一种自动打包智能垃圾桶的制作方法
1.本发明涉及智能家居的技术领域,更具体地说,是涉及一种自动打包智能垃圾桶。
背景技术:
2.垃圾桶,别名垃圾箱、废料箱、废物箱;是指专门收集暂存废物、废料及垃圾的容器。一般是塑胶或金属容器制成,使用时内部放置塑料袋或垃圾袋,当垃圾收集到一定量或时间时,把垃圾袋束紧或扎紧后集中转移到垃圾收集中心或垃圾中转站。传统垃圾桶一般有敞口式和带盖型两种,收集的垃圾使人在处理转移垃圾袋时直面垃圾的异味和画面,还要在垃圾桶内重新加装收纳的新垃圾袋,而且导致一些垃圾中转转臭气熏天,使垃圾收集和存储工作带来极大不利。
3.随着人类经济社会发展,工作生活中对清洁垃圾收集的强烈需求下,部分企业及个人研发了一些具有自动打包封口的垃圾桶,通常为一或二根杆把垃圾袋挤压到一边或一个角,通过发热丝直接熔断垃圾袋的简易封口方式,该类方式都导致垃圾袋使用不均匀,垃圾袋浪费严重,压到一边的无法封薄袋而压到一角的只能封薄袋,而且封口强度没有保障,垃圾袋容易出现封不住或封不牢等现象。
技术实现要素:
4.本发明的目的在于克服现有技术中的上述缺陷,提供一种自动打包智能垃圾桶。
5.为实现上述目的,本发明提供了一种自动打包智能垃圾桶,包括桶体、中盖、用于储存和装挂垃圾袋的垃圾袋盒、用于收拢垃圾袋袋口以实现垃圾袋收口的垃圾袋收口装置、用于对垃圾袋进行封口并将垃圾袋切断的移动式热塑封切断装置和抽气投袋装置,所述中盖安装在桶体的顶部开口处,所述垃圾袋盒安装在中盖上且位于中盖的中心孔入口处,所述垃圾袋收口装置安装在中盖的下端且位于桶体与中盖之间,所述垃圾袋收口装置能够在前后夹压垃圾袋袋口的同时向内折叠垃圾袋袋口的左右侧,从而将垃圾袋的袋口折平以实现垃圾袋收口,所述移动式热塑封切断装置安装在垃圾袋收口装置的其中一个夹压部位,所述移动式热塑封切断装置的热塑封切断部位能够沿着垃圾袋的收口部位平移,从而对垃圾袋的收口部位进行热塑封和切断,所述抽气投袋装置安装在桶体的桶壁上,所述抽气投袋装置能够抽出垃圾袋与桶体之间的空气使桶体内形成负压以实现垃圾袋自动抽取投袋;
6.所述垃圾袋收口装置包括第一压杆、第二压杆、压杆平移驱动装置、第一折叠杆组和第二折叠杆组,所述第一压杆和第二压杆相互平行且间隔布置,所述第一折叠杆组铰接于第一压杆的一端与第二压杆的一端之间,所述第二折叠杆组铰接于第一压杆的另一端与第二压杆的另一端之间,所述第一压杆和第二压杆均与压杆平移驱动装置传动连接,所述压杆平移驱动装置能够同时带动第一压杆和第二压杆向中间平移,从而使第一压杆和第二压杆相互接近,所述第一折叠杆组、第二折叠杆组能够在第一压杆和第二压杆相接近时向内折叠。
7.作为优选的实施方式,所述第一折叠杆组包括第一折叠杆和第二折叠杆,所述第一折叠杆的一端铰接于第一压杆的一端,所述第二折叠杆的一端铰接于第二压杆的一端,所述第一折叠杆的另一端与第二折叠杆的另一端相铰接,所述第二折叠杆组包括第三折叠杆和第四折叠杆,所述第三折叠杆的一端铰接于第一压杆的另一端,所述第四折叠杆的一端铰接于第二压杆的另一端,所述第三折叠杆的另一端与第四折叠杆的另一端相铰接。
8.作为优选的实施方式,所述压杆平移驱动装置包括压杆平移驱动马达、第一皮带轮、第二皮带轮、第三皮带轮、第四皮带轮、第一皮带、第二皮带和第三皮带,所述压杆平移驱动马达位于第一压杆的一端,所述第一皮带轮安装在压杆平移驱动马达的输出轴上,所述第二皮带轮位于第二压杆的一端,所述第一皮带轮通过第一皮带与第二皮带轮同步连接,所述第一皮带垂直于第一压杆和第二压杆,所述第三皮带轮位于第二压杆的另一端,所述第四皮带轮位于第一压杆的另一端,所述第二皮带轮通过第二皮带与第三皮带轮同步连接,所述第二皮带平行于第一压杆和第二压杆,所述第四皮带轮通过第三皮带与第三皮带轮同步连接,所述第三皮带垂直于第一压杆和第二压杆,所述第一压杆的一端与第一皮带的其中一段带体固定连接,所述第一压杆的另一端与第三皮带的其中一段带体固定连接,所述第二压杆的一端与第一皮带的另一段带体固定连接,所述第二压杆的另一端与第三皮带的另一段带体固定连接。
