一种剪叉式高空作业平台及其控制系统及方法与流程
1.本发明涉及工程机械技术领域,更具体地说,涉及一种剪叉式高空作业平台及其控制系统及方法。
背景技术:
2.剪叉式高空作业平台是用途广泛的高空作业专用设备。其分为电驱式、液驱式和越野式三类,工作高度可达18m,平台承载能力680kg,爬坡能力最高可达40%,移动灵活,升降平稳,操作简单,广泛应用于厂房建设,设备维修,建筑保养等施工领域。适用于长时间的高空作业,是园林修剪,装修施工,规模化工程建设的必备设备。
3.现有的剪叉式高空作业平台的操控方式分为上台操作与下台操作,下台操作无法进行前进后退的行走控制,这导致在上台无人操控时会导致车辆无法进行行走操作的问题。为了在下台进行操控,操作工人往往会取下上平台的操作手柄在地面进行行走操作。在地面操作期间,由于不能对车辆周边情况进行观察,就必须在一边进行控制一边观察周围的情况,这样难免会导致意外的发生。
4.而且现有剪叉车在高空行走时,不能注意到地面情况,需要有人对剪叉车的周边情况进行观察,造成不必要的人力资源的浪费,极大的降低了工程施工的效率。
5.综上所述,如何有效地解决剪叉式高空作业平台施工效率低等问题,是目前本领域技术人员需要解决的问题。
技术实现要素:
6.有鉴于此,本发明的第一个目的在于提供一种剪叉式高空作业平台及其控制系统,该控制系统的结构设计可以有效地解决剪叉式高空作业平台施工效率低的问题,本发明的第二个目的是提供一种剪叉式高空作业平台的控制方法。
7.为了达到上述第一个目的,本发明提供如下技术方案:
8.一种剪叉式高空作业平台的控制系统,包括:
9.深度相机处理系统,用于采集剪叉式高空作业平台附近预设范围的图像信息以获取用户的动作特征信息并将所述动作特征信息转换为车辆运动信息;
10.运动控制系统,用于驱动所述剪叉式高空作业平台执行相应动作;
11.主控系统,分别与所述运动控制系统和所述深度相机处理系统通信连接,用于接收所述车辆运动信息并处理后发送至所述运动控制系统。
12.优选的,上述控制系统中,还包括与所述主控系统通信连接的防护系统,所述防护系统包括设置于所述剪叉式高空作业平台四周以检测是否存在障碍物的测距装置,所述主控系统用于在所述测距装置检测到所述剪叉式高空作业平台的运动对应方向无障碍物时将接收的所述车辆运动信息处理后发送至所述运动控制系统。
13.优选的,上述控制系统中,所述测距装置包括超声波雷达。
14.优选的,上述控制系统中,还包括与所述主控系统通信连接的提醒装置,用于接收
所述主控系统发送的车辆运动信息并输出提醒。
15.优选的,上述控制系统中,所述提醒装置为语音播报系统,用于接收所述主控系统发送的车辆运动信息并将对应的运动状态进行语音播报。
16.优选的,上述控制系统中,所述主控系统具有用于接收用户输入的模式选择指令的用户交互装置,所述主控系统用于根据所述模式选择指令将所述剪叉式高空作业平台切换至对应的控制模式。
17.本发明提供的剪叉式高空作业平台的控制系统包括深度相机处理系统、运动控制系统和主控系统。其中,深度相机处理系统,用于采集剪叉式高空作业平台附近预设范围的图像信息以获取用户的动作特征信息并将动作特征信息转换为车辆运动信息;运动控制系统,用于驱动剪叉式高空作业平台执行相应动作;主控系统,分别与运动控制系统和深度相机处理系统通信连接,用于接收车辆运动信息并处理后发送至运动控制系统。
18.应用本发明提供的剪叉式高空作业平台的控制系统,深度相机处理系统采集剪叉式高空作业平台附近预设范围的图像信息以获取用户的动作特征信息并将动作特征信息转换为车辆运动信息后发送至主控系统。主控系统接收车辆运动信息并处理后发送至运动控制系统,运动控制系统则根据主控系统发送的控制信息驱动剪叉式高空作业平台执行相应动作。综上,该剪叉式高空作业平台,能够通过用户的动作特征即姿态实现对剪叉式高空作业平台的驱动控制,因此能够在地面观察剪叉式高空作业平台周围情况的同时,实现驱动控制,提高了工程施工的效率。
