一种智能化玻璃瓶封装设备的制作方法
1.本发明涉及一种智能工业设备领域,更具体的说是一种智能化玻璃瓶封装设备。
背景技术:
2.现代各种饮料均用玻璃瓶承装,生产过程中自动化程度不高,易发生碰撞破碎情况,本发明解决了上述问题。
技术实现要素:
3.本发明的目的是提供一种智能化玻璃瓶封装设备,可以自动化的完成玻璃瓶的封箱、封装工序。
4.本发明的目的通过以下技术方案来实现:
5.一种智能化玻璃瓶封装设备,包括运箱组合体、装箱组合体和封箱组合体,其特征在于:所述运箱组合体与装箱组合体相连接,封箱组合体固定在装箱组合体一侧。
6.作为本技术方案的进一步优化,本发明所述运箱组合体包括运输轴、运输侧壁、运输辊ⅰ、空箱运输带、夹紧支耳、夹板、夹紧弹簧、电机支架、电机、电机轴、电机轴支架、锥齿轮ⅰ、锥齿轮ⅱ、锥齿轮ⅱ轴、锥齿轮ⅱ轴支架、拨杆ⅰ、拨槽、推板、带轮ⅰ、皮带ⅰ、带轮ⅰ轴、带轮ⅰ轴支架、上板、拨杆ⅱ、长槽环、滑动支架、提环和感应板,运输轴与运输辊ⅰ相连接,两个运输辊ⅰ均与运输侧壁转动连接,两个运输辊ⅰ通过空箱运输带相连接,夹紧支耳与运输侧壁相连接,夹紧支耳与夹板相铰接,夹紧弹簧两端分别与运输侧壁、夹板相连接,电机支架与运输侧壁相连接,电机支架与电机相连接,电机与电机轴相连接,电机轴与电机轴支架转动连接,电机轴支架与运输侧壁相连接,电机轴与锥齿轮ⅰ相连接,锥齿轮ⅰ与锥齿轮ⅱ啮合连接,锥齿轮ⅱ与锥齿轮ⅱ轴相连接,锥齿轮ⅱ轴与锥齿轮ⅱ轴支架转动连接,锥齿轮ⅱ轴支架与运输侧壁相连接,锥齿轮ⅱ轴与拨杆ⅰ相连接,拨杆ⅰ与拨槽滑动连接,拨槽位于推板上,推板与运输侧壁滑动连接,带轮ⅰ与电机轴相连接,两个带轮ⅰ通过皮带ⅰ与带轮ⅰ轴相连接,带轮ⅰ轴与带轮ⅰ轴支架转动连接,带轮ⅰ轴支架与上板相连接,上板与运输侧壁相连接,带轮ⅰ轴与拨杆ⅱ拨杆ⅱ相连接,拨杆ⅱ与长槽环滑动连接,长槽环与滑动支架相连接,滑动支架与上板滑动连接,滑动支架与提环相连接,感应板与运输侧壁相连接,感应板上设有接触传感器,此接触传感器可控制电机启停,运输轴与动力相连接。
7.作为本技术方案的进一步优化,本发明所述装箱组合体包括带轮ⅱ、皮带ⅱ、玻璃瓶运输轴、运输辊ⅱ、玻璃瓶运输带、运输支架、分隔箱、分隔板、滑柱、底板、升降支架、液压缸、伸缩杆、齿条ⅰ、齿轮ⅰ、卷绳辊、卷绳、绳辊支架、滚轮、齿条ⅱ、齿条ⅱ滑轨、拉簧、拉簧支架、齿轮ⅱ、齿轮ⅱ轴和开合底门,运输轴与带轮ⅱ相连接,两个带轮ⅱ通过皮带ⅱ与玻璃瓶运输轴相连接,玻璃瓶运输轴与运输侧壁转动连接,玻璃瓶运输轴与运输辊ⅱ相连接,两个运输辊ⅱ均与运输支架转动连接,两个运输辊ⅱ通过玻璃瓶运输带相连接,分隔箱与运输支架相连接,分隔箱与分隔板相连接,滑柱与分隔箱相连接,滑柱与底板相连接,底板与运输支架相连接,升降支架与滑柱滑动连接,滑柱与伸缩杆相连接,伸缩杆与液压缸滑动连
接,液压缸与底板相连接,液压缸与液压系统相连接,升降支架与齿条ⅰ相连接,齿条ⅰ与齿轮ⅰ啮合连接,齿轮ⅰ与卷绳辊相连接,卷绳辊与绳辊支架转动连接,绳辊支架与分隔箱相连接,卷绳辊与卷绳相连接,卷绳与滚轮相接触,滚轮与绳辊支架转动连接,卷绳与齿条ⅱ相连接,齿条ⅱ与齿条ⅱ滑轨滑动连接,齿条ⅱ滑轨与分隔箱相连接,齿条ⅱ与拉簧相连接,拉簧与拉簧支架相连接,拉簧处于拉伸状态,拉簧支架与分隔箱相连接,齿条ⅱ与齿轮ⅱ啮合连接,齿轮ⅱ与齿轮ⅱ轴相连接,齿轮ⅱ轴与分隔箱转动连接,齿轮ⅱ轴与开合底门相连接,升降支架上设有质量传感器。