9.作为优选的实施方式,所述移动式热塑封切断装置包括平移块、平移块平移驱动装置、切刀和两个发热丝,所述平移块平移驱动装置安装在垃圾袋收口装置的其中一个夹压部位上,所述平移块平移驱动装置与平移块传动连接以带动其沿着垃圾袋的收口部位平移,所述发热丝和切刀均安装在平移块面向垃圾袋收口装置的另一夹压部位的一侧,所述发热丝相互平行且上下间隔布置,所述切刀位于两个发热丝之间。
10.作为优选的实施方式,所述平移块平移驱动装置包括平移块平移驱动马达、第四皮带、第五皮带轮和第六皮带轮,所述平移块平移驱动马达安装在垃圾袋收口装置的其中一个夹压部位的一端,所述第六皮带轮可转动地安装在所述垃圾袋收口装置的其中一个夹压部位的另一端,所述第五皮带轮安装在平移块平移驱动马达的输出轴上并通过第四皮带与第六皮带轮同步连接,所述平移块与第四皮带固定连接。
11.作为优选的实施方式,所述垃圾袋盒包括环形的盒盖和环形的盒体,所述盒体的顶部凹设有用于储存垃圾袋的环形槽,所述盒盖安装在盒体的顶部并盖设于环形槽的上方,所述盒盖的内侧与盒体的内壁上边沿之间设有供垃圾袋伸出的开口。
12.作为优选的实施方式,还包括电路板、顶盖、后盖和顶盖开关驱动装置,所述电路板安装在桶体的背部设有的电池盒中,所述顶盖位于中盖的顶部开口处,所述顶盖开关驱动装置包括顶盖开关马达和传动组件,所述顶盖开关马达安装在桶体的背部并通过传动组件与顶盖的一端传动连接,所述顶盖开关驱动装置能够带动顶盖相对于中盖上下翻转,从而打开或关闭中盖,所述后盖安装在桶体的背部,所述顶盖开关驱动装置、垃圾袋收口装置、移动式热塑封切断装置和抽气投袋装置分别与电路板电连接。
13.作为优选的实施方式,还包括用于检测垃圾袋是否满载的满载传感器和用于检测顶盖的开关的顶盖开关检测传感器,所述满载传感器安装在桶体的内壁上,所述顶盖开关检测传感器安装在中盖的顶部,所述顶盖开关检测传感器和满载传感器分别与电路板电连接。
14.作为优选的实施方式,所述抽气投袋装置包括抽气马达和风扇叶轮,所述抽气马达安装在桶体的桶壁上,所述风扇叶轮安装在抽气马达上并由抽气马达驱动旋转。
15.与现有技术相比,本发明的有益效果在于:
16.1、本发明的结构简单、新颖,设计合理,设置有用于储存和装挂垃圾袋的垃圾袋盒、用于收拢垃圾袋袋口以实现垃圾袋收口的垃圾袋收口装置、用于对垃圾袋进行封口并将垃圾袋切断的移动式热塑封切断装置和用于抽出垃圾袋与桶体之间的空气使桶体内形成负压以实现垃圾袋自动抽取投袋的抽气投袋装置,各个装置动作协调,替代了人手打包垃圾袋,实现了垃圾桶的全自动打包垃圾袋作业,为人们带来便利。
17.2、本发明的压杆平移驱动装置能够同时带动两条压杆向中间平移靠拢和带动两组折叠杆向内折叠,从而使垃圾袋袋口在折叠杆的左右向内折叠和压杆的前后对齐压紧作用下形成一个均匀平整的打包收口面,实现垃圾袋的匀称收口,垃圾袋的四周用量均匀,挤压收口面平整,相比于传统的单边移动式压紧收口方式和单角聚拢压紧收口方式具有更好的收口效果,可保证后续垃圾袋的密封稳定性,可适用于各种不同厚度的垃圾袋,受力平稳,速度快。