19.本发明还提供了一种剪叉式高空作业平台,该剪叉式高空作业平台包括上述任一种控制系统。由于上述的控制系统具有上述技术效果,具有该控制系统的剪叉式高空作业平台也应具有相应的技术效果。
20.为了达到上述第二个目的,本发明提供如下技术方案:
21.一种剪叉式高空作业平台的控制方法,包括:
22.接收由用户的动作特征信息转换而成的车辆运动信息,所述动作特征信息获取自剪叉式高空作业平台附近预设范围的图像信息;
23.根据所述车辆运动信息,控制所述剪叉式高空作业平台执行相应动作。
24.优选的,上述控制方法中,所述接收由用户的动作特征信息转换而成的车辆运动信息之后,还包括:
25.检测所述剪叉式高空作业平台的运动对应方向是否存在障碍物;
26.若否则根据所述车辆运动信息,控制所述剪叉式高空作业平台执行相应动作。
27.优选的,上述控制方法中,所述接收由用户的动作特征信息转换而成的车辆运动信息之后,还包括:
28.根据所述车辆运动系统,控制提醒系统输出与运动状态相应的提醒。
29.优选的,上述控制方法中,所述接收由用户的动作特征信息转换而成的车辆运动信息之前,包括:
30.接收用户输入的模式选择指令并将所述剪叉式高空作业平台切换至对应的控制模式;
31.若控制模式为手柄控制,则控制手柄控制系统接收运动指令;
32.若控制模式为人体姿态控制,则控制深度相机处理系统采集剪叉式高空作业平台
附近预设范围的图像信息。
33.应用本发明提供的剪叉式高空作业平台的控制方法,能够通过用户的动作特征即姿态实现对剪叉式高空作业平台的驱动控制,因此能够在地面观察剪叉式高空作业平台周围情况的同时,实现驱动控制,提高了工程施工的效率。
附图说明
34.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
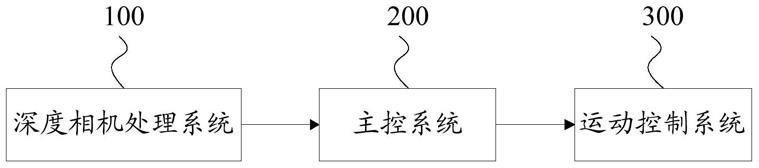
35.图1为本发明一个具体实施例的剪叉式高空作业平台的控制系统的结构示意图;
36.图2控制系统各部件的布置位置示意图;
37.图3为本发明一个具体实施例的剪叉式高空作业平台的控制方法的流程示意图;
38.图4为人体站立位置示意图;
39.图5.1为启动姿态示意图;
40.图5.2为车体右转姿态示意图;
41.图5.3为车体左转姿态示意图;
42.图5.4为车体停止姿态示意图;
43.图5.5为平台升降控制模式姿态示意图;
44.图5.6为平台举升姿态示意图;
45.图5.7为平台下降姿态示意图;
46.图5.8为平台暂停姿态示意图;
47.图5.9为结束控制姿态示意图。
48.附图中标记如下:
49.深度相机处理系统100,主控系统200,运动控制系统300,摄像头1,超声波雷达2,工业控制计算机3。
具体实施方式
50.本发明实施例公开了一种剪叉式高空作业平台及其控制系统及控制方法,以提高工程施工效率。
51.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
52.请参阅图1
‑
图2,图1为本发明一个具体实施例的剪叉式高空作业平台的控制系统的结构示意图;图2控制系统各部件的布置位置示意图。
53.在一个具体实施例中,本发明提供的剪叉式高空作业平台的控制系统包括深度相机处理系统100、运动控制系统300和主控系统200。
54.其中,深度相机处理系统100,用于采集剪叉式高空作业平台附近预设范围的图像
信息以获取用户的动作特征信息并将动作特征信息转换为车辆运动信息。深度相机处理系统100包括摄像头1,具体为双目摄像头1。将摄像头1安装于剪叉式高空作业平台车体的前侧。深度相机处理系统100在接收到主控系统200的图像开始检测信号后,其深度相机进行接收图像信号,将图像信号通过图像处理库openni进行处理,生成人体骨骼图像。对人体骨骼图像信息进行动作特征提取得到人体运动的动作特征信息。将动作特征信息转换为车辆运动信息,再经过轨迹追踪算法与滤波算法的纠正,最终得到车辆实际的运动信息,再将运动信息传输到主控系统200中通过主控系统200进行处理,具体可通过can总线实现运动信息的传输。