8.作为本技术方案的进一步优化,本发明所述封箱组合体包括封装运输辊、封装运输带、封装支架、带轮ⅲ、皮带ⅲ、扇叶轴、扇叶轴支架、扇叶、扇叶罩、吸气孔、排气孔、固定板和封箱室,两个封装运输辊均与封装支架转动连接,两个封装运输辊通过封装运输带相连接,封装运输辊与带轮ⅲ相连接,两个带轮ⅲ通过皮带ⅲ与扇叶轴相连接,扇叶轴与扇叶轴支架转动连接,扇叶轴支架与封装支架相连接,扇叶轴与扇叶相连接,扇叶罩与扇叶轴支架相连接,吸气孔、排气孔均位于扇叶罩上,扇叶轴与扇叶罩转动连接,扇叶位于扇叶罩内,固定板与封装支架相连接,固定板与封箱室相连接,运输辊与动力相连接。
9.本发明一种智能化玻璃瓶封装设备的有益效果为:将空箱置于运箱组合体上,运箱组合体将空箱的箱四个箱盖立起便于后续装瓶,立起后将纸壳箱逐一运至装箱组合体上,装箱组合体将玻璃瓶按顺序摆好并将空箱升起,玻璃瓶落入升起的空箱内,不会发生过高破碎的情况,装满后箱子落下,被推入封箱组合体内,封箱组合体的扇叶产生吸力,吸附相对的两个箱盖,其余箱盖落下,最后剩余两个箱盖在封箱室被扣合,完成封装。
附图说明
10.下面结合附图和具体实施方法对本发明做进一步详细的说明。
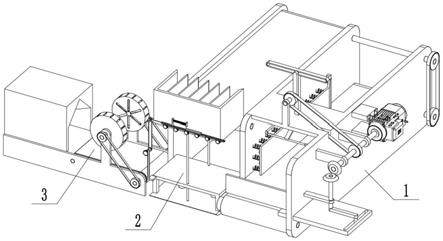
11.图1是本发明的整体结构示意图;
12.图2是本发明运箱组合体1的结构示意图一;
13.图3是本发明运箱组合体1的结构示意图二;
14.图4是本发明运箱组合体1的结构示意图三;
15.图5是本发明装箱组合体2的结构示意图一;
16.图6是本发明装箱组合体2的结构示意图二;
17.图7是本发明装箱组合体2的结构示意图三;
18.图8是本发明装箱组合体2的结构示意图四;
19.图9是本发明封箱组合体3的结构示意图一;
20.图10是本发明封箱组合体3的结构示意图二;
21.图11是本发明封箱组合体3的结构示意图三。
22.图中:运箱组合体1;运输轴1
‑
1;运输侧壁1
‑
2;运输辊ⅰ1
‑
3;空箱运输带1
‑
4;夹紧支耳1
‑
5;夹板1
‑
6;夹紧弹簧1
‑
7;电机支架1
‑
8;电机1
‑
9;电机轴1
‑
10;电机轴支架1
‑
11;锥齿轮ⅰ1
‑
12;锥齿轮ⅱ1
‑
13;锥齿轮ⅱ轴1
‑
14;锥齿轮ⅱ轴支架1
‑
15;拨杆ⅰ1
‑
16;拨槽1
‑
17;推板1
‑
18;带轮ⅰ1
‑
19;皮带ⅰ1
‑
20;带轮ⅰ轴1
‑
21;带轮ⅰ轴支架1
‑
22;上板1
‑
23;拨杆ⅱ1
‑
24;长槽环1
‑
25;滑动支架1
‑
26;提环1
‑
27;感应板1
‑
28;装箱组合体2;带轮ⅱ2
‑
1;皮带ⅱ2
‑
2;玻璃瓶运输轴2
‑
3;运输辊ⅱ2
‑
4;玻璃瓶运输带2
‑
5;运输支架2
‑
6;分隔箱2
‑
7;分隔板2
‑
8;
滑柱2
‑
9;底板2
‑
10;升降支架2
‑
11;液压缸2
