自动下料翻转平台的制作方法
1.本发明涉及机械设备技术领域,具体为自动下料翻转平台。
背景技术:
2.下料是指确定制作某个设备或产品所需的材料形状、数量或质量后,从整个或整批材料中取下一定形状、数量或质量的材料的操作过程,而有些产品需要对双面进行下料加工,此时则需要进行对物料进行翻转操作。
3.现有的进行下料机构在进行翻转时,通常需要人工对物料的正反面进行翻转操作,但人工操作费时费力;现有的翻转平台通常采用夹具夹持物料进行翻转输送,在此过程中,夹具的材质较硬,可能会对物料进行损伤;人工在进行上料时,如将物料送至高处的传送装置上进行输送时,需要人工通过梯子等工具进行上料,可能存在人员受伤隐患,为此我们提出了自动下料翻转平台。
技术实现要素:
4.本发明的目的在于提供自动下料翻转平台,以解决上述背景技术中提出了需要人工对物料的正反面进行翻转操作,夹具的材质较硬对物料进行损伤,人工通过梯子等工具进行上料,可能存在人员受伤隐患的问题。
5.为实现上述目的,本发明提供如下技术方案:自动下料翻转平台,包括立柱、顶杆、z轴滑轨、连接轨道、第二横杆、控制箱和回收箱,所述顶杆固定连接在所述立柱的顶部,所述z轴滑轨位于所述顶杆的内侧壁之间,所述连接轨道固定连接在所述立柱的右侧壁上侧之间,所述第二横杆固定连接在右侧和中间所述立柱的内侧壁之间,所述控制箱固定连接在左侧所述立柱的左侧壁下侧,所述回收箱位于所述顶杆的左下方,所述顶杆的内侧壁左右两侧之间固定连接有y轴滑轨,所述y轴滑轨的末端设有滑轨控制器,所述y轴滑轨的外侧壁滑动连接有第一滑块,所述z轴滑轨前侧壁下侧中间开有滑槽,所述滑槽的内腔滑动连接有滑件,所述滑件的前侧壁左侧固定连接有第一位置传感器,所述滑件的后侧壁右侧中间固定连接有第二电机,且所述第二电机的输出端贯穿于所述滑件的后侧壁右侧并延伸至其前侧,所述第二电机的输出端固定连接有连接转盘,所述连接转盘的前侧壁固定连接有电磁控制器,所述电磁控制器的前侧壁固定连接有电磁接触杆,所述电磁控制器的前侧壁中间固定连接有第二位置传感器,左侧所述连接轨道的外侧壁滑动连接有第三滑块,所述第三滑块右端转动连接有螺杆,且所述螺杆贯穿于右侧所述立柱的左侧壁,并延伸至其右侧。
6.优选的,左侧和中间所述立柱的内侧壁之间固定连接有第一横杆,所述第一横杆的内侧壁前后侧右侧之间转动连接有第一主动轮,所述第一主动轮输出轴的外侧壁前侧固定连接有第一皮带轮,所述第一主动轮输出轴的外侧壁后侧固定连接有第二皮带轮,中间所述立柱的左侧壁下侧固定连接有第一电机,所述第一电机的输出端固定连接有第三皮带轮,所述第三皮带轮和所述第一皮带轮的外侧壁套接有第一皮带,所述第一横杆的内侧壁前后两侧之间转动连接有第一从动轮,且自左向右依次排列,所述第一主动轮和所述第一
从动轮的外侧壁套接有第一传送带。
7.优选的,所述第一传送带的外侧壁开有放置槽,且呈环形均匀排列,所述放置槽的内腔设有物料盒,所述物料盒的前侧壁左右两侧开有定位孔,所述第一传送带的右下方设有物料检测器,所述物料盒采用铁质材料制成。
8.优选的,所述第一滑块的顶部之间通过螺丝固定连接有连接块,所述连接块的内侧壁之间固定连接有x轴滑轨,所述x轴滑轨的外侧壁滑动连接有连接板,且所述z轴滑轨固定连接在所述连接板的底部。
9.优选的,所述z轴滑轨前侧壁上侧中间固定连接有第一伸缩杆,所述z轴滑轨前侧壁上侧左右两侧固定连接有稳定杆,且所述第一伸缩杆的输出端固定连接在所述滑件的顶部左侧,所述稳定杆滑动连接在所述滑件的滑孔内腔,所述滑件的前侧壁右上侧固定连接有第二伸缩杆,所述第二伸缩杆的前端固定连接有限位板,所述滑件的后侧壁下侧固定连接有第二滑块,所述第二滑块与所述螺杆啮合连接,所述第一伸缩杆和所述第二伸缩杆均为电动伸缩杆。
