一种提升机用筒体传感智能闸的制作方法
1.本发明属于矿井提升机设备现场安全运行、维护和监控领域,具体涉及一种提升机用筒体传感智能闸。
背景技术:
2.矿用提升机是金属矿和煤炭井下开采运输的关键设备,提升机的安全运行关键在于制动系统的制动力需要维持在安全限度以内,才能保证全系统在工作过程中的工作制动和安全紧急制动的可靠性,而制动系统的关键环节在于制动闸,以往采用的制动闸是不能数字化监视其制动力大小的,解决此技术问题的关键在于将制动闸升级为能够实现力监控型并实现远传数字操控、实时监视、运行和故障情况记录、维护维修报警的智能闸,从而实现对制动闸的远程智能化控制。
技术实现要素:
3.为解决上述制动闸不能数字化监视其制动力大小的技术问题,本发明提供一种提升机用筒体传感智能闸。
4.本发明的目的是采用以下技术方案来实现。依据本发明提出的一种提升机用筒体传感智能闸,包括固定设置的外壳体,外壳体内的头部滑动设置有筒体、尾部轴向可调节移动设置油缸,油缸内的活塞与传力中轴连接,传力中轴的另一端与固定筒体的传感器连接,筒体上固定有闸瓦,传力中轴与油缸之间设置由活塞带动传力中轴移动从而使其蓄积弹力的碟簧,所述传力中轴通过传感器与筒体连接,传感器包括与传力中轴连接的中间部分、与筒体连接的外圆周部分以及中间部分与外圆周部分之间的用于将碟簧蓄积的弹力从中心部分传递至外圆周部分并发生形变的连通辐条;连通辐条的侧壁设置将形变转换为电信号的应变片,传感器上设置用于处理电信号且与外围的电气控制系统连接的集成放大电路。
5.进一步的,所述传力中轴靠近传感器一侧端部的内部设置空腔且开设有连通传力中轴外端面与空腔的主螺钉通过孔,主螺钉通过孔对应位置处的传感器上开设有内径小于主螺钉通过孔的主螺钉连接孔,主螺钉连接孔上螺纹连接有主螺钉,主螺钉的主体位于主螺钉通过孔及传力中轴内的空腔中,并且主螺钉的主体与螺柱部分之间形成的限位台阶压在传感器上;传力中轴内部的空腔与主螺钉通过孔之间形成的传力截面与主螺钉头部之间设置提供预紧力的主弹簧。
6.进一步的,所述传感器与传力中轴接触的面上设置多个定位螺纹孔,定位螺纹孔围绕主螺钉连接孔均匀分布,与定位螺纹孔位置对应的传力中轴的端面上设置定位孔,定位螺纹孔内螺纹连接有起防转作用的定位螺钉,定位螺钉的另一端部插设在定位孔中。
7.进一步的,所述传力中轴靠近传感器的端部外圆周面上设置碟簧台,碟簧套设在传力中轴上且其一端抵在碟簧台上、另一端与油缸之间设置碟簧垫。
8.进一步的,所述传力中轴、碟簧、传感器均设置在筒体内部,筒体靠近闸瓦的内壁环向设置筒体传力台,传感器的外圆周上设置与筒体传力台匹配的传力平台,筒体传力台
设置在传力平台与闸瓦之间;筒体传力台上开设有预紧螺纹孔,与预紧螺纹孔对应位置的传感器上开设有预设孔,预设孔的内径大于预紧螺纹孔的内径,预设孔内嵌套有一端抵在筒体传力台上、另一端伸出预设孔的锁紧内套,锁紧内套的伸出预设孔部分套设有提供预紧力的锁紧碟簧,预紧螺纹孔螺纹连接有预压螺钉,预压螺钉的主体穿过锁紧内套且螺纹头压在锁紧碟簧上。
9.进一步的,所述传感器的整体形状为圆盘状,其中心部分、连通辐条、外圆周部分处于同一平面上。
10.进一步的,所述传感器上设置四条或八条均匀分布的连通辐条,每条连通辐条的两侧壁上均对称设置应变片或每条连通辐条的其中一个侧壁设置应变片。
11.进一步的,所述传感器的中间部分与外圆周部分均匀分布零或四条中断辐条,中断辐条间隔设置在两条连通辐条之间的中间位置。
12.进一步的,所述活塞中间穿设有连接螺栓,螺栓与活塞之间设置活塞内套,连接螺栓的头部螺纹与传力中轴螺纹连接,同时紧密夹持活塞内套与活塞。
