管体加工输送系统的制作方法
1.本发明属于高速铁路接触网配件加工技术领域,具体涉及管体加工输送系统。
背景技术:
2.目前,高速铁路接触网中的腕臂装置主要由管体(通常为圆管)以及装配在其上的各类抱箍组成。由于整个高铁路段每隔一段就需要一组腕臂,且每组腕臂的长度以及抱箍的装配位置均不一样,这样会导致高铁建设需要的腕臂数量多、种类多,而目前的管体原料加工时,大都是采用人工方式对管体进行逐一加工,导致后续的腕臂装置装配效率难以保证。
技术实现要素:
3.本发明的目的是:旨在提供一种管体加工输送系统,可以实现对管体进行自动输送及切割、钻孔的加工,提高了后续对管体加工及腕臂装置装配的生产效率。
4.为实现上述技术目的,本发明采用的技术方案如下:
5.本技术提供的一种管体加工输送系统,包括管体输送机构,所述管体输送机构包括支撑架、多个第一安装板、管体夹紧装置、管体输送装置和导轨移动机构;
6.多个所述第一安装板间隔设置在所述支撑架的上端;
7.所述导轨移动机构设置在每个所述第一安装板的底面一侧位置,所述导轨移动机构连接有第二安装板,并能够带动所述第二安装板沿所述支撑架的横向移动;所述第一安装板及所述第二安装板的底面均设置有管体夹紧装置和管体输送装置,并且,每一个第一安装板和其下端的第二安装板上安装的多个管体夹紧装置的夹紧口处于同一水平轴线上。
8.进一步的,所述管体输送装置包括第一连接板、输送气缸和输送滚轮;所述第一连接板用于连接第一安装板或第二安装板;所述输送气缸与所述第一连接板连接,所述输送气缸的伸缩杆前端设置第二连接板,所述输送滚轮通过轴可转动地与所述第二连接板连接,所述输送气缸能够带动所述输送滚轮水平移动。
9.进一步的,所述管体夹紧装置包括第一分体气缸、第二分体气缸和夹持体;所述第一分体气缸水平设置在所述第一安装板或第二安装板上,所述第二分体气缸水平设置在所述第一分体气缸的底部,并且所述第一分体气缸、第二分体气缸的伸缩杆的移动方向相反,所述第一分体气缸、第二分体气缸的伸缩杆上分别连接用于夹持管体的夹持体。
10.进一步的,所述导轨移动机构包括第一驱动电机、第一丝杠、第一滑块和第一导轨;第一驱动电机与第一丝杠连接,两个第一导轨分别设置在第一丝杠的两侧,所述第一滑块转动连接于所述第一丝杠上,所述第二安装板上端面与所述第一滑块连接,并且,所述第二安装板的上端面两侧通过第二滑块与所述第一导轨滑动连接。
11.进一步的,还包括管体加工机构,其位于所述管体输送机构的下方,所述管体加工机构包括第一导向装置、切割装置、钻孔装置、第一支撑座和牵引定位组件;
12.所述第一导向装置设置在管体原料输送方向的上游位置;
13.所述第一支撑座位于所述第一导向装置的下游位置;
14.所述切割装置和所述钻孔装置分别位于所述第一导向装置及所述第一支撑座之间,以对管道原料进行加工;
15.所述牵引定位组件通过第一导轨移动机构安装于所述第一支撑座上,并且,所述牵引定位组件能够在所述第一导轨移动机构的带动下沿所述第一支撑座的纵向方向移动;
16.所述牵引定位组件包括第一支撑板体、第二导轨移动机构、第二支撑板体和第一夹持装置;
17.所述第一支撑板体设置在第一导轨移动机构上,所述第二支撑板体通过所述第二导轨移动机构安装于所述第一支撑板体上,所述第一夹持装置设置在所述第二支撑板体上用以对管体原料进行夹持,所述第一夹持装置能够带动管体原料沿所述第一支撑座的横向方向移动。
18.进一步的,所述牵引定位组件还包括至少一个辅助定位支撑组件,所述辅助定位支撑组件设置在第一支撑板体和/或第二支撑板体上;
19.所述辅助定位支撑组件包括辅助支撑座和导向滚轮,所述辅助支撑座的上端可转动地连接所述导向滚轮;
