一种袋装面粉仓内搬运车及其工作方法
1.本发明属于物流搬运车技术领域,具体涉及一种袋装面粉仓内搬运车及其工作方法。
背景技术:
2.随着搬运车技术的不断发展,人们对搬运车的使用已经应用到了各行各业,然而目前人们虽然在搬运车领域进行了大量的研究,但是更多的是在面对提取目标为刚性的时候,对于柔性且易损的目标的提取搬运关注极少,于是目前在该领域的技术还很不成熟,应用和设计方案均较少。本发明针对目前面粉仓库中袋装面粉的搬运方式,为了提高面粉袋在搬运过程中的可靠性,充分考虑到了面粉袋的柔性、易损性、易燃易爆性等性质,提出了一种袋装面粉仓内搬运车,能够以相对温和的方式在面粉仓库内实现可靠的面粉袋搬运过程。
技术实现要素:
3.本发明的目的在于提供一种袋装面粉仓内搬运车及其工作方法。
4.一种袋装面粉仓内搬运车,包括移动支撑模块、承重模块、输送模块和夹取模块。承重模块安装在移动支撑模块上,且能够在动力元件的驱动下绕水平轴线翻转。所述的输送模块包括输送框、上料输送机、翻板组件和带式束缚组件。输送模块安装在输送框上,且能够在动力元件的驱动下滑动。上料输送机安装在输送框上。夹取模块安装在上料输送机上,且夹持口朝向输送模块向外推出的方向。
5.所述的翻板组件安装在上料输送机的能够向外推出的端部。翻板组件包括合页舵机和两用挡板。两用挡板与上料输送机的端部铰接,能够在合页舵机的驱动下翻转。两用挡板具有一块或并排设置的多块。两用挡板具有两个工作姿态,分别为铲板工作姿态和挡板工作姿态。铲板工作姿态下,两用挡板的顶面与上料输送机的输送面平齐。挡板工作姿态下,两用挡板高于上料输送机的输送面,能够阻挡上料输送机上的货物下滑。
6.一个或多个带式束缚组件安装在上料输送机上。带式束缚组件包括定位皮带和皮带电机。定位皮带的一端与输送框的一侧固定。定位皮带从上料输送机的输送面上方绕过,另一端连接至输送框的另一侧。定位皮带在皮带电机的驱动下收紧或放松。
7.作为优选,所述移动支撑模块包括移动座、驱动轮和万向轮;移动座的两端均设置有两个延伸臂。四根延伸臂的底端均安装有万向轮。两个驱动轮分别安装在移动座两侧,并由两个电机分别驱动。移动座的前端安装有循迹摄像头。
8.作为优选,移动支撑模块与承重模块之间设置有液压缸。液压缸的缸体、活塞杆与移动支撑模块、承重模块分别铰接。
9.作为优选,所述的承重模块与输送模块之间设置有滑移驱动组件。滑移驱动组件包括丝杠电机和滚珠丝杠。丝杠电机安装在承重模块上。由丝杠电机驱动的滚珠丝杠支承在承重模块上。输送框的底部固定有丝杠滑块。丝杠滑块与滚珠丝杠构成螺旋副。
10.作为优选,所述承重模块的端部设置有回止接近开关。回止接近开关用于对输送模块进行限位。
11.作为优选,所述的输送框上设置有内轨道滑块和伸出式轨道滑块。内轨道滑块共有四个,分别安装在输送框底面中部的两侧及后端的两侧;伸出式轨道滑块共有两个,分别安装在输送框底面前端的两侧。内轨道滑块上设置有呈矩形排列的四个第一滚子,其两两一组分布在承重模块边缘处的两侧,抱住承重框。伸出式轨道滑块上设置有并排的两个第二滚子;两个第二滚子位于承重框的同一侧。
12.作为优选,皮带电机安装在输送框的侧部。定位皮带的非固定端缠绕在皮带电机输出轴的绕带轮上。
13.作为优选,所述的输送模块还包括电机安装板和定位摄像头。电机安装板固定在输送框顶面的远离翻板组件的端部。定位摄像头固定在电机安装板正面的中部。上料输送机包括传送带驱动电机、第二带传动组件、滚子固定板、传送带滚子和传送带。两块滚子固定板分别安装在输送框顶面的两侧。两块滚子固定板之间支承有依次间隔排列的多根传送带滚子。各传送带滚子通过传送带连接。两个传送带驱动电机对中安装在电机安装板的两端。两个传送带驱动电机的输出轴与其中一根传送带滚子的两端分别通过第二带传动组件连接,实现动力传递。
