮518,蜗轮518轴承连接于立板5110左侧且靠近顶部的位置处,蜗轮518的左侧固定安装有主锥齿轮5113,主锥齿轮5113左侧的背面啮合有侧锥齿轮5112,侧锥齿轮5112固定
安装有载重电机512的输出轴表面,载重电机512与底板5120相固定安装,主锥齿轮5113是左侧固定安装有防退棘轮5114,底板5120的顶部且位于防退棘轮5114下方的位置处固定安装有支撑座5117,支撑座5117的中央位置处轴承连接有防退棘爪5115,防退棘爪5115与支撑座5117通过簧片5116相固定安装,防退棘爪5115与防退棘轮5114相卡接,支撑座5117的顶部滑动连接有滑槽5118.滑槽5118与底板5120相固定安装,逆转伸缩杆5119与滑槽5118相固定安装,逆转伸缩杆5119的底部与底板5120的顶部相固定安装,升降板511的正面和背面且靠近左右两侧的位置处均轴承连接有平移杆5122,平移杆5122的另一端轴承俩解忧连接耳5121,四连接耳5121的底部均与底板5120的顶部相固定安装,通过载重电机512的驱动,传动皮带515、传动齿轮516、从动齿轮517、蜗轮518、蜗杆5111、侧锥齿轮5112和主锥齿轮5113连动,从而调动带动爬行齿轮513转动并在爬行齿条4上爬行,从而能够带着重物往返于楼上楼下,十分的方便、省力。
25.具体如图4所示为平稳滑动组件52的具体结构,其中外壳521内壁的正面和背面且靠近左右两侧的位置处均轴承连接有滑轮522,滑轮522的轮子紧贴安装轨3顶部的表面,外壳521内壁的正面和背面且靠近中央的位置处均固定安装有横向平衡装置523,外壳521内壁的顶部固定安装有两纵向平衡装置524。
26.具体如图5所示为横向平衡装置523的具体结构,其中挤压快5236正面的左右两侧均转动连接有流利轮5235,挤压快5236滑动插接于两流利轮5235之间,流利轮5235的底部滑动连接有反力滑槽5234,反力滑槽5234的外侧均固定安装有反力板5232,反力板5232的中央位置处滑动连接有缓冲滑杆5231,缓冲滑杆5231的表面套设有反力弹簧5233,流利轮5235紧贴安装轨3的侧表面,通过平稳滑动组件52在安装轨3上滑行,当安装轨3侧壁碰撞到流利轮5235是,将压力传导至挤压快5236,从而使得缓冲滑杆5231、反力板5232和反力滑槽5234连动,从而将平稳滑动组件受到的横向晃动力被反力弹簧5233抵消,从而使平稳滑动组件52平稳运行。
27.具体如图6所示为纵向平衡装置524的具体结构,其中内环齿轮5243的底部均匀固定安装于若干导向轮5248,若干导向轮5248滑动连接于环槽5247内部,环槽5247固定安装于外壳521内壁的顶部,内环齿轮5243的四周表面均匀设置有若干受力块5241,受力块5241的两侧均固定安装有挤压块5245,外壳521内壁的顶部且对应若干受力块5241的位置处固定安装有受力座5244,受力座5244的左右两侧均滑动连接有导向杆5246,导向杆5246的表面套设有受力弹簧5242,内环齿轮5243的内表面均与啮合有若干卫星齿轮52414,若干卫星齿轮52414的表面一侧啮合有从动齿条52418,从动齿条52418活动连接于从动滑道52417的内部,从动滑道52417与外壳521相固定安装,从动齿条52418的一端固定安装有连接杆5249,连接杆5249的另一端固定安装有传动齿条52410,传动齿条52410滑动连接于传动滑道52411的内部,传动滑道52411与外壳521相固定安装,若干传动齿条52410均与缓冲齿轮52412相啮合,缓冲齿轮52412的内部固定安装有内螺纹通52413,内螺纹通52413的内部螺纹连接有丝杆52415,丝杆52415的顶部轴承连接有双排滚轮52416。
28.具体如图7所示为顶起机构53的具体结构,其中支撑件538的顶部固定安装于升降板511底部的中央位置处,支撑件538的正面和背面的中央位置处均转动连接有摆动杆537,摆动杆537与支撑件538之间设置有推拉架536,推拉架536两端的外侧均固定安装有滑动块539,摆动杆537的表面开设有腰圆槽,滑动块539滑动连接于摆动杆537的腰圆槽内部,摆动
杆537内壁的正面和背面之间且靠近左侧的位置处固定安装有上倾斜导块535,上倾斜导块535的底面与下倾斜导块534的顶面相滑动连接,下倾斜导块534与外壳521相固定安装,摆动杆537的左端铰接有补位板533,补位板533的另一端与转耳532相铰接,转耳532的左侧与顶起伸缩杆531的伸缩轴相固定安装,顶起伸缩杆531与外壳521相固定安装,通过顶起伸缩杆531的伸缩,使得补位板533、下倾斜导块534、上倾斜导块535、推拉架536、摆动杆537、支撑件538和滑动块539连动,从而使得摆动杆537转动协同支撑件538一起升降升降板511,使得人们在搬运货物时,不用过渡弯腰,货物悬停于合适的位置,使得工作效率大大提高。
29.在使用该针对楼梯房的搬运机器人时,通过载重电机512的驱动,传动皮带515、传动齿轮516、从动齿轮517、蜗轮518、蜗杆5111、侧锥齿轮5112和主锥齿轮5113连动,从而调动带动爬行齿轮513转动并在爬行齿条4上爬行,从而能够带着重物往返于楼上楼下,十分的方便、省力,并通过平稳滑动组件52在安装轨3上滑行,当安装轨3侧壁碰撞到流利轮5235是,将压力传导至挤压快5236,从而使得缓冲滑杆5231、反力板5232和反力滑槽5234连动,从而将平稳滑动组件受到的横向晃动力被反力弹簧5233抵消,从而使平稳滑动组件52平稳运行,而且通过顶起伸缩杆531的伸缩,使得补位板533、下倾斜导块534、上倾斜导块535、推拉架536、摆动杆537、支撑件538和滑动块539连动,从而使得摆动杆537转动协同支撑件538一起升降升降板511,使得人们在搬运货物时,不用过渡弯腰,货物悬停于合适的位置,使得工作效率大大提高。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1