20.所述辅助定位支撑组件还包括压板定位组件,所述压板定位组件包括第一气缸、第二气缸和压板体,所述第一气缸设置在所述第一支撑板体上,所述第一气缸的伸缩杆与所述第二气缸连接,以驱动所述第二气缸沿高度方向移动,所述第二气缸为旋转气缸,所述第二气缸的转动杆与所述压板体连接,使得所述压板体能够压合于导向滚轮上的管体上。
21.进一步的,所述第一夹持装置包括第三气缸、第四气缸和夹持块;所述第三气缸水平设置在所述第二支撑板体上,所述第四气缸水平设置在所述第三气缸上,并且所述第三气缸和第四气缸的伸缩杆移动方向相反,所述第三气缸、第四气缸的伸缩杆上分别连接有用于夹持管体的夹持块。
22.进一步的,所述管体加工机构还包括至少一个顶升装置,所述顶升装置设置在所述第一支撑板体和/或第二支撑板体上,所述顶升装置用于将加工后的圆管顶升至牵引定位组件上方的输送工位。
23.进一步的,所述顶升装置包括顶升气缸和夹爪装置,所述夹爪装置通过连接板与顶升气缸伸缩杆连接,所述夹爪装置用于夹持加工后的管体。
24.进一步的,所述管体加工机构还包括吸尘装置,吸尘器用于对切割装置和钻孔装置所处工位进行吸尘。
25.采用上述技术方案,相比于现有技术,本技术提供的管体加工输送系统,具有如下技术效果:
26.该管体加工输送系统中,包括管体输送机构,管体输送机构包括支撑架、多个第一安装板、管体夹紧装置、管体输送装置和导轨移动机构;多个第一安装板间隔设置在支撑架的上端;导轨移动机构设置在每个第一安装板的底面一侧位置,导轨移动机构连接有第二安装板,并能够带动第二安装板沿支撑架的横向移动;第一安装板及第二安装板的底面均设置有管体夹紧装置和管体输送装置,并且,每一个第一安装板和其下端的第二安装板上安装的多个管体夹紧装置的夹紧口处于同一水平轴线上。利用该加工输送系统,管体在加工完成后可以通过管体夹紧装置、管体输送装置和导轨移动机构的连动作,分别向上方四
个第一安装板的位置进行管体的转移,实现一个加工工位供给四个装配工位的功能,避免因加工时间短而装配时间长带来的窝工现象,提高了生产效率。
附图说明
27.本发明可以通过附图给出的非限定性实施例进一步说明;
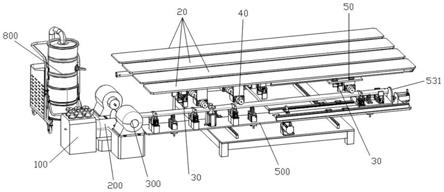
28.图1为本发明提供的管体加工输送系统的结构示意图;
29.图2为管体输送机构的整体结构示意图;
30.图3为管体输送机构的局部结构示意图;
31.图4为管体加工机构的结构示意图;
32.图5为图4中a处的放大示意图(省略定位挡板);
33.图6为辅助定位支撑组件的结构示意图;
34.图7为顶升装置的结构示意图。
35.标号:20-第一安装板;30-管体夹紧装置;31-第一分体气缸;32-第二分体气缸;33-夹持体;40-管体输送装置;41-第一连接板;42-输送气缸;43-输送滚轮;44-第二连接板;50-导轨移动机构;51-第一驱动电机;52-第一丝杠;53-第一导轨;60-第二安装板;
36.100-第一导向装置;110-第一定位座;120-定位滚轮;200-切割装置;300-钻孔装置;400-第一支撑座;500-牵引定位组件;510-第一支撑板体;520-第二导轨移动机构;530-第二支撑板体;531-定位挡板;540-第一夹持装置;541-第三气缸;542-第四气缸;543-夹持块;550-辅助定位支撑组件;551-辅助支撑座;552-导向滚轮;553-第一气缸;554-第二气缸;555-压板体;600-第一导轨移动机构;700-顶升装置;710-顶升气缸;720-夹爪装置;721-驱动气缸;722-装配座;723-夹爪;724-安装槽;730-连接板;800-吸尘装置。