14.作为优选,所述夹取模块包括调整臂、安装块、保护块、齿轮驱动电机、导向滑杆和中央齿轮。上料输送机的两侧均固定有槽口滑轨。导向滑杆的两端分别伸入两条槽口滑轨上的滑槽中。安装块固定在导向滑杆上,并与传送带固定。所述安装块的正面开设有通孔,设置有两根滑轨。两根滑轨对中设置在通孔的两侧。齿轮驱动电机安装在安装块背面,其输出轴穿过通孔与中央齿轮固定。关于中央齿轮轴线中心对称的两根调整臂与两根滑轨分别构成滑动副。调整臂上设有与中央齿轮啮合的齿条结构。调整臂的外端朝向上料输送机的前端。两根调整臂的外端设置有相互正对的内凹夹持口。内凹夹持口的外端设置有突出夹块。突出夹块用于夹持住面粉袋开口处的绑带扎结位置。保护块固定在安装块的这面,且位于中央齿轮的外侧,用于避免中央齿轮被直接碰撞。
15.该袋装面粉仓内搬运车的工作方法,具体如下:
16.步骤一、当收到搬运指令时,搬运车移动到目标面粉袋处,且朝向目标面粉袋的开口绑带。在距离目标面粉袋预设距离时,合页舵机驱动两用挡板张开;承重模块倾斜翻转至预设角度;输送模块相对于承重模块向外推出。
17.步骤二、夹取模块受到上料输送机的驱动,向下移动。搬运车向目标面粉袋移动,使得夹取模块移动到能够夹住目标面粉袋的开口绑带的位置。
18.步骤三、夹取模块夹住目标面粉袋后,搬运车向前移动,两用挡板将目标面粉袋铲起;同时,上料输送机带动目标面粉袋倾斜向上输送。搬运车的行进速度v
机
=v
带
cosθ;其中,θ为上料输送机的倾斜角度;v
带
为上料输送机的输送速度。
19.步骤四、当目标面粉袋完全脱离地面后,上料输送机停止输送,带式束缚组件的定位皮带在皮带电机的驱动下收紧。承重模块恢复到水平状态。输送模块相对于承重模块向内复位。合页舵机驱动两用挡板回复到挡板工作姿态。
20.步骤五、搬运车携带目标面粉袋行驶到目标终点位置后,自动卸下目标面粉袋。
21.本发明具有的有益效果是:
22.1.本发明通过搬运车前进与倾斜状态的上料输送机向后输送相配合,使得柔软的面粉袋在不发生拖拽的情况下完成了面粉袋的抬起动作,实现了高自动化的仓内袋装面粉运输。
23.2.本发明通过采取夹取模块和定位皮带相配合,保证了在装载和运载的过程中面粉袋的安全性。
24.3.本发明中通过采用滑轨机构,在相同面积集成了多个模块,显著减小了搬运车的体积。
25.4.本发明采用多摄像头定位,实现在搬运过程中的闭环控制,显著提高了搬运车的可靠性和稳定性。此外,本发明采用液压缸和滚珠丝杠相配合,使得输送模块到达指定工作姿态,结构简单稳定。
附图说明
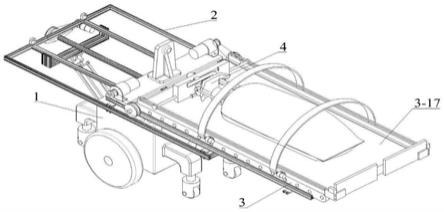
26.图1是本发明的整体结构的示意图;
27.图2是本发明中移动支撑模块的示意图;
28.图3是本发明中承重模块的示意图;
29.图4是本发明中输送模块的第一张示意图;
30.图5是本发明中输送模块的第二张示意图;
31.图6是本发明中内轨道滑块的示意图;
32.图7是本发明中伸出式轨道滑块的示意图;
33.图8是本发明中夹取模块的第一张示意图;
34.图9是本发明中夹取模块的第二张示意图;
35.图10是本发明中安装块的示意图;
36.图11是本发明的工作原理图。
具体实施方式
37.以下结合附图对本发明作进一步说明,其中记载的“前”、“后”,以行进方向为基准。
