吸附式仓储物流用智能吊装系统的制作方法
1.本发明涉及吊装技术领域,尤其涉及吸附式仓储物流用智能吊装系统。
背景技术:
2.物流,是指为了满足客户的需求,以最低的成本,通过运输、保管、配送等方式,实现原材料、半成品、成品等由商品的产地到消费地的计划、实施和管理的过程。随着技术的发展,大多吊装搬运工作由吊具完成。
3.目前,仓储物流的吊装抓具在搬运过程中,存在以下问题:
4.1、只能适应单一货物的抓取,对于不同体型的货物,需更换其他类型的抓具,难以实现多种规格形状的货物共用一个抓具的功能;
5.2、对货物进行吊装时,如果发生夹持不稳的现象,货物会发生左右晃动的现象,导致货物有可能发生碰撞和掉落的危险,进而会使货物损坏。
技术实现要素:
6.本发明的目的是为了解决现有技术中存在的现在有吊装抓手夹持比较单一且稳定性差缺点,而提出的吸附式仓储物流用智能吊装系统。
7.为了解决现有技术存在的现在有吊装抓手夹持比较单一且稳定性差的问题,本发明采用了如下技术方案:
8.吸附式仓储物流用智能吊装系统,包括底板、螺旋机构、吸盘机构、驱动机构、夹持机构,所述底板为水平横向放置的矩形板状,所述底板内中部横向凹陷有矩形槽,所述矩形槽内安装有螺旋机构,位于矩形槽两侧在底板的底面设有一对竖向固接的侧板,位于一对侧板之间设有横向放置的升降板,所述升降板的底面安装有吸盘机构;所述底板的底面两侧设有一对滑动连接的u形板,每块所述u形板内均安装有驱动机构,每块所述u形板的底面安装有夹持机构。
9.优选地,所述螺旋机构包括螺旋电机、螺纹长杆、双层铰接板、单层铰接板,所述矩形槽内一侧安装有固定轴承,所述矩形槽内另一侧安装有螺旋电机,所述螺旋电机的电机轴端部设有同轴联接的螺纹长杆,且所述螺纹长杆两段上的螺纹牙呈反向对称螺旋,所述螺纹长杆的外端插设在固定轴承内,所述螺旋长杆两段上套设有一对螺旋连接的螺纹筒;所述底板的顶面中部横向开设有一对贯穿矩形槽的限位滑孔,每个所述螺纹筒的两侧均设有一对竖向固接的限位滑块,每块所述限位滑块均滑动贯穿对应的限位滑孔并伸出至底板的底面外侧,其中,一对所述限位滑块的底端之间设有活动铰接的双层铰接板,另一对所述限位滑块的底端之间设有活动铰接的单层铰接板,且所述单层铰接板配合卡合在双层铰接板的中间。
10.优选地,所述升降板的顶面中部设有u形铰接座,所述双层铰接板的底端与u形铰接座内两侧活动铰接,所述单层铰接板的底端与u形铰接座内中部活动铰接;所述升降板的两端设有一对固接对称的w形滑块,每块所述侧板的里侧面均设有竖向固接的u形滑轨,且
每块所述w形滑块均滑动卡合在对应的u形滑轨上。
11.优选地,所述吸盘机构包括固定板、连接长杆、固定长杆、吸盘,所述升降板的底面中部设有倒锥形状的四角抓板,所述四角抓板的底面设有固定板,所述固定板的外侧面设有四根呈平行四边形状的连接长杆,且四根连接长杆的拐角处均设有h形耳座,每座所述h形耳座的两个开口内均分别对应的连接长杆的端部活动铰接;所述固定板的两侧设有一对输出端朝外的微型伸缩缸,且每个所述微型伸缩缸的伸缩杆端部均与对应的h形耳座固接,每根所述连接长杆的中部均开设有固定通孔,所述固定板的四侧面中部均设有活动铰接的固定长杆,且每根所述固定长杆均贯穿对应的固定通孔并伸出至外侧,每根固定长杆的底面外端、每座h形耳座的底面均设有竖向固接的吸盘弹簧,每根所述吸盘弹簧的底端均安装有吸盘。