10.优选的,所述螺杆的右端通过联轴器固定连接有第三电机,所述第三电机的底部固定连接有支撑板,且所述支撑板滑动连接在右侧所述连接轨道的外侧壁。
11.优选的,所述第二横杆的内侧壁前后两侧左侧之间转动连接有第二主动轮,所述第二主动轮输出轴的外侧壁套接有第四皮带轮,所述第四皮带轮和第二皮带轮的外侧壁套接有第二皮带,所述第二横杆的内侧壁前后两侧右侧之间转动连接有第二传送带。
12.优选的,所述控制箱的顶部固定连接有控制面板,所述控制面板的左侧壁前侧中间固定连接有拉手,所述控制箱电性连接控制面板、第一电机、物料检测器、滑轨控制器、第一伸缩杆、第一位置传感器、第二电机、电磁控制器、第二位置传感器、第二伸缩杆和第三电机。
13.优选的,所述回收箱的顶部后侧中间开有回收入口,所述回收箱的内腔后侧壁和底部之间固定连接有斜道,所述回收箱的前侧壁下侧开有回收出口。
14.与现有技术相比,本发明的有益效果是:
15.1、该自动下料翻转平台,通过第一位置传感器检测第一传送带上的物料盒,通过第一滑块和滑件在y轴滑轨和z轴滑轨上进行滑动,第三电机带动螺杆进行转动,使连接板在x轴滑轨上进行滑动,电磁接触杆插入物料盒中的定位孔中对物料进行固定,通过第二电机带动电磁接触杆进行转动翻转,限位板对物料进行限位,并移动到第二传送带输送到下一道下料工序,电磁接触杆将空的物料盒放入回收箱中重新装填物料,无需人工操作,省时省力;
16.2、该自动下料翻转平台,通过控制箱连接电磁控制器在电磁接触杆插入到物料盒的定位孔中时启动电磁,电磁接触杆与物料盒进行吸附,限位板对物料进行限位,在放置到第二传送带上时第二伸缩杆带动限位板后缩,使物料落入第二传送带上,全程无需电磁接触杆与物料进行接触,且无需对物料盒进行夹动,避免对物料造成损伤;
17.3、该自动下料翻转平台,通过y轴滑轨和z轴滑轨以及x轴滑轨配合第一滑块和第二滑块,实现将物料从低处输送至高处,无需人力进行高处输送,避免人员受伤隐患。
附图说明
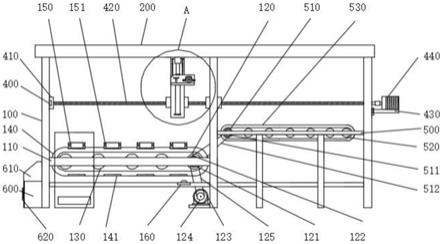
18.图1为本发明主视结构示意图;
19.图2为本发明俯视部分结构示意图;
20.图3为本发明z轴滑轨俯视结构示意图;
21.图4为本发明回收箱侧视放大结构示意图;
22.图5为本发明图1中a结构放大示意图。
23.图中:100、立柱;110、第一横杆;120、第一主动轮;121、第一皮带轮;122、第二皮带轮;123、第一电机;124、第三皮带轮;125、第一皮带;130、第一从动轮;140、第一传送带;141、放置槽;150、物料盒;151、定位孔;160、物料检测器;200、顶杆;210、y轴滑轨;211、滑轨控制器;220、第一滑块;230、连接块;240、x轴滑轨;250、连接板;300、z轴滑轨;310、第一伸缩杆;320、稳定杆;330、滑槽;340、滑件;350、第一位置传感器;360、第二电机;361、连接转盘;362、电磁控制器;363、电磁接触杆;364、第二位置传感器;370、第二伸缩杆;380、限位板;390、第二滑块;400、连接轨道;410、第三滑块;420、螺杆;430、支撑板;440、第三电机;500、第二横杆;510、第二主动轮;511、第四皮带轮;512、第二皮带;530、第二传送带;600、控制箱;610、控制面板;620、拉手;700、回收箱;710、回收入口;720、斜道;730、回收出口。
具体实施方式
24.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
25.实施例一