‑
12;伸缩杆2
‑
13;齿条ⅰ2
‑
14;齿轮ⅰ2
‑
15;卷绳辊2
‑
16;卷绳2
‑
17;绳辊支架2
‑
18;滚轮2
‑
19;齿条ⅱ2
‑
20;齿条ⅱ滑轨2
‑
21;拉簧2
‑
22;拉簧支架2
‑
23;齿轮ⅱ2
‑
24;齿轮ⅱ轴2
‑
25;开合底门2
‑
26;封箱组合体3;封装运输辊3
‑
1;封装运输带3
‑
2;封装支架3
‑
3;带轮ⅲ3
‑
4;皮带ⅲ3
‑
5;扇叶轴3
‑
6;扇叶轴支架3
‑
7;扇叶3
‑
8;扇叶罩3
‑
9;吸气孔3
‑
10;排气孔3
‑
11;固定板3
‑
12;封箱室3
‑
13。
具体实施方式
23.下面结合附图对本发明作进一步详细说明。
24.本装置中所述的固定连接是指通过焊接、螺纹固定等方式进行固定,结合不同的使用环境,使用不同的固定方式;所述的转动连接是指通过将轴承烘装在轴上,轴或轴孔上设置有弹簧挡圈槽,通过将弹性挡圈卡在挡圈槽内实现轴承的轴向固定,实现转动;所述的滑动连接是指通过滑块在滑槽或导轨内的滑动进行连接,滑槽或导轨一般为阶梯状,防止滑块在滑槽或导轨内发生脱落;所述的铰接是指通过在铰链、销轴和短轴等连接零件上进行活动的连接方式;所需密封处均是通过密封圈或o形圈实现密封。
25.具体实施方式一:
26.下面结合图1
‑
11说明本实施方式,一种智能化玻璃瓶封装设备,包括运箱组合体1、装箱组合体2和封箱组合体3,将空箱置于运箱组合体1上,运箱组合体1将空箱的箱四个箱盖立起便于后续装瓶,立起后将纸壳箱逐一运至装箱组合体2上,装箱组合体2将玻璃瓶按顺序摆好并将空箱升起,玻璃瓶落入升起的空箱内,不会发生过高破碎的情况,装满后箱子落下,被推入封箱组合体3内,封箱组合体3的扇叶产生吸力,吸附相对的两个箱盖,其余箱盖落下,最后剩余两个箱盖在封箱室被扣合,完成封装。
27.具体实施方式二:
28.下面结合图1
‑
11说明本实施方式,本实施方式对实施方式一作进一步说明,将空箱置于空箱运输带1
‑
4上,开启运输轴1
‑
1动力,运输轴1
‑
1带动运输辊ⅰ1
‑
3转动,两个运输辊ⅰ1
‑
3带动空箱运输带1
‑
4向前运动,在夹板1
‑
6、夹紧弹簧1
‑
7的定心作用下,纸箱沿两个夹板1
‑
6向前运动,当空箱行至空箱运输带1
‑
4尽头被感应板1
‑
28阻拦停止,后续纸箱依次停止,感应板1
‑
28上设有接触传感器,此接触传感器可控制电机1
‑
9启停,感应板1
‑
28感应到纸箱与之接触,开启电机1
‑
9使电机1
‑
9转动一周后停止转动,电机1
‑
9带动电机轴1
‑
10转动,电机轴1
‑
10带动锥齿轮ⅰ1
‑
12转动,锥齿轮ⅰ1
‑
12带动锥齿轮ⅱ1
‑
13转动,锥齿轮ⅱ1
‑
13带动锥齿轮ⅱ轴1
‑
14转动,锥齿轮ⅱ轴1
‑
14带动拨杆ⅰ1
‑
16转动,拨杆ⅰ1
‑
16通过拨槽1
‑
17带动推板1
‑
18滑动将第一个纸箱推出,电机轴1
‑
10带动带轮ⅰ1
‑
19转动,两个带轮ⅰ1
‑
19通过皮带ⅰ1
‑
20带动带轮ⅰ轴1
‑
21转动,带轮ⅰ轴1
‑
21带动拨杆ⅱ1
‑
24转动,拨杆ⅱ1
‑
24通过长槽环1