12.优选地,所述底板的底面两侧均凹陷有定位卡槽,每块所述u形板的顶面上均设有定位凸块,且所述定位凸块均滑动卡合在对应的定位卡槽内,所述底板的两端面均凹陷有电推缸槽,每个所述电推缸槽内均安装有输出端朝外的电推缸,每个所述电推缸的电推杆端部均设有l形推块,且每块所述l形推块的底端均与对应的u形板的外侧面中部固接。
13.优选地,所述夹持机构包括斜杆、纵杆、双轴伸缩缸、梯形夹持块,所述u形板的底面两端设有双耳座,每座所述双耳座均与斜向放置的斜杆的顶端活动铰接,每根所述斜杆的底端均设有斜杆挡块,两根所述斜杆之间设有纵向放置的纵杆,所述纵杆的两端均设有纵杆挡块,所述纵杆的中部设有贯穿固接的丝杠筒,且所述丝杠筒螺旋套设在驱动机构内的丝杠中部,所述纵杆通过一对滑动块分别与对应的斜杆连接;每块所述滑动块的里侧面均设有固定筒,每个所述固定筒内均设有双轴伸缩缸,每个所述双轴伸缩缸的两根伸缩杆端部均设有l形连块,每块所述l形连块均与对应的梯形夹持块固接。
14.优选地,所述滑动块的侧面前端纵向开设有第一滑孔,所述纵杆滑动贯穿对应的第一滑孔,所述滑动块的顶面后端斜向开设有第二滑孔,所述斜杆滑动贯穿对应的第二滑孔。
15.优选地,所述底板的顶面四个拐角均设有t形座,每座所述t形座的顶端均设有吊环,每个所述吊环上均缠绕有天车钢丝绳。
16.与现有技术相比,本发明的有益效果是:
17.1、本发明通过吸盘机构的配合使用,微型伸缩缸的伸缩杆通过h形耳座带动连接长杆改变其平行的形状,进而带动固定长杆沿着对应的固定通孔进行滑动,改变固定长杆的开合角度,可依据方便根据货物顶面面积大小,使多个吸盘的均匀分布在货物上实现有效贴合吸附;
18.2、本发明通过夹持机构的配合使用,根据货物侧面的高度距离,电推缸的电推杆通过l形推块带动u形板移动,带动定位凸块沿着对应的定位卡槽向内滑动,方便带动丝杠及斜杆向着货物的两侧靠拢;双轴伸缩缸的两根伸缩杆带动两块梯形夹持块夹持在货物的上下拐角处,方便了梯形夹持块分别夹持在货物所有拐角处,实现准确抓取。
19.综上,本发明通过各机构的配合使用,能控制夹取角度,可根据货物体型不同改变夹持间距,其优点有动作灵活、机构动力性好、物件抓取准确、精度高,通过对货物拐角配合顶面吸附的夹持作用,进一步增加了夹持货物的稳定性。
附图说明
20.此处所说明的附图用来提供对本发明的进一步理解,构成本技术的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
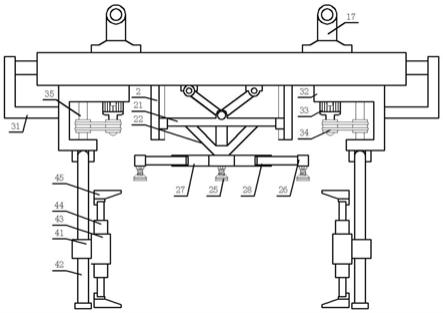
21.图1为本发明的主视剖面图;
22.图2为本发明的主视图;
23.图3为本发明的螺旋机构仰视剖面图;
24.图4为本发明的吸盘机构俯视图;
25.图5为本发明的驱动机构左视图;
26.图6为本发明的驱动机构剖面图;
27.图7为本发明的滑动块三维图;
28.图中序号:底板1、螺旋电机11、螺纹长杆12、螺纹筒13、限位滑块14、双层铰接板15、单层铰接板16、t形座17、侧板2、升降板21、四角抓板22、固定板23、微型伸缩缸24、吸盘25、h形耳座26、连接长杆27、固定长杆28、电推缸3、l形推块31、u形板32、驱动电机33、驱动皮带34、联动轴35、丝杠36、丝杠筒37、纵杆4、滑动块41、斜杆42、固定筒43、双轴伸缩缸44、梯形夹持块45。