55.具体的,深度相机处理系统100的工作流程如下:
56.接收图像检测开始信号;
57.采集剪叉式高空作业平台附近预设范围的图像信息;
58.图像处理生成人体骨骼图像;
59.由人体骨骼图像提取动作特征信息;
60.将动作特征信息转换为车辆运动信息;
61.轨迹追踪算法处理;
62.滤波算法处理;
63.纠正后的车辆运动信息传送至主控系统200。
64.需要说明的是,剪叉式高空作业平台附近预设范围可根据具体需要设置,如由摄像头1的参数确定,或者设置为采集距离剪叉式高空作业平台的车体1m之外,且位于双目检测范围如20m之内的范围。
65.运动控制系统300,用于驱动剪叉式高空作业平台执行相应动作。如驱动剪叉式高空作业平台的车体左转、右转、停止转动、平台举升、平台下降、平台暂停运动等。具体运动控制系统300的结构可参考剪叉式高空作业平台中常规运动控制系统300的结构设置,此处不再赘述。
66.主控系统200,分别与运动控制系统300和深度相机处理系统100通信连接,用于接收车辆运动信息并处理后发送至运动控制系统300。深度相机处理系统100得到的车辆运动信息传输至主控系统200中,主控系统200再根据相应的协议控制运动控制系统300进行相应运动的驱动。具体控制原理等可参考常规手柄操控的相应运动控制原理,此处不再赘述。主控系统200具体可以为工业控制计算机3,其可以安装在剪叉式高空作业平台的车体的底盘上。
67.应用本发明提供的剪叉式高空作业平台的控制系统,深度相机处理系统100采集剪叉式高空作业平台附近预设范围的图像信息以获取用户的动作特征信息并将动作特征信息转换为车辆运动信息后发送至主控系统200。主控系统200接收车辆运动信息并处理后发送至运动控制系统300,运动控制系统300则根据主控系统200发送的控制信息驱动剪叉式高空作业平台执行相应动作。综上,该剪叉式高空作业平台,能够通过用户的动作特征即姿态实现对剪叉式高空作业平台的驱动控制,因此能够在地面观察剪叉式高空作业平台周围情况的同时,实现驱动控制,提高了工程施工的效率。
68.进一步地,还包括与主控系统200通信连接的防护系统,防护系统包括设置于剪叉式高空作业平台四周以检测是否存在障碍物的测距装置,主控系统200用于在测距装置检
测到剪叉式高空作业平台的运动对应方向无障碍物时将接收的车辆运动信息处理后发送至运动控制系统300。防护系统具体在主控系统200初始化之后即启动,通过测距装置检测剪叉式高空作业平台四周是否存在障碍物。主控系统200在接收车辆运动信息后,根据防护系统反馈的信息,若车辆运动对应的方向无障碍物则控制运动控制系统300驱动剪叉式高空作业平台执行相应动作,否则可以进行报警提示。通过防护系统的设置,对剪叉式高空作业平台周围环境的检查不单纯依赖于操作人员的观察,有效提升了对剪叉式高空作业平台运动安全性。
69.具体的,测距装置包括超声波雷达2。超声波雷达2的数量可根据需要设置,如在剪叉式高空作业平台的车体四周设置八个超声波雷达2,以组成超声波预警系统。超声波雷达2的工作流程大致如下:信号触发;触发超声波距离信号;进行超声波信号滤波;将对应的距离信息传送至主控系统200。具体的,超声波雷达2在接收到主控系统200发送的超声波测距的信号后,超声波雷达2的超声波发射装置将超声波发射出去,在等待超声波余震散去后,超声波雷达2的超声波接收装置进行从物体反射回来的波进行收集,在检测到微弱的电信号后,通过放大电路对电信号进行放大,通过卡尔曼滤波算法对距离数据处理,最终得到是否有障碍物的结果。超声波雷达2测距结构简单,测距结构精准。根据需要,测距装置也可以采用其他常规的测距传感器等。