38.如图1所示,一种袋装面粉仓内搬运车,包括移动支撑模块1、承重模块2、输送模块3和夹取模块4。承重模块2通过铰链方式安装在移动支撑模块1上,输送模块3通过滑轨连接安装在承重模块2上,夹取模块4安装在输送模块3上。
39.如图2所示,所述移动支撑模块1包括移动座1-1、液压缸1-2、驱动轮1-3和万向轮1-4;移动座的两端均设置有两个延伸臂1-5。四根延伸臂1-5的底端均安装有万向轮1-4。两个驱动轮1-3分别安装在移动座1-1两侧,并由两个电机分别驱动。移动座1-1的前端安装有循迹摄像头1-6。液压缸1-2的缸体端部与移动座1-1后端底部通过铰链连接;移动座1-1的顶部前侧设置有对称分布的两个铰接口1-7,用以与承重模块2铰链连接。
40.如图3所示,所述承重模块2包括承重框2-1、滑移驱动组件、回止接近开关2-4、液压缸铰接口2-5和铰接块2-7。液压缸铰接口2-5安装在承重框2-1底部的后端,用于与液压缸输出轴铰链连接。两个铰接块2-7安装在承重框2-1的底部中间靠前位置。铰接块2-7与移动座1-1上的铰接口1-7转动连接。滑移驱动组件包括丝杠电机2-1、第一带传动组件2-3和
滚珠丝杠2-6。丝杠电机2-2安装在承重框2-1的后端,滚珠丝杠2-6沿承重框2-1长边安装在承重框2-1中央下侧。滚珠丝杠2-6与丝杠电机2-2的输出轴通过第一带传动组件2-3连接和动力传递。回止接近开关2-4安装在承重框2-1顶部的后端。
41.如图1、4、5、6和7所示,输送模块3包括输送框3-1、电机安装板3-2、定位摄像头3-3、内轨道滑块3-7、伸出式轨道滑块3-8、丝杠滑块3-15、槽口滑轨3-12、上料输送机、翻板组件和带式束缚组件。丝杠滑块3-15安装在输送框3-1的底部,其靠近承重框2-1前端的一侧安装有接近开关3-16。丝杠滑块3-15与滚珠丝杠2-6构成螺旋副。
42.内轨道滑块3-7共有四个,分别安装在输送框3-1底面中部的两侧及后端的两侧;伸出式轨道滑块3-8共有两个,分别安装在输送框3-1底面前端的两侧。内轨道滑块3-7上设置有呈矩形排列的四个第一滚子3-7-1,其两两一组分布在承重框2-1边缘支撑型材的两侧,抱住承重框2-1,实现输送框3-1与承重框2-1的滑动连接。伸出式轨道滑块3-8上设置有并排的两个第二滚子3-8-1;两个第二滚子3-8-1位于承重框2-1的同一侧,在运输过程中提高输送框3-1的稳定性。
43.电机安装板3-2和上料输送机均安装在输送框3-1上。电机安装板3-2位于输送框3-1顶部的后端。上料输送机包括传送带驱动电机3-4、第二带传动组件3-5、滚子固定板3-6、传送带滚子3-11和传送带3-17。两块滚子固定板3-6分别安装在输送框3-1顶面的两侧。两块滚子固定板3-6之间支承有依次间隔排列的多根传送带滚子3-11。各传送带滚子3-11通过传送带3-17连接。两个传送带驱动电机3-4对中安装在电机安装板3-2的两端。两个传送带驱动电机3-4的输出轴与其中一根传送带滚子3-11的两端分别通过第二带传动组件3-5连接,实现动力传递。
44.多个带式束缚组件沿上料输送机输送方向间隔排列。带式束缚组件包括定位皮带3-13和皮带电机3-14。定位皮带3-13的一端与输送框3-1的一侧固定。皮带电机3-14安装在输送框3-1的另一侧。定位皮带3-13的另一端缠绕在皮带电机3-14输出轴的绕带轮上。