18.3、本发明的移动式热塑封切断装置采用热塑封封口和切刀切断,相比于传统的智能垃圾桶的热熔断切断封口方式具有更好的封口效果,封口强度高,封口牢固,能够适应各类垃圾袋的可靠封口。
附图说明
19.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
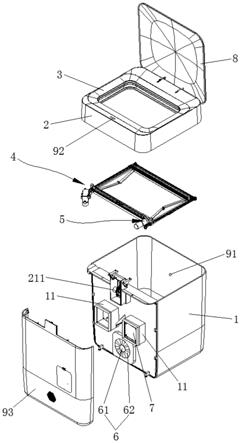
20.图1是本发明实施例提供的一种自动打包智能垃圾桶的分解图;
21.图2是本发明实施例提供的一种自动打包智能垃圾桶的剖视图;
22.图3是本发明实施例提供的一种自动打包智能垃圾桶的垃圾袋盒的俯视图;
23.图4是图3中a截面的剖视图;
24.图5是本发明实施例提供的一种自动打包智能垃圾桶的垃圾袋的折合示意图;
25.图6是本发明实施例提供的一种自动打包智能垃圾桶的垃圾袋筒料的结构示意图;
26.图7是本发明实施例提供的一种自动打包智能垃圾桶的垃圾袋收口装置和移动式热塑封切断装置的结构示意图;
27.图8是本发明实施例提供的一种自动打包智能垃圾桶的第三皮带轮部位的结构示意图;
28.图9是本发明实施例提供的一种自动打包智能垃圾桶的垃圾袋收口装置的工作原理图;
29.图10是本发明实施例提供的一种自动打包智能垃圾桶的发热丝与切刀的安装示意图。
具体实施方式
30.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
31.请参考图1至图10,本发明的实施例提供了一种自动打包智能垃圾桶,包括桶体1、中盖2、顶盖8、后盖93、电路板7、顶盖开关驱动装置、用于储存和装挂垃圾袋的垃圾袋盒3、用于收拢垃圾袋袋口以实现垃圾袋收口的垃圾袋收口装置4、用于对垃圾袋进行封口并将垃圾袋切断的移动式热塑封切断装置5和抽气投袋装置6等部件,下面将对各个组成部分的结构及其工作原理进行说明。
32.中盖2安装在桶体1的顶部开口处,顶盖8位于中盖2的顶部开口处,顶盖开关驱动装置包括顶盖开关马达211和传动组件,顶盖开关马达211安装在桶体1的背部并通过传动组件(如传动齿轮、传动块、传动杆或其他常见的传动件)与顶盖8的一端传动连接,顶盖开关驱动装置能够带动顶盖8相对于中盖2上下翻转,从而打开或关闭中盖2。
33.垃圾袋盒3安装在中盖2上且位于中盖2的中心孔入口处。
34.具体而言,垃圾袋盒3可以包括四边形环状的盒盖32和四边形环状的盒体31,盒体31的顶部凹设有用于储存垃圾袋的环形槽311,盒盖32安装在盒体31的顶部并盖设于环形槽311的上方,盒盖32的内侧与盒体31的内壁上边沿之间设有供垃圾袋伸出的开口312,盒体31和盒盖32可以由塑胶或硬纸制成。当然,在其他实施例中,盒体31和盒盖32的形状也可以设置为圆环状或其他多边形环状,非本实施例为限。
35.如图4、图5和图6所示,垃圾袋01为环形包装的塑料膜筒料或其他膜装柔性筒料,通过膜料折叠再层叠成多层折叠式环状结构并放置于盒体31的环形槽311中,其一端从盒体31与盒盖32之间的开口312中伸出并穿过垃圾袋收口装置4延展至桶体的底部,该伸出的一端封口以作为第一个垃圾袋的底部,垃圾袋筒料在完全展开时呈长条形筒状。
36.垃圾袋收口装置4安装在中盖2的下端且位于桶体1与中盖2之间,垃圾袋收口装置4能够在前后夹压垃圾袋袋口的同时向内折叠垃圾袋袋口的左右侧,从而将垃圾袋的袋口折平以实现垃圾袋收口。