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
30.实施例一:为解决现在有吊装抓手夹持比较单一且稳定性差的问题,本实施例提供了吸附式仓储物流用智能吊装系统,参见图1-7,具体的,包括底板1、螺旋机构、吸盘机构、驱动机构、夹持机构,所述底板1为水平横向放置的矩形板状,所述底板1内中部横向凹陷有矩形槽,所述矩形槽内安装有螺旋机构,位于矩形槽两侧在底板1的底面设有一对竖向固接的侧板2,位于一对侧板2之间设有横向放置的升降板21,所述升降板21的底面安装有吸盘机构;所述底板1的底面两侧设有一对滑动连接的u形板32,每块所述u形板32内均安装有驱动机构,每块所述u形板32的底面安装有夹持机构,所述底板1的顶面四个拐角均设有t形座17,每座所述t形座17的顶端均设有吊环,每个所述吊环上均缠绕有天车钢丝绳。
31.在本发明中,所述螺旋机构包括螺旋电机11、螺纹长杆12、双层铰接板15、单层铰接板16,所述矩形槽内一侧安装有固定轴承,所述矩形槽内另一侧安装有螺旋电机11,螺旋电机11的型号为yx3-112m-4,所述螺旋电机11的电机轴端部设有同轴联接的螺纹长杆12,且所述螺纹长杆12两段上的螺纹牙呈反向对称螺旋,所述螺纹长杆12的外端插设在固定轴承内,所述螺旋长杆12两段上套设有一对螺旋连接的螺纹筒13;所述底板1的顶面中部横向开设有一对贯穿矩形槽的限位滑孔,每个所述螺纹筒13的两侧均设有一对竖向固接的限位滑块14,每块所述限位滑块14均滑动贯穿对应的限位滑孔并伸出至底板1的底面外侧,其中,一对所述限位滑块14的底端之间设有活动铰接的双层铰接板15,另一对所述限位滑块14的底端之间设有活动铰接的单层铰接板16,且所述单层铰接板16配合卡合在双层铰接板15的中间;所述升降板21的顶面中部设有u形铰接座,所述双层铰接板15的底端与u形铰接座内两侧活动铰接,所述单层铰接板16的底端与u形铰接座内中部活动铰接;所述升降板21的两端设有一对固接对称的w形滑块,每块所述侧板2的里侧面均设有竖向固接的u形滑轨,
且每块所述w形滑块均滑动卡合在对应的u形滑轨上;通过螺旋机构的配合使用,控制螺旋电机11的电机轴转动,带动螺纹长杆12配合一对螺纹筒13进行螺旋转动,带动两个螺纹筒13同向向内横向移动,进而带动限位滑块14沿着限位滑孔向内滑动,在铰接作用的配合下,带动单层铰接板16配合卡合在双层铰接板15的中间,进而带动w形滑块沿着对应的u形滑轨向下滑动,通过u形铰接座方便了带动升降板21进行升降,从而使得吸盘25吸附在货物的顶面上。