45.翻板组件安装在输送模块3的前端。翻板组件包括合页舵机3-9和两用挡板3-10。两个合页舵机3-9分别安装在输送框3-1前端的两侧;两块两用挡板3-10并排设置在上料输送机的前端,且底部边缘与两块滚子固定板3-6分别铰接。两块两用挡板3-10由两个合页舵机3-9分别驱动翻转。两块两用挡板3-10在向外翻开的状态下能够用于铲起面粉袋,向内收回的状态下用于阻挡面粉袋从上料输送机上掉落。
46.如图8、9和10所示,所述夹取模块4包括调整臂4-1、安装块4-2、保护块4-3、齿轮驱动电机4-4、导向滑杆4-5和中央齿轮4-7。两块滚子固定板3-6的顶部均固定有槽口滑轨3-12。导向滑杆4-5的两端分别伸入两条槽口滑轨3-12上的滑槽中。安装块4-2固定在导向滑杆4-5上,并与传送带3-17固定。所述安装块4-2的正面开设有通孔4-3-3,设置有两根滑轨4-3-1和两根保护块安装柱4-3-2。两根滑轨4-3-1对中设置在通孔4-3-3的两侧。两根保护块安装柱4-3-2位于两根滑轨4-3-1,且对中设置在通孔4-3-3的两侧。齿轮驱动电机4-4安装在安装块4-2背面,其输出轴穿过通孔4-3-3与中央齿轮4-7固定。关于中央齿轮4-7轴线中心对称的两根调整臂4-1与两根滑轨4-3-1分别构成滑动副。调整臂4-1上设有与中央齿轮4-7啮合的齿条结构4-8。调整臂4-1的外端朝向上料输送机的前端。两根调整臂4-1的外端设置有相互正对的内凹夹持口4-6。内凹夹持口4-6的外端设置有突出夹块。突出夹块用于夹持住面粉袋开口处的绑带扎结位置。保护块4-3固定在两个保护块安装柱4-3-2上。保
护块4-3位于中央齿轮4-7的外侧,避免面粉袋直接碰撞到中央齿轮4-7。
47.该袋装面粉仓内搬运车的工作方法,具体如下:
48.当收到搬运指令时,搬运车先通过循迹摄像头找到目标面粉袋,移动并靠近目标面粉袋的开口绑带处,在距离目标面粉袋预设距离时,合页舵机驱动两用挡板张开,液压缸推进承重模块使其倾斜一定角度,丝杠电机正转使滚珠丝杆推进输送模块倾斜下放;
49.夹取模块受到上料输送机的驱动,向下移动;再利用定位摄像头根据目标面粉袋的位置进行机器微调,微调结束后齿轮驱动电机旋转驱动两个调整臂张开,搬运车缓慢向目标面粉袋移动,在两个调整臂的内凹夹持口4-6到达目标面粉袋的开口绑带的两侧时,齿轮驱动电机驱动两个调整臂夹紧,使得目标面粉袋的开口绑带处被夹住;之后搬运车向前移动,两用挡板将目标面粉袋铲起;同时,传送带驱动电机工作驱动传送带运动,带动目标面粉袋沿传送带倾斜向上输送。当目标面粉袋完全脱离地面后,传送带驱动电机停转,带式束缚组件的定位皮带3-13在皮带电机3-14的驱动下收紧。丝杠电机反转,滚珠丝杠将输送模块收回,液压缸收回,承重模块恢复至水平状态,合页舵机驱动两用挡板向内翻转复位,搬运车再通过循迹摄像头根据预定轨迹将目标面粉袋运载至目标位置,完成搬运过程。
50.如图11所示,该搬运车的装载面粉袋的原理如下:
51.在调整好搬运车位姿后,夹取模块能够夹住目标面粉袋最容易抓取的开口绑带位置;定位皮带能够保证目标面粉袋在运载过程中保持固定的姿态;避免因外界因素导致可能出现的意外情况。在装载过程中,目标面粉袋受到传送带的摩擦力ff和支持力fn,会以一定的速度运送至传送带上。
52.为了尽量减小装载过程中对目标面粉袋可能存在的伤害,设定传送带运动速度与搬运车向前移动的速度关系为:
[0053]v机
=v
带
cosθ
[0054]
其中,θ为承重模块倾斜的角度,v
机
为搬运车向前移动的速度,v
带
为传送带的运动速度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1