‑
25带动滑动支架1
‑
26在上板1
‑
23上往复运动,滑动支架1
‑
26带动提环1
‑
27向下运动插入第二个纸箱内,提环1
‑
27向上运动将四个箱盖提起,四个箱盖彼此支撑不会倒塌,从第二个纸箱开始每个纸箱的四个箱盖均会被提起,当推板1
‑
18收回后,电机1
‑
9停止转动,等待下个纸箱与感应板1
‑
28相接触。
29.具体实施方式三:
30.下面结合图1
‑
11说明本实施方式,本实施方式对实施方式一作进一步说明,运输轴1
‑
1带动带轮ⅱ2
‑
1转动,两个带轮ⅱ2
‑
1通过皮带ⅱ2
‑
2带动玻璃瓶运输轴2
‑
3转动,玻璃
瓶运输轴2
‑
3带动运输辊ⅱ2
‑
4转动,两个运输辊ⅱ2
‑
4带动玻璃瓶运输带2
‑
5转动,玻璃瓶运输带2
‑
5带动置于其上的玻璃瓶运动,当玻璃瓶运动至玻璃瓶运输带2
‑
5尽头,滑入分隔箱2
‑
7内,并且在后续玻璃瓶的推动作用下,分别进入分隔板2
‑
8之间开合底门2
‑
26之上,提起箱盖的纸箱被推板1
‑
18推入升降支架2
‑
11上,升降支架2
‑
11上设有质量传感器,当传感器感应到的质量为空箱质量,传感器控制液压系统向液压缸2
‑
12内注油,伸缩杆2
‑
13升起,伸缩杆2
‑
13带动升降支架2
‑
11沿滑柱2
‑
9向上滑动,升降支架2
‑
11带动齿条ⅰ2
‑
14运动,齿条ⅰ2
‑
14带动齿轮ⅰ2
‑
15转动,齿轮ⅰ2
‑
15带动卷绳辊2
‑
16转动,卷绳辊2
‑
16将卷绳2
‑
17卷起,卷绳2
‑
17经滚轮2
‑
19变向横向拉动齿条ⅱ2
‑
20沿齿条ⅱ滑轨2
‑
21滑动,齿条ⅱ2
‑
20带动齿轮ⅱ2
‑
24转动,齿轮ⅱ2
‑
24带动齿轮ⅱ轴2
‑
25转动,齿轮ⅱ轴2
‑
25带动开合底门2
‑
26张开,升降支架2
‑
11带动空箱升起,开合底门2
‑
26张开带动玻璃瓶落下,这样减缓坠落高度使玻璃瓶受震最小,当升降支架2
‑
11的质量传感器感应到玻璃瓶的重量后,控制液压体统带动伸缩杆2
‑
13下降,升降支架2
‑
11下降到底部后被后续空纸箱推至封装运输带3
‑
2上。
31.具体实施方式四:
32.下面结合图1
‑
11说明本实施方式,本实施方式对实施方式一作进一步说明,运输辊3
‑
1与动力相连接,动力带动运输辊3
‑
1转动,两个运输辊3
‑
1带动封装运输带3
‑
2运动将带瓶纸箱运输,运输辊3
‑
1带动带轮ⅲ3
‑
4转动,两个带轮ⅲ3
‑
4通过皮带ⅲ3
‑
5带动扇叶轴3
‑
6转动,扇叶轴3
‑
6带动扇叶3
‑
8转动通过排气孔3
‑
11将扇叶罩3
‑
9内空气排出,扇叶罩3
‑
9经吸气孔3
‑
10将空气吸入,两侧扇叶罩3
‑
9同时产生吸力将纸箱相对的两侧立起的箱盖向外吸起,未吸起的两侧落下,封装运输带3
‑
2将纸箱运至封箱室3
‑
13,封箱室3
‑
13的斜面将还立起的两个箱盖压平,等待胶带封箱即可。
33.当然,上述说明并非对本发明的限制,本发明也不仅限于上述举例,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1