26.请参阅图1-5,本发明提供一种技术方案:自动下料翻转平台,包括立柱100、顶杆200、z轴滑轨300、连接轨道400、第二横杆500、控制箱600和回收箱700,顶杆200固定连接在立柱100的顶部,z轴滑轨300位于顶杆200的内侧壁之间,连接轨道400固定连接在立柱100的右侧壁上侧之间,第二横杆500固定连接在右侧和中间立柱100的内侧壁之间,控制箱600固定连接在左侧立柱100的左侧壁下侧,回收箱700位于顶杆200的左下方,顶杆200的内侧壁左右两侧之间固定连接有y轴滑轨210,y轴滑轨210的末端设有滑轨控制器211,y轴滑轨210的外侧壁滑动连接有第一滑块220,z轴滑轨300前侧壁下侧中间开有滑槽330,滑槽330的内腔滑动连接有滑件340,滑件340的前侧壁左侧固定连接有第一位置传感器350,滑件340的后侧壁右侧中间固定连接有第二电机360,且第二电机360的输出端贯穿于滑件340的后侧壁右侧并延伸至其前侧,第二电机360的输出端固定连接有连接转盘361,连接转盘361的前侧壁固定连接有电磁控制器362,电磁控制器362的前侧壁固定连接有电磁接触杆363,电磁控制器362的前侧壁中间固定连接有第二位置传感器364,左侧连接轨道400的外侧壁滑动连接有第三滑块410,第三滑块410右端转动连接有螺杆420,且螺杆420贯穿于右侧立柱100的左侧壁,并延伸至其右侧,左侧和中间立柱100的内侧壁之间固定连接有第一横杆110,第一横杆110的内侧壁前后侧右侧之间转动连接有第一主动轮120,第一主动轮120输出轴的外侧壁前侧固定连接有第一皮带轮121,第一主动轮120输出轴的外侧壁后侧固定连接有第二皮带轮122,中间立柱100的左侧壁下侧固定连接有第一电机123,第一电机123的
输出端固定连接有第三皮带轮124,第三皮带轮124和第一皮带轮121的外侧壁套接有第一皮带125,第一横杆110的内侧壁前后两侧之间转动连接有第一从动轮130,且自左向右依次排列,第一主动轮120和第一从动轮130的外侧壁套接有第一传送带140,第一传送带140的外侧壁开有放置槽141,且呈环形均匀排列,放置槽141的内腔设有物料盒150,物料盒150的前侧壁左右两侧开有定位孔151,第一传送带140的右下方设有物料检测器160,物料盒150采用铁质材料制成,第一滑块220的顶部之间通过螺丝固定连接有连接块230,连接块230的内侧壁之间固定连接有x轴滑轨240,x轴滑轨240的外侧壁滑动连接有连接板250,且z轴滑轨300固定连接在连接板250的底部,z轴滑轨300前侧壁上侧中间固定连接有第一伸缩杆310,z轴滑轨300前侧壁上侧左右两侧固定连接有稳定杆320,且第一伸缩杆310的输出端固定连接在滑件340的顶部左侧,稳定杆320滑动连接在滑件340的滑孔内腔,滑件340的前侧壁右上侧固定连接有第二伸缩杆370,第二伸缩杆370的前端固定连接有限位板380,滑件340的后侧壁下侧固定连接有第二滑块390,第二滑块390与螺杆420啮合连接,第一伸缩杆310和第二伸缩杆370均为电动伸缩杆,螺杆420的右端通过联轴器固定连接有第三电机440,第三电机440的底部固定连接有支撑板430,且支撑板430滑动连接在右侧连接轨道400的外侧壁,第二横杆500的内侧壁前后两侧左侧之间转动连接有第二主动轮510,第二主动轮510输出轴的外侧壁套接有第四皮带轮511,第四皮带轮511和第二皮带轮122的外侧壁套接有第二皮带512,第二横杆500的内侧壁前后两侧右侧之间转动连接有第二传送带530,回收箱700的顶部后侧中间开有回收入口710,回收箱700的内腔后侧壁和底部之间固定连接有斜道720,回收箱700的前侧壁下侧开有回收出口730,在使用时,将物料放