32.在本发明中,所述吸盘机构包括固定板23、连接长杆27、固定长杆28、吸盘25,所述升降板21的底面中部设有倒锥形状的四角抓板22,所述四角抓板22的底面设有固定板23,所述固定板23的外侧面设有四根呈平行四边形状的连接长杆27,且四根连接长杆27的拐角处均设有h形耳座26,每座所述h形耳座26的两个开口内均分别对应的连接长杆27的端部活动铰接;所述固定板23的两侧设有一对输出端朝外的微型伸缩缸24,微型伸缩缸24的型号为hr6000,且每个所述微型伸缩缸24的伸缩杆端部均与对应的h形耳座26固接,每根所述连接长杆27的中部均开设有固定通孔,所述固定板23的四侧面中部均设有活动铰接的固定长杆28,且每根所述固定长杆28均贯穿对应的固定通孔并伸出至外侧,每根固定长杆28的底面外端、每座h形耳座26的底面均设有竖向固接的吸盘弹簧,每根所述吸盘弹簧的底端均安装有吸盘25;通过吸盘机构的配合使用,控制微型伸缩缸24的伸缩杆伸缩,通过h形耳座26带动连接长杆27改变其平行的形状,进而带动固定长杆28沿着对应的固定通孔进行滑动,改变固定长杆28的开合角度,方便了根据货物顶面面积的大小,使得多个吸盘25的位置均匀分布在货物顶面上。
33.在本发明中,所述底板1的底面两侧均凹陷有定位卡槽,每块所述u形板32的顶面上均设有定位凸块,且所述定位凸块均滑动卡合在对应的定位卡槽内,所述底板1的两端面均凹陷有电推缸槽,每个所述电推缸槽内均安装有输出端朝外的电推缸3,电推缸3的型号为la150,每个所述电推缸3的电推杆端部均设有l形推块31,且每块所述l形推块31的底端均与对应的u形板32的外侧面中部固接;控制电推缸3的电推杆缩短,通过l形推块31带动u形板32向内移动,带动定位凸块沿着对应的定位卡槽向内滑动,方便了带动丝杠36及斜杆42向着货物的两侧靠拢。
34.在本发明中,所述夹持机构包括斜杆42、纵杆4、双轴伸缩缸44、梯形夹持块45,所述u形板32的底面两端设有双耳座,每座所述双耳座均与斜向放置的斜杆42的顶端活动铰接,每根所述斜杆42的底端均设有斜杆挡块,两根所述斜杆42之间设有纵向放置的纵杆4,所述纵杆4的两端均设有纵杆挡块,所述纵杆4的中部设有贯穿固接的丝杠筒37,且所述丝杠筒37螺旋套设在驱动机构内的丝杠36中部,所述纵杆4通过一对滑动块41分别与对应的斜杆42连接,所述滑动块41的侧面前端纵向开设有第一滑孔,所述纵杆4滑动贯穿对应的第一滑孔,所述滑动块41的顶面后端斜向开设有第二滑孔,所述斜杆42滑动贯穿对应的第二滑孔;每块所述滑动块41的里侧面均设有固定筒43,每个所述固定筒43内均设有双轴伸缩缸44,双轴伸缩缸44可采用现有常用的双向伸缩缸或型号为cpmt1-2m型,每个所述双轴伸缩缸44的两根伸缩杆端部均设有l形连块,每块所述l形连块均与对应的梯形夹持块45固接;通过夹持机构的配合使用,根据货物侧面的高度距离,控制双轴伸缩缸44的两根伸缩杆缩短,进而带动两块梯形夹持块45夹持在货物的上下拐角处,待梯形夹持块45分别夹持在货物所有拐角处。
35.实施例二:在实施例一中,还存在不能根据货物侧面的宽度距离改变夹持方向的问题,因此,在实施例一的基础上本实施例还包括:
36.在本发明中,所述驱动机构包括联动轴35、丝杠36、驱动电机33、驱动皮带34,所述u形板32内上下两端均凹陷有定位轴承,两个所述定位轴承之间设有竖向放置的联动轴35,且所述联动轴35的两端分别贯穿插设在对应的定位轴承内,所述联动轴35的底端贯穿u形板32的底面并与竖向固接的丝杠36同轴联接,所述丝杠36的底端设有丝杠挡块;所述u形板32内顶面里侧凹陷有电机槽,所述电机槽内安装有驱动电机33,驱动电机33的型号为tybz-300-100l-4,所述驱动电机33的电机轴端部套设有同轴联接的主动皮带轮,所述联动轴35的中部套设有从动皮带轮,所述驱动皮带34的两端分别套设在主动皮带轮、从动皮带轮上;