13.与现有技术相比,该发明的有益之处在于:1、本发明在提升机制动时,能够通过提升机的筒体传感智能闸的传力中轴结合传感器检测到制动过程中的动态正压力信号,并且在开闸时,通过传感器及其传力联动机构拖动筒体在外壳体内滑动,使得闸瓦对闸盘的正压力泄到零,为提升机智能闸制动正压力的判断提供了一种直接的定量手段,有助于直观快速检测信号并实现对模拟信号的数字化变换,工作人员能够快速了解提升机智能闸制动正压力数值情况,并在必要时迅速做出判断及调整,保证提升机的制动安全;普通闸不能监视制动力的大小,在设备运行时出现安全隐患时不能及时发现,相对来说,智能闸却能获取制动力的模拟电信号并具备远传能力,经过计算机分析和控制,既能动态直观监视制动力安全数值又能根据安全极限界定做出报警,从而使整机控制中心做出安全措施,免除事故发生的隐患;
14.2、本发明通过对智能闸的真实制动正压力的直接检测并经计算机智能化分析,将智能闸实测的制动力延伸到验证提升机系统运行状态下的总制动力矩,以判断其是否符合国家颁布的有关安全规范要求,对矿山运行设备工程实践有着特别的现实意义;
15.3、普通闸的连接轴穿过普通闸筒体的底部并紧配合安装,在贴紧闸盘做制动刹车时,闸盘对闸瓦产生沿闸瓦表面作用的摩擦力,通常会因摩擦力致使紧密固定连接在一体的普通闸的筒体、连接轴、活塞、连接螺栓、活塞内套发生朝上或者朝下的撬动,密封件就会承受上下不对称的压迫力,由此诱发被密封件密封在内腔的油液渗漏,这也是普通闸的安全隐患,智能闸代替普通闸连接轴的是智能闸的传力中轴,因为中轴传力面与智能闸传感器受力体传力面是一种表面压紧接触关系,其不会传递筒体的撬动;密封件具有很好的均匀受力关系,因此对油液的密封性能保持完好,也不会出现由油液渗漏诱发的安全制动单元的安全隐患;普通闸制动时普通闸的连接轴与筒体一道出现撬动,普通闸的连接轴的底盘根部会产生局部应力集中,从而造成裂纹产生,经常出现突发的连接轴的底盘根部脱离造成开闸失败,损坏的普通闸非正常地合闸刹车损坏闸盘,因为普通闸没有监控信号,不能提供报警信号和整机应急保险动作,造成设备安全隐患;但智能闸的传力中轴代替其传力职能,不会出现突发损坏现象,由于智能闸具备了制动力的监控信号,即使智能闸出现非正常制动情况也会被直观发现并可以采用声光报警等措施,促使总控系统采取应急保护动
作。
16.上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明如下。
附图说明
17.图1为安装本发明一种提升机用筒体传感智能闸的实施例后的提升机的主视图;
18.图2为图1的俯视图;
19.图3为本发明一种提升机用筒体传感智能闸的实施例的立体图;
20.图4为图3中a处的剖视图;
21.图4a为现有技术中普通闸的剖视图;
22.图5为图4中筒体的右视图;
23.图6为图1中智能闸对闸盘合闸的示意图;
24.图7为图4中传感器及其传力联动机构总成的剖视图;
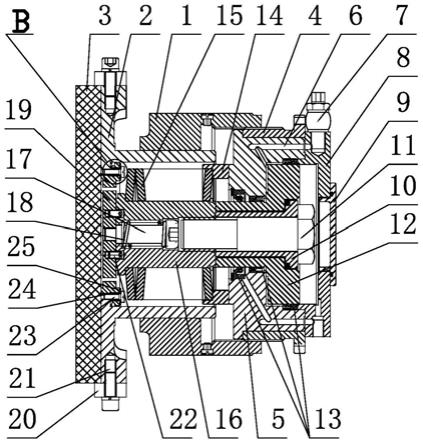
25.图8为图4中b处的局部放大图;
26.图9为图4中传力中轴的剖视图;
27.图10为图4中主螺钉的正视图;
28.图11为图4中主弹簧的正视图;
29.图12为图4中锁紧内套的剖视图;
30.图13为图4中锁紧碟簧的剖视图;
31.图14为图4中传感器的左视图;
32.图15为图14中c处的剖视图;
33.图16为图14中d处的剖视图;
34.图17为图15中e处的剖视图;
35.图18为图14中g1处的局部视图;
36.图18a为图14中g2处的局部视图;