置于物料盒150中,放置在第一传送带140的放置槽141中,第一位置传感器350检测物料位置,通过第一滑块220在y轴滑轨210上进行纵向滑动,通过第三电机440带动螺杆420进行转动,第二滑块390带动z轴滑轨300和连接板250在x轴滑轨240上进行横向滑动,通过第一伸缩杆310带动滑件340进行垂直伸缩,将电磁接触杆363插入物料盒150中的定位孔151中对物料进行固定,通过第二电机360带动电磁接触杆363进行转动翻转,限位板380对物料进行限位,并移动到第二传送带530上并输送到下一道下料工序,电磁接触杆363将空的物料盒150放入回收箱700中重新装填物料,无需人工操作,省时省力。
27.实施例二
28.请参阅图1-4,本发明提供一种技术方案:自动下料翻转平台,包括立柱100、顶杆200、z轴滑轨300、连接轨道400、第二横杆500、控制箱600和回收箱700,顶杆200固定连接在立柱100的顶部,z轴滑轨300位于顶杆200的内侧壁之间,连接轨道400固定连接在立柱100的右侧壁上侧之间,第二横杆500固定连接在右侧和中间立柱100的内侧壁之间,控制箱600固定连接在左侧立柱100的左侧壁下侧,回收箱700位于顶杆200的左下方,顶杆200的内侧壁左右两侧之间固定连接有y轴滑轨210,y轴滑轨210的末端设有滑轨控制器211,y轴滑轨210的外侧壁滑动连接有第一滑块220,z轴滑轨300前侧壁下侧中间开有滑槽330,滑槽330的内腔滑动连接有滑件340,滑件340的前侧壁左侧固定连接有第一位置传感器350,滑件340的后侧壁右侧中间固定连接有第二电机360,且第二电机360的输出端贯穿于滑件340的后侧壁右侧并延伸至其前侧,第二电机360的输出端固定连接有连接转盘361,连接转盘361的前侧壁固定连接有电磁控制器362,电磁控制器362的前侧壁固定连接有电磁接触杆363,电磁控制器362的前侧壁中间固定连接有第二位置传感器364,左侧连接轨道400的外侧壁
滑动连接有第三滑块410,第三滑块410右端转动连接有螺杆420,且螺杆420贯穿于右侧立柱100的左侧壁,并延伸至其右侧,z轴滑轨300前侧壁上侧中间固定连接有第一伸缩杆310,z轴滑轨300前侧壁上侧左右两侧固定连接有稳定杆320,且第一伸缩杆310的输出端固定连接在滑件340的顶部左侧,稳定杆320滑动连接在滑件340的滑孔内腔,滑件340的前侧壁右上侧固定连接有第二伸缩杆370,第二伸缩杆370的前端固定连接有限位板380,滑件340的后侧壁下侧固定连接有第二滑块390,第二滑块390与螺杆420啮合连接,第一伸缩杆310和第二伸缩杆370均为电动伸缩杆,控制箱600的顶部固定连接有控制面板610,控制面板610的左侧壁前侧中间固定连接有拉手620,控制箱600电性连接控制面板610、第一电机123、物料检测器160、滑轨控制器211、第一伸缩杆310、第一位置传感器350、第二电机360、电磁控制器362、第二位置传感器364、第二伸缩杆370和第三电机440,在使用时通过控制箱600连接电磁控制器362在电磁接触杆363插入到物料盒150的定位孔151中时启动电磁,电磁接触杆363与物料盒150进行吸附,限位板380对物料进行限位,在放置到第二传送带530上时第二伸缩杆370带动限位板380后缩,使物料落入第二传送带530上,全程无需电磁接触杆363与物料进行接触,且无需对物料盒150进行夹动,避免对物料造成损伤。
29.实施例三