70.为了更方便的提示剪叉式高空作业平台的运动状态,在一个实施例中,还包括与主控系统200通信连接的提醒装置,用于接收主控系统200发送的车辆运动信息并输出提醒。即在剪叉式高空作业平台的车体运动状态下,主控系统200将车辆运动信息发送至提醒装置,提醒装置将车辆运动信息对应的运动状态进行输出,从而提醒相关人员注意,进一步提升剪叉式高空作业平台的施工安全性。进一步地,提醒装置在输出完毕后将输出完毕信号反馈至主控系统200。
71.具体的,提醒装置为语音播报系统,用于接收主控系统200发送的车辆运动信息并将对应的运动状态进行语音播报。具体可以将语音播报系统安装于剪叉式高空作业平台的车体底架上,语音播报系统具体包括喇叭与音频控制模块,车辆运动状态下,控制通过can总线将车辆运动信息发送至语音播报系统,语音播报系统将对应的运动状态进行播放。在播放完毕后反馈至主控系统200播报完毕信息。
72.在上述各实施例的基础上,主控系统200具有用于接收用户输入的模式选择指令的用户交互装置,主控系统200用于根据模式选择指令将剪叉式高空作业平台切换至对应的控制模式。剪叉式高空作业平台一般具有手柄控制系统,用户通过操作手柄进行剪叉式高空作业平台动作的控制。本技术中通过增加深度相机处理系统100,用户通过姿态进行剪叉式高空作业平台动作的控制。因而,剪叉式高空作业平台具有手柄操控及人体姿态操控的不同控制模式。用户交互装置用于接收用户输入的模式选择指令,如选为手柄操控或选择人体姿态操控,而后主控系统200则根据模式选择指令相应的将剪叉式高空作业平台切换至对应的控制模式,如手柄操控模式,即通过手柄控制系统进行动作控制,或者人体姿态操控模式,即通过人体姿态进行动作控制。主控系统200根据不同控制模式下获得的车辆运动信息,如手动控制系统发送的车辆运动信息或深度相机处理系统100发送的车辆运动信息,控制运动控制系统300执行相应的动作。
73.具体的,用户交互装置包括对应不同控制模式的按键或旋钮,如旋钮对应四个档
位,分别对应剪叉式高空作业平台的主控系统200控制模式、手柄控制模式、姿态控制模式即系统关闭模式。在默认状态下,系统处于关闭状态。通过转动旋钮将控制模式改为手柄控制、姿态控制或者主控系统200本身进行控制。进一步地,用户交互装置还包括显示模块,用于显示当前控制模式。
74.基于上述实施例中提供的控制系统,本发明还提供了一种剪叉式高空作业平台,该剪叉式高空作业平台包括上述实施例中任意一种控制系统。由于该剪叉式高空作业平台采用了上述实施例中的控制系统,所以该剪叉式高空作业平台的有益效果请参考上述实施例。
75.本发明还提供了一种剪叉式高空作业平台的控制方法,请参阅图3,图3为本发明一个具体实施例的剪叉式高空作业平台的控制方法的流程示意图。
76.在一个具体实施例中,剪叉式高空作业平台的控制方法包括以下步骤:
77.s1:接收由用户的动作特征信息转换而成的车辆运动信息,动作特征信息获取自剪叉式高空作业平台附近预设范围的图像信息;
78.s2:根据车辆运动信息,控制剪叉式高空作业平台执行相应动作。
79.具体的,通过深度相机处理系统采集剪叉式高空作业平台附近预设范围的图像信息以获取用户的动作特征信息并将所述动作特征信息转换为车辆运动信息后发送至主控系统,主控系统则根据接收的车辆运动信息,处理后控制运动控制系统使剪叉式高空作业平台执行相应动作。具体深度相机处理系统及主控系统、运动控制系统的工作流程等均可参考上述剪叉式高空作业平台的控制系统的实施例,此处不再赘述。
80.应用本发明提供的剪叉式高空作业平台的控制方法,能够通过用户的动作特征即姿态实现对剪叉式高空作业平台的驱动控制,因此能够在地面观察剪叉式高空作业平台周围情况的同时,实现驱动控制,提高了工程施工的效率。
81.进一步地,步骤s1之后还包括:
82.检测剪叉式高空作业平台的运动对应方向是否存在障碍物;