37.图19为图4中的传感器的桥式检测电路的示意图。
38.【附图标记】
39.i-闸盘,ii-智能闸,iii-闸座,iv-轴承座,v-支承梁,vi-卷筒,vii-钢丝绳;
40.1-外壳体,2-筒体,2a-普通闸的筒体,201-预紧螺纹孔,202-引线孔道,203-筒体传力台,3-闸瓦,4-调整螺母,5-油缸,6-进油道,7-进油口接头,8-油缸盖,9-端盖,10-活塞内套,11-连接螺栓,12-活塞,13-密封件,14-碟簧垫,15-碟簧,16-传力中轴,16a-普通闸的连接轴,16b-普通闸的连接轴的底盘根部,1601-中轴传力面,1602-定位孔,1603-主螺钉通过孔,1604-碟簧台,1605-传力截面,1606-主弹簧空间,1607-主螺钉头部空间,1608-连接螺栓空间,1609-中轴连接丝扣,17-主螺钉,1701-弹簧压紧面,1702-主螺钉连接丝扣,1703-限位台阶,18-主弹簧,19-传感器,1901-预设孔,1902-预紧面,1903-微电路走线槽,1904-传感器外径面,1905-辐条接触内环面,1906-辐条接触外环面,1907-受载面,1908-连通辐条,1909-中断辐条,1910-主螺钉连接孔,1911-定位螺纹孔,1912-受力体传力面,1913-传感器对筒体传力面,1914-传力平台,1915-中断辐条间隙,1916-外引信号电缆通
孔,1917-传感器体内走线过道,20-压条,21-压紧螺钉,22-定位螺钉,23-预压螺钉,24-锁紧内套,25-锁紧碟簧,26-固定螺钉,27-制动正压力,28-油压;
41.d1-中轴传力面的直径,d2-主弹簧的直径,d3-主弹簧原材料的直径,b1-主弹簧的自由长度,b2-锁紧内套的高度,b3-主螺钉的有效长度,b4-锁紧碟簧的弓高,b5-传力中轴的底部厚度,b6-传力平台的厚度。
具体实施方式
42.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
43.如图1至图19以及图18a所示为本发明一种提升机用筒体传感智能闸的一个实施例,图4a为现有技术中的普通闸的示意图。为方便配合对一种提升机用筒体传感智能闸的实施例完整叙述其各项结构件的功能,延伸引述与智能闸配合的各零部件的内容。
44.提升机的主轴装置包括卷筒vi,卷筒vi上缠绕有钢丝绳vii,卷筒vi的转轴的两端设置在对应的轴承座iv上,轴承座iv设置在支撑梁v上。卷筒vi的两端均设置闸盘i,每个闸盘i的两侧对称设置一对智能闸ii,在本实施例中,每个闸盘i上分布设置四对智能闸ii,四对智能闸ii两两对称设置在卷筒vi的两侧。智能闸ii固定在对应的闸座iii上。以其中一个智能闸ii为例进行说明。定义各个零部件靠近闸盘i的一侧为头部,另一侧为尾部。
45.智能闸ii包括外壳体1,外壳体1的一端紧固安装在闸座iii上,另一端设置中轴线与闸盘i垂直的通孔,该通孔在靠近闸盘i的头部为光孔,尾部为螺纹孔。外壳体1的光孔滑动设置有筒体2,螺纹孔螺纹连接有调整螺母4。
46.筒体2的圆环体部分滑动设置在外壳体1的光孔内,位于外壳体1的外侧部分为长方形板,筒体2上开设有在轴向贯通的通孔。筒体2头部的通孔内壁环向设置筒体传力台203,贯穿筒体传力台203设置预紧螺纹孔201,在本实施例中,预紧螺纹孔201对称设置两个。筒体2的长方形板上对称开设有引线孔道202,引线孔道202从筒体2的通孔内壁贯通至长方形板的外壁。
47.筒体2的长方形板的上下端部开设有螺纹孔,其外侧面紧贴设置闸瓦3,闸瓦3的两端面与长方形板的上下端面平齐,闸瓦3及长方形板上的两端面均盖设有压条20,压紧螺钉21穿过压条20并拧入长方形板的螺纹孔,使得压条20压紧闸瓦3,使闸瓦3固定在长方形板上。