30.请参阅图1-4,本发明提供一种技术方案:自动下料翻转平台,包括立柱100、顶杆200、z轴滑轨300、连接轨道400、第二横杆500、控制箱600和回收箱700,顶杆200固定连接在立柱100的顶部,z轴滑轨300位于顶杆200的内侧壁之间,连接轨道400固定连接在立柱100的右侧壁上侧之间,第二横杆500固定连接在右侧和中间立柱100的内侧壁之间,控制箱600固定连接在左侧立柱100的左侧壁下侧,回收箱700位于顶杆200的左下方,顶杆200的内侧壁左右两侧之间固定连接有y轴滑轨210,y轴滑轨210的末端设有滑轨控制器211,y轴滑轨210的外侧壁滑动连接有第一滑块220,z轴滑轨300前侧壁下侧中间开有滑槽330,滑槽330的内腔滑动连接有滑件340,滑件340的前侧壁左侧固定连接有第一位置传感器350,滑件340的后侧壁右侧中间固定连接有第二电机360,且第二电机360的输出端贯穿于滑件340的后侧壁右侧并延伸至其前侧,第二电机360的输出端固定连接有连接转盘361,连接转盘361的前侧壁固定连接有电磁控制器362,电磁控制器362的前侧壁固定连接有电磁接触杆363,电磁控制器362的前侧壁中间固定连接有第二位置传感器364,左侧连接轨道400的外侧壁滑动连接有第三滑块410,第三滑块410右端转动连接有螺杆420,且螺杆420贯穿于右侧立柱100的左侧壁,并延伸至其右侧,第一滑块220的顶部之间通过螺丝固定连接有连接块230,连接块230的内侧壁之间固定连接有x轴滑轨240,x轴滑轨240的外侧壁滑动连接有连接板250,且z轴滑轨300固定连接在连接板250的底部,z轴滑轨300前侧壁上侧中间固定连接有第一伸缩杆310,z轴滑轨300前侧壁上侧左右两侧固定连接有稳定杆320,且第一伸缩杆310的输出端固定连接在滑件340的顶部左侧,稳定杆320滑动连接在滑件340的滑孔内腔,滑件340的前侧壁右上侧固定连接有第二伸缩杆370,第二伸缩杆370的前端固定连接有限位板380,滑件340的后侧壁下侧固定连接有第二滑块390,第二滑块390与螺杆420啮合连接,第一伸缩杆310和第二伸缩杆370均为电动伸缩杆,螺杆420的右端通过联轴器固定连接有第三电机440,第三电机440的底部固定连接有支撑板430,且支撑板430滑动连接在右侧连接轨道400的外侧壁,第二横杆500的内侧壁前后两侧左侧之间转动连接有第二主动轮510,第二主动轮510输出轴的外侧壁套接有第四皮带轮511,第四皮带轮511和第二皮带轮
122的外侧壁套接有第二皮带512,第二横杆500的内侧壁前后两侧右侧之间转动连接有第二传送带530,在使用时,第一位置传感器350检测物料位置,通过第一滑块220在y轴滑轨210上进行纵向滑动,通过第三电机440带动螺杆420进行转动,第二滑块390带动z轴滑轨300和连接板250在x轴滑轨240上进行横向滑动,通过第一伸缩杆310带动滑件340进行垂直伸缩,电磁接触杆363将物料盒150进行翻转并将物料从低处的第一传送带140输送至高处的第二传送带530上,实现将物料从低处输送至高处,无需人力进行高处输送,避免人员受伤隐患。
31.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
32.虽然在上文中已经参考实施例对本发明进行了描述,然而在不脱离本发明的范围的情况下,可以对其进行各种改进并且可以用等效物替换其中的部件。尤其是,只要不存在结构冲突,本发明所披露的实施例中的各项特征均可通过任意方式相互结合起来使用,在本说明书中未对这些组合的情况进行穷举性的描述仅仅是出于省略篇幅和节约资源的考虑。因此,本发明并不局限于文中公开的特定实施例,而是包括落入权利要求的范围内的所有技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1