83.若否则根据车辆运动信息,控制剪叉式高空作业平台执行相应动作。
84.具体可以通过防护系统检测剪叉式高空作业平台的运动对应方向是否存在障碍物,防护系统的具体工作流程可参考上述剪叉式高空作业平台的控制系统的实施例,此处不再赘述。
85.更进一步地,步骤s1之后还包括:
86.根据车辆运动系统,控制提醒系统输出与运动状态相应的提醒。
87.具体提醒系统的结构及工作流程可参考上述剪叉式高空作业平台的控制系统的实施例,此处不再赘述。
88.在上述各实施例的基础上,步骤s1之前,包括:
89.接收用户输入的模式选择指令并将剪叉式高空作业平台切换至对应的控制模式;
90.若控制模式为手柄控制,则控制手柄控制系统接收运动指令;
91.若控制模式为人体姿态控制,则控制深度相机处理系统采集剪叉式高空作业平台附近预设范围的图像信息。
92.具体可以通过用户交互系统接收用户输入的模式选择指令,其具体结构可参考上述剪叉式高空作业平台的控制系统的实施例,此处不再赘述。
93.在上述剪叉式高空作业平台的控制系统及控制方法中,将用户的动作特征信息并将转换为车辆运动信息,以下以一个具体实施方式为例说明。
94.在该实施例中,人体进入到车辆的规定位置之后,如人体距离车体的范围处于距离车体1m之外,并且不能远于双目检测的范围(20m),具体可参阅图4。使用特定姿态对车辆进行唤醒。深度相机处理系统辨识出第一个进入到合适位置,如高空作业平台附近预设范围内并展示出特定姿态的人员作为控制人员,并会对该人员进行锁定,进一步辨识其后续动作。具体启动控制的姿态动作如下:控制人员双手平举,如图5.1所示。此时会有语音系统提醒:姿态控制模式,请选择模式。
95.在进入到姿态控制控制模式后,需要进行模式选择,在左手向上举动,并且右手手肘的位置高于眼睛的位置,会触发选择底盘运动模式。此时语音会播报:底盘运动模式,并且人体的左手可以控制车辆的左转和右转。
96.具体的,在进入到姿态控制控制模式后,右手保持动作不变,左手手腕的位置高于跨部,并且低于眼睛的位置,此时,以左肩膀垂直向下为中心线,左手向右偏移车辆就会向右转动,具体参阅图5.2。同时语音提醒系统会播报:车辆右转。当左手向左偏移,车辆就会向左转动,具体参阅图5.3。此时车辆上的语音系统会播报:车辆左转。在右手位置不变,左手手肘与手腕处于中间位置的时候,车辆会自动停止转动,具体参阅图5.4。中间位置是指:左手手腕和自己的右肩部和左脚呈一条直线。在对车辆进行选择底盘运动模式后,默认进入跟随状态,在人体进行前后移动时候,车辆在与人体保持一定距离的情况下跟随人体进行前后移动。车辆向前运动时,会播报正在前进;车辆向后运动时,会播报正在后退。
97.在右手向下放置时,向下放置是指右手手肘低于跨部位置,会触发选择平台升降控制模式,具体参阅图5.5。此时语音会播报:升降控制模式。此时左手可以控制平台的升降。在左手手腕高于眼睛的位置时,平台上升,具体参阅图5.6。此时会有语音提醒:平台上升,剪叉式高空作业平台的平台就会进行升高操作。在左手手腕低于跨部的位置时,平台下降,具体参阅图5.7。此时会有语音提醒:平台下降,平台进行下降操作。在右手手腕平举时,平台就会在举升高度停止动作,具体参阅图5.8。
98.在左右手进行同时位于眼睛与髋部之间,并且在胸前左手与右手呈交叉形式:左手手腕位于右手手腕的右边,此时就认为人体手腕呈交叉形式,则结束相应控制,具体参阅图5.9。语音模块会播报:已退出。
99.以上举例说明了不同姿态对应的剪叉式高空作业平台的不同动作,根据需要,对应剪叉式高空作业平台的不同动作,也可以相应的设置不同的姿态,并将相应的对应关系预存于深度相机处理系统即可。
100.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
101.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1