37.通过驱动机构的配合使用,控制驱动电机33的电机轴转动,驱动电机33的电机轴带动主动皮带轮同步转动,通过驱动皮带带动从动皮带轮及联动轴35同步转动,进而带动丝杠36配合丝杠筒37螺旋转动,通过丝杠筒37带动纵杆4升降,带动纵杆4沿着滑动块41上的第一滑孔滑动,在铰接作用的配合下,带动斜杆42沿着滑动块41上的第二滑孔滑动,改变两根斜杆42的开合角度及两块滑动块41之间的间距,方便了根据货物侧面的宽度距离改变两块滑动块41之间的间距。
38.实施例三:在本实施例中,本发明还提出了吸附式仓储物流用智能吊装系统的抓取方法,包括以下步骤:
39.步骤一,吊环通过天车钢丝绳与天车连接,依次把螺旋电机11、微型伸缩缸24、电推缸、驱动电机33、双轴伸缩缸44分别通过电源线与外接电源电性连接,并把吸盘25通过气管与外接控制气源连通,并通过天车控制天车钢丝绳带动底板1移动至待搬运的货物上方;
40.步骤二,根据货物顶面面积的大小,控制微型伸缩缸24的伸缩杆伸缩,在铰接作用的配合下,通过h形耳座26带动连接长杆27改变其平行的形状,进而带动固定长杆28沿着对应的固定通孔进行滑动,改变固定长杆28的开合角度,使得多个吸盘25的位置均匀分布在货物顶面上;
41.步骤三,控制螺旋电机11的电机轴转动,带动螺纹长杆12配合一对螺纹筒13进行螺旋转动,由于螺纹长杆12两段上的螺纹牙呈反向对称螺旋,带动两个螺纹筒13同向向内横向移动,进而带动限位滑块14沿着限位滑孔向内滑动,在铰接作用的配合下,带动单层铰接板16配合卡合在双层铰接板15的中间,通过u形铰接座带动升降板21缓慢下降,进而带动w形滑块沿着对应的u形滑轨向下滑动,待吸盘25分别接触货物顶面,然后控制吸盘25吸气并吸附在货物的顶面上;
42.步骤四,根据货物侧面的宽度距离,控制驱动电机33的电机轴转动,驱动电机33的电机轴带动主动皮带轮同步转动,通过驱动皮带带动从动皮带轮及联动轴35同步转动,进而带动丝杠36配合丝杠筒37螺旋转动,通过丝杠筒37带动纵杆4升降,带动纵杆4沿着滑动块41上的第一滑孔滑动,在铰接作用的配合下,带动斜杆42沿着滑动块41上的第二滑孔滑动,改变两根斜杆42的开合角度及两块滑动块41之间的间距;
43.步骤五,控制电推缸3的电推杆缩短,通过l形推块31带动u形板32向内移动,带动定位凸块沿着对应的定位卡槽向内滑动,使得丝杠36及斜杆42向着货物的两侧靠拢;根据货物侧面的高度距离,控制双轴伸缩缸44的两根伸缩杆缩短,进而带动两块梯形夹持块45夹持在货物的上下拐角处,待梯形夹持块45分别夹持在货物所有拐角处,通过天车控制天
车钢丝绳带动货物进行搬运工作。
44.本发明通过各机构的配合使用,解决了现在有吊装抓手夹持比较单一且稳定性差的问题,且结构简单紧凑,能控制夹取角度,同时根据货物体型不同改变夹持的间距,其优点有动作灵活、机构动力性好、物件抓取准确、精度高,通过对货物拐角配合顶面吸附的夹持作用,进一步增加了夹持货物的稳定性。
45.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1