具体实施方式
37.为了使本领域的技术人员可以更好地理解本发明,下面结合附图和实施例对本发明技术方案进一步说明。
38.如图1至图3所示,本技术实施例提供的一种管体加工输送系统,包括管体输送机构,管体输送机构包括支撑架(省略未在图中示意出)、多个第一安装板20、管体夹紧装置30、管体输送装置40和导轨移动机构50;
39.多个第一安装板20设置在支撑架的上端;本实施例中,以设置四个第一安装板20为例进行说明,四个第一安装板20在支撑架上分别平行且按照一定间隔布置;
40.导轨移动机构50设置在每个第一安装板20的底面一侧位置,导轨移动机构50连接有第二安装板60,并且导轨移动机构50能够带动第二安装板60沿支撑架的横向移动;第一安装板20及第二安装板60的底面均设置有管体夹紧装置30和管体输送装置40,管体夹紧装置30用于夹紧管体,管体输送装置40用于支撑管体的底部,并辅助管体进行输送,并且,每一个第一安装板20和其下端的第二安装板60上安装的多个管体夹紧装置30的夹紧口处于同一水平轴线上,以确保管体运输的方向得到保障。
41.实际应用时,加工完成后的管体可以通过管体夹紧装置30的夹持作用实现固定,然后利用管体输送装置40对管体的底部进行支撑,需要输送管体时,位于第一安装板20上的所有的管体夹紧装置30松开管体,利用导轨移动机构50带动第二安装板60上的管体夹紧
装置30及管体输送装置40水平移动,从而带动管体移动至下一加工工位,采用上述结构,可以将钻孔、切割后的管体分别向上方四个位置(即四个第一安装板20对应工位)进行管体的转移,实现一个加工工位供给四个装配工位的功能,避免因加工时间短而装配时间长带来的窝工现象,提高了生产效率。
42.作为一个可选实施方案,参照图3,管体输送装置40包括第一连接板41、输送气缸42和输送滚轮43;第一连接板41用于连接第一安装板20或者第二安装板60;输送气缸42与第一连接板41连接,输送气缸42的伸缩杆能够在水平方向上移动,输送气缸42的伸缩杆前端设置第二连接板44,输送滚轮43通过轴可转动地与第二连接板44连接,输送气缸42能够带动输送滚轮43水平移动;应用时,由于输送滚轮43需要对管体的下方进行支撑,在管体向上移动由管体夹紧装置30夹持过程中,输送滚轮43会对管体产生干涉,因此,当管体向上输送时,输送气缸42的伸缩杆回缩,带动输送滚轮43避开管体向上移动的轨迹,当管体被管体夹紧装置30夹持后,输送气缸42的伸缩杆伸长,使输送滚轮43移动至管体的下方,以对管体提供支撑。
43.作为一个可选实施方案,管体夹紧装置30包括第一分体气缸31、第二分体气缸32和夹持体33;第一分体气缸31水平设置在第一安装板20或第二安装板60上,第二分体气缸32水平设置在第一分体气缸31的底部,并且第一分体气缸31、第二分体气缸32的伸缩杆的移动方向相反,第一分体气缸31、第二分体气缸32的伸缩杆上分别连接用于夹持管体的夹持体33;利用第一分体气缸31、第二分体气缸32的共同动作,可以实现夹持体33对管体的夹持或者放开的动作。
44.作为一个可选实施方案,导轨移动机构50包括第一驱动电机51、第一丝杠52、第一滑块和第一导轨53;第一驱动电机51设置在第一安装板20上,第一丝杠52的通过相应丝杠安装座安装在第一安装板20上,第一驱动电机51与第一丝杠52连接,以驱动丝杠旋转,两个第一导轨设置在第一安装板20上,并且第一导轨分别设置在第一丝杠52的两侧,第一滑块转动连接于第一丝杠52上,第二安装板60上端面与第一滑块连接,并且,第二安装板60的上端面两侧通过第二滑块与第一导轨滑动连接。利用第一驱动电机51驱动第一丝杠52旋转,进而转化为第一滑块带动第二安装板60及其上面的部件沿直线移动。