37.如图7所示,垃圾袋收口装置4可以包括第一压杆41、第二压杆42、压杆平移驱动装置43、第一折叠杆组44和第二折叠杆组45,第一压杆41和第二压杆42相互平行且间隔布置,第一折叠杆组44铰接于第一压杆41的一端与第二压杆42的一端之间,第二折叠杆组45铰接于第一压杆41的另一端与第二压杆42的另一端之间,第一压杆41和第二压杆42均与压杆平移驱动装置43传动连接,压杆平移驱动装置43能够同时带动第一压杆41和第二压杆42向中间平移,从而使第一压杆41和第二压杆42相互接近,第一折叠杆组44、第二折叠杆组45能够在第一压杆41和第二压杆42相接近时向内折叠。
38.进一步地,第一折叠杆组44可以包括第一折叠杆441和第二折叠杆442,第一折叠杆441的一端铰接于第一压杆41的一端,第二折叠杆442的一端铰接于第二压杆42的一端,第一折叠杆441的另一端与第二折叠杆442的另一端相铰接,第二折叠杆组45可以包括第三折叠杆451和第四折叠杆452,第三折叠杆451的一端铰接于第一压杆41的另一端,第四折叠杆452的一端铰接于第二压杆42的另一端,第三折叠杆451的另一端与第四折叠杆452的另
一端相铰接。当然,在其他实施例中,第一折叠杆组44和第二折叠杆组45也可以由三根或以上折叠杆组成,从而使垃圾袋的袋口左右侧折叠成多层,非本实施例为限。
39.具体实施时,压杆平移驱动装置43可以包括压杆平移驱动马达431、第一皮带轮、第二皮带轮432、第三皮带轮433、第四皮带轮434、第一皮带435、第二皮带436和第三皮带437,压杆平移驱动马达431位于第一压杆41的一端,第一皮带轮安装在压杆平移驱动马达431的输出轴上,第二皮带轮432位于第二压杆42的一端,第一皮带轮通过第一皮带435与第二皮带轮432同步连接,第一皮带435垂直于第一压杆41和第二压杆42,第三皮带轮433位于第二压杆42的另一端,第四皮带轮434位于第一压杆41的另一端,第二皮带轮432通过第二皮带436与第三皮带轮433同步连接,第二皮带436平行于第一压杆41和第二压杆42,第四皮带轮434通过第三皮带437与第三皮带轮433同步连接,第三皮带437垂直于第一压杆41和第二压杆42,第一压杆41的一端与第一皮带435的其中一段带体固定连接,第一压杆41的另一端与第三皮带437的其中一段带体固定连接,第二压杆42的一端与第一皮带435的另一段带体固定连接,第二压杆42的另一端与第三皮带437的另一段带体固定连接。
40.为了使到第一压杆41和第二压杆42的平移更加顺畅,第一压杆41与第二压杆42之间可以设置有用于第一压杆41和第二压杆42平移导向的导向滑轨46,导向滑轨46垂直于第一压杆41和第二压杆42布置,第一压杆41的一端和第二压杆42的一端分别与导向滑轨46滑动连接。
41.移动式热塑封切断装置5安装在垃圾袋收口装置4的第一压杆41上。
42.移动式热塑封切断装置5可以包括平移块51、平移块平移驱动装置52、切刀53和两个发热丝54,平移块平移驱动装置52安装在垃圾袋收口装置4的第一压杆41上,平移块平移驱动装置52与平移块51传动连接以带动其沿着垃圾袋收口装置4的第一压杆41的长度方向平移,发热丝54和切刀53均安装在平移块51面向垃圾袋收口装置4的第二压杆42的一侧,发热丝54相互平行且上下间隔布置,切刀53位于两个发热丝54之间。由于移动式热塑封切断装置5采用上下双发热丝设计,两个发热丝可分别对已装满的垃圾袋袋口和下一个垃圾袋的底部进行封口,可实现在垃圾袋筒料的任意位置进行封口和切断,无需在垃圾袋上提前设置断点。
43.较佳的,平移块平移驱动装置52可以包括平移块平移驱动马达521、第四皮带522、第五皮带轮和第六皮带轮524,平移块平移驱动马达521安装在垃圾袋收口装置4的第一压杆41的一端,第六皮带轮524可转动地安装在垃圾袋收口装置4的第一压杆41的另一端,第五皮带轮安装在平移块平移驱动马达521的输出轴上并通过第四皮带522与第六皮带轮524同步连接,平移块51与第四皮带522固定连接。