48.位于外壳体1外侧的调整螺母4的端部周向设置圆台,圆台上分布设置缺口,便于旋转调整螺母4,进而调节调整螺母4在螺纹孔中的轴向位置。调整螺母4内设置轴向贯通的空腔,空腔内安装有油缸5,油缸5内设置有活塞12。调整螺母4、油缸5两者的尾部端面安装有油缸盖8,用于对油缸5进行封闭,油缸盖8使用固定螺钉26固定在油缸5上,封闭套在油缸5上的处于间隙配合滑动连接的调整螺母4。旋转调整螺母4,也可以调整油缸5及其内部活塞12的整体位置。
49.活塞12与油缸5之间还设置有用于防止油液渗漏且呈滑动接触的密封件13。油缸5上开设有进油道6,油缸盖8的外圆周面上开设有进油口接头7,并与进油道6连通,用于输油
或排油。向油缸5内输油,活塞12向尾部移动,油缸5向外排油,活塞12向头部移动。活塞12的尾部的轴向移动范围在油缸5的尾部与油缸盖8的头部之间形成的空腔内。活塞12的头部伸出油缸5的头部。
50.贯穿活塞12安装有连接螺栓11,连接螺栓11和活塞12之间安装有活塞内套10,用于对连接螺栓11起支撑作用。连接螺栓11的头部的螺柱部分伸出活塞12,尾部位于油缸5的尾部的空腔中。在连接螺栓11对应位置处的油缸盖8上开设有通孔,该通孔处设置端盖9,用于密封该通孔,打开端盖9后,可以对油缸5进行检修。
51.筒体2的内部设有传力中轴16,传力中轴16与筒体2的中心线重合。传力中轴16轴向开设有通孔,通孔的尾部为连接螺栓空间1608,连接螺栓空间的内壁设置中轴连接丝扣1609,通孔的头部为主弹簧空间1606,主弹簧空间1606与连接螺栓空间1608之间为主螺钉头部空间1607。连接螺栓11通过其伸出活塞12的连接螺纹与连接丝扣1609螺纹连接,同时将活塞12及活塞内套10夹持在连接螺栓11与传力中轴16之中。
52.筒体2的内部还设有碟簧15,传力中轴16外圆周面套设有多片碟簧15。在碟簧15和油缸5之间安装碟簧垫14,用于传递碟簧力并具备限制油缸5与碟簧15之间距离的作用。靠近头部的传力中轴16的外圆周面上一体设置碟簧台1604,碟簧台1604的外径大于传力中轴16的主体的外径。碟簧15的一端面紧密接触碟簧垫14,另一端面紧密接触碟簧台1604。
53.传力中轴16的头部端面设置中轴传力面1601,中轴传力面1601高出碟簧台1604端面,中轴传力面1601上安装有传感器19,中轴传力面1601使得传感器19与传力中轴16紧密接触。中轴传力面1601的中心位置开设有主螺钉通过孔1603,主螺钉通过孔1603与传力中轴16上的主弹簧空间1606连通,主螺钉通过孔1603的直径小于主弹簧空间1606的直径,主弹簧空间1606的头部端面为传力截面1605。围绕主螺钉通过孔1603的中轴传力面1601上分布开设多个定位孔1602。
54.传感器19整体为圆盘状,其中心部分厚度小于外圆周部分,且中心部分的两侧面高度均低于外圆周部分。传感器19的中心部分与外圆周部分通过四条均匀分布的连通辐条1908连接,中心部分还与外圆周部分之间设置中断辐条1909,中断辐条1909与连通辐条1908相互间隔并均匀分布。中断辐条1909、连通辐条1908的两侧面与传感器19的中心部分平齐。中断辐条1909分为两段,两段中断辐条1909之间存在中断辐条间隙1915。传感器19的中心部分的外圆周面为辐条接触内环面1905,外圆周部分的内圆周面为辐条接触外环面1906,外圆周部分的外圆周面为传感器外径面1904。