45.参照图1、图4-图7所示,本技术实施例提供的一种管体加工输送系统,还包括管体加工机构,其位于管体输送机构的下方,该管体加工机构包括第一导向装置100、切割装置200、钻孔装置300、第一支撑座400和牵引定位组件500;
46.其中,第一导向装置100设置在管体原料输送方向的上游位置,用于对待加工的管体原料的输送方向进行导向;
47.第一支撑座400位于第一导向装置100的下游位置;
48.切割装置200和钻孔装置300分别位于第一导向装置100及第一支撑座400之间,切割装置200用于对预设长度的管道原料进行接切割,以符合长度设计要求,钻孔装置300则用于对管道的预设位置进行打孔,以便于在管道上安装其他配件;
49.牵引定位组件500通过第一导轨移动机构600安装于第一支撑座400上,并且,牵引定位组件500能够在第一导轨移动机构600的带动下沿第一支撑座400的纵向方向移动;
50.牵引定位组件500包括第一支撑板体510、第二导轨移动机构520、第二支撑板体530和第一夹持装置540;
51.第一支撑板体510设置在第一导轨移动机构600上,并能够在第一导轨移动机构600带动下移动,第二支撑板体530通过第二导轨移动机构520安装于第一支撑板体510上,在第二导轨移动机构520的带动下,第二支撑板体530可以沿着第一支撑座400的横向方向移动;
52.第一夹持装置540设置在第二支撑板体530上,用以对管体原料进行夹持,利用第一夹持装置540能够带动管体原料沿第一支撑座400的横向方向移动到预设位置,从而便于确定管体原料的待加工长度,以便于对管体原料进行切割和钻孔工作。
53.作为一个可选实施方案,第一导向装置100包括第一定位座110和两排相对设置的多个定位滚轮120,定位滚轮120通过轴可转动地与第一定位座110连接,两排定位滚轮120之间形成用于容纳管体移动的空间,从而对管体移动的方位进行限制。
54.本实施例技术方案中,切割装置200采用电机带动切割刀盘的形式,对管体进行切割,电机可以通过升降装置安装在基座上,升降装置可以采用液压缸、电动推杆或者丝杠导轨移动副等部件。
55.同样地,钻孔装置300采用电机带动钻头形式对管体进行钻孔,电机可以通过水平移动装置安装在基座上,水平移动装置同样可以采用液压缸、电动推杆或者丝杠导轨移动副等部件。
56.本技术实施方案中,第一导轨移动机构600和第二导轨移动机构520均采用常规的滚柱直线导轨副,通过电机驱动丝杠形式,驱使第一导轨移动机构600和第二导轨移动机构520中的相应的滑块在导轨上移动,本实施例中不再对其具体结构和工作原理进行详细说明。
57.作为一个可选实施方案,第二支撑板体530的远离第一导向装置100的一侧设置有定位挡板531,定位挡板531用于对管体的端部限位。
58.作为一个可选实施方案,参照图6,牵引定位组件500还包括至少一个辅助定位支撑组件550,辅助定位支撑组件550设置在第一支撑板体510和/或第二支撑板体530上;
59.辅助定位支撑组件550包括辅助支撑座551和导向滚轮552,辅助支撑座551的上端可转动地连接导向滚轮552,导向滚轮552起到对管体的支撑作用。
60.实际应用时,辅助定位支撑组件550可以设置多个,分别设置在第一支撑板体510和第二支撑板体530上,以对管体的长度方向进行充分支撑。