44.抽气投袋装置6安装在桶体1的桶壁上,抽气投袋装置6能够抽出垃圾袋与桶体1之间的空气使桶体1内形成负压以实现垃圾袋自动抽取投袋。
45.抽气投袋装置6包括抽气马达61和风扇叶轮62,抽气马达61安装在桶体1的桶壁上,风扇叶轮62安装在抽气马达61上并由抽气马达61驱动旋转。
46.电路板7安装在桶体1的背部设有的电池盒11中,后盖93安装在桶体1的背部,顶盖开关驱动装置、垃圾袋收口装置4、移动式热塑封切断装置5和抽气投袋装置6分别与电路板7电连接。
47.在本实施例中,桶体1的内壁上可以设置有用于检测垃圾袋是否满载的满载传感
器91,中盖2的顶部可以设置有用于检测顶盖8的开关的顶盖开关检测传感器92,顶盖开关检测传感器92和满载传感器91分别与电路板7电连接。
48.在其他实施例中,还可以增设能够控制垃圾袋收口装置4和移动式热塑封切断装置5的开关的按键,按键与电路板7电连接,设置按键可便于用户随时开启垃圾袋收口装置4和移动式热塑封切断装置5,用户只需按下按键便可控制垃圾桶自动封口打包垃圾袋。
49.当满载传感器检测到垃圾袋已满载时,压杆平移驱动马达运转同时带动第一压杆和第二压杆向中间平移,使第一压杆和第二压杆相互接近并将垃圾袋袋口的前后部位夹紧压平,过程中第一折叠杆组和第二折叠杆组能够向内折叠,使垃圾袋袋口的左右侧向内折叠成两层(如图9所示),从而使到垃圾袋袋口形成一个均匀平整的打包收口面,然后平移块平移驱动马达带动平移块平移,使平移块上的切刀和两个发热丝从袋口的一端移动到另一端,平移过程中两个发热丝会分别对垃圾袋的两个部位进行热塑封,实现对已装满的垃圾袋袋口进行封口的同时对下一个垃圾袋的底部进行封口,同时切刀会将两个热塑封部位之间切断,使到已装满的垃圾袋的袋口与下一个垃圾袋的底部分离,之后用户可将中盖取出,从而使桶体的开口敞开,此时用户可从桶体的顶部开口处将已打包好的垃圾袋取出,然后再将中盖装上桶体,抽风投袋装置动作将垃圾袋与桶体之间的空气抽出,从而使到桶体内形成负压,此时垃圾袋上方的气压会将垃圾袋压下至桶体内部,使垃圾袋自动从垃圾袋盒中抽出并延展至桶体底部,以完成投袋。
50.综上所述,本发明具有以下优点:
51.1、本发明的结构简单、新颖,设计合理,设置有用于储存和装挂垃圾袋的垃圾袋盒、用于收拢垃圾袋袋口以实现垃圾袋收口的垃圾袋收口装置、用于对垃圾袋进行封口并将垃圾袋切断的移动式热塑封切断装置和用于抽出垃圾袋与桶体之间的空气使桶体内形成负压以实现垃圾袋自动抽取投袋的抽气投袋装置,各个装置动作协调,替代了人手打包垃圾袋,实现了垃圾桶的全自动打包垃圾袋作业,为人们带来便利。
52.2、本发明的压杆平移驱动装置能够同时带动两条压杆向中间平移靠拢和带动两组折叠杆向内折叠,从而使垃圾袋袋口在折叠杆的左右向内折叠和压杆的前后对齐压紧作用下形成一个均匀平整的打包收口面,实现垃圾袋的匀称收口,垃圾袋的四周用量均匀,挤压收口面平整,相比于传统的单边移动式压紧收口方式和单角聚拢压紧收口方式具有更好的收口效果,可保证后续垃圾袋的密封稳定性,可适用于各种不同厚度的垃圾袋,受力平稳,速度快。
53.3、本发明的移动式热塑封切断装置采用热塑封封口和切刀切断,相比于传统的智能垃圾桶的热熔断切断封口方式具有更好的封口效果,封口强度高,封口牢固,能够适应各类垃圾袋的可靠封口。
54.上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1