61.作为一个可选实施方案,辅助定位支撑组件550还包括压板定位组件,压板定位组件包括第一气缸553、第二气缸554和压板体555,第一气缸553设置在第一支撑板体510上,第一气缸553的伸缩杆与第二气缸554连接,以驱动第二气缸554沿高度方向移动,第二气缸554为旋转气缸,第二气缸554的转动杆与压板体555连接,使得压板体555能够压合于导向滚轮552上的管体上,此外,压板体555的底面设置为与管体外形适配的凹弧状,从而对管体的上端面进行压合,保障在对管体进行切割和钻孔过程中,管体不会产生震颤而影响加工精度。
62.作为一个可选实施方案,参照图5,第一夹持装置540包括第三气缸541、第四气缸542和两个夹持块543;第三气缸541水平设置在第二支撑板体530上,第四气缸542水平设置在第三气缸541上,并且第三气缸541和第四气缸542的伸缩杆移动方向相反,第三气缸541、第四气缸542的伸缩杆上分别连接有用于夹持管体的夹持块543,利用夹持块543可以夹紧
管体并带动管体移动。
63.作为一个可选实施方案,本实施例中的管体加工输送系统还包括至少一个顶升装置700,顶升装置700设置在第一支撑板体510和/或第二支撑板体530上,顶升装置700用于将加工后的圆管顶升至牵引定位组件500上方的管体输送机构中,以便对管体进行输送至后序加工工位。
64.具体的,顶升装置700包括顶升气缸710和夹爪装置720,顶升气缸710可以设置两个,夹爪装置720通过连接板730与顶升气缸710伸缩杆连接,夹爪装置720用于夹持加工后的管体。
65.本实施例中,夹爪装置720包括驱动气缸721、装配座722和夹爪723,驱动气缸721设置在顶升气缸710之间,装配座722的内部贯通设置有安装孔,装配座722的上端对称设置安装槽724,安装槽724位于安装孔的相对侧,驱动气缸721的伸缩杆深入至安装孔内,两个夹爪723分别通过轴与驱动气缸721的伸缩杆的端部转动连接,同时,两个夹爪723还通过轴分别与对应的安装槽724转动连接,驱动气缸721的伸缩杆往复移动时,可以驱使两个夹爪张开或者闭合,以实现对管体的夹持或者释放动作。
66.需要说明的是,本实施例中的辅助定位支撑组件550、第一夹持装置540、顶升装置700都同轴设置。
67.作为一个可选实施方案,本实施例中的管体加工输送系统还包括吸尘装置800,吸尘装置800用于对切割装置200和钻孔装置300所处工位进行吸尘,避免加工产生的颗粒物对空气造成污染。
68.下面说明本实施例提供的管体加工输送系统的加工方法:
69.初始状态下:
70.待加工管体原料经第一导向装置100移动至牵引定位组件500上,并由第一夹持装置540带动管体原料沿横向方向移动至预设位置,利用辅助定位支撑组件550对管体原料进行定位;
71.加工状态下:
72.利用切割装置200及钻孔装置300分别对管体进行加工,以满足设计要求;
73.输送状态下:
74.加工完毕后,第一夹持装置540及辅助定位支撑组件550共同带动管体沿纵向移动至预设位置(即对应上方的管体输送机构中的任一个工位),然后第一夹持装置540和辅助定位支撑组件550分别松开管体,启动顶升装置700夹紧圆管,并带动管体向上移动至预设高度;
75.利用管体输送机构中的管体夹紧装置对管体进行夹持,同时配合管体输送装置对加工后的管体输送至下一加工工位。
76.利用本产品,可以实现对管体原料(即待加工管体)进行自动输送及加工,提高了后续对管体原料加工及腕臂装置装配的生产效率。
77.上述实施例仅示例性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1