55.传感器19的其中一侧面为与中轴传力面1601紧密接触的受力体传力面1912,另一侧面为与朝向闸瓦3的受载面1907,受力体传力面1912、受载面1907均位于传感器19的中心部分。传感器19的外圆周部分与闸瓦3为非紧密接触。
56.传感器19的外圆周部分的最外侧为传力平台1914,传力平台1914朝向闸瓦3的一侧面为传感器对筒体传力面1913,传感器对筒体传力面1913低于传感器19的外圆周部分的端面。传力平台1914的另一侧面与传感器19的外圆周部分的端面平齐,与该侧面平齐的传感器19的外圆周部分的端面为预紧面1902。围绕传力平台1914的外圆周面开设有环形的微电路走线槽1903,微电路走线槽1903的底部开设有贯通传感器19的外圆周部分的走线过道1917,走线过道1917围绕传感器19的中心均匀分布。贯穿传感器19的外圆周部分开设有外引信号电缆通孔1916。
57.传感器19的中心位置开设主螺钉连接孔1910,主螺钉连接孔1910贯穿传感器19,主螺钉连接孔1910螺纹连接有主螺钉17。主螺钉17的头部的主螺钉连接丝扣1702与主螺钉连接孔1910连接,主螺钉17的尾部位于主螺钉头部空间1607,其主体穿过主弹簧空间1606、主螺钉通过孔1603。主螺钉的有效长度为b3。主螺钉连接丝扣1702与主螺钉17的主体之间形成的台阶面为限位台阶1703,限位台阶1703抵在传感器19的配合面上。主螺钉17的尾部螺钉头与主螺钉17的主体之间形成的台阶面为弹簧压紧面1701。
58.主螺钉17的主体外圆周面上套设有主弹簧18,主弹簧18的两端面均为平面,其中一端面抵在弹簧压紧面1701上,另一端面抵在传力截面1605上。在本实施例中,主弹簧18的自由长度b1尺度范围为60-80mm,预压缩后其工作状态的长度为40-55mm,主弹簧18的直径d2尺度范围为24-26mm,主弹簧18原材料直径d3的尺度范围为2.5-4mm。限位台阶1703的设计目的是限制主弹簧18在传力中轴16内腔的预压缩量。
59.主螺钉的有效长度b3为两部分长度叠加,即主弹簧经预压缩后的长度与传力中轴的底部厚度b5之和,具体数值为50-60mm,其中传力中轴的底部厚度b5即为主螺钉通过孔1603的长度。
60.围绕主螺钉连接孔1910的受力体传力面1912上设置定位螺纹孔1911,定位螺纹孔1911与定位孔1602一一对应,定位螺钉22的头部与定位螺纹孔1911螺纹连接,尾部自由嵌套在定位孔1602内,限制传力中轴16发生转动。定位螺钉22的数量为2-4个,对应的,定位螺纹孔1911、定位孔1602的数量与定位螺钉22的数量相等,定位螺钉的长度为5-30mm。
61.传感器19的传力平台1914上开设有贯穿传感器19的预设孔1901,预设孔1901与筒体2上的预紧螺纹孔201一一对应。传力平台1914上的传感器对筒体传力面1913紧压在筒体传力台203上。预设孔1901内安置有锁紧内套24,并且锁紧内套24一端抵在筒体传力台203上,另一端伸出预设孔1901,伸出部分套有锁紧碟簧25,使用预压螺钉23从锁紧内套24的孔中穿入并紧固在预紧螺纹孔201中,预压螺钉23的头部螺钉头抵在锁紧碟簧25上,锁紧碟簧25靠近中心部分向预压螺钉23的头部凸起。锁紧碟簧25被传感器19与预压螺钉23预压变形而储备一定弹簧预紧力,预紧力由锁紧内套的高度b2限制决定。锁紧内套的高度b2为8-12mm,外径为6-10mm。
62.其中一条连通辐条1908的两侧壁分别设置应变片r1、r2,其设置方式如图18、18a所示,应变片与连通辐条的延伸方向呈45度夹角,并且r1、r2对称设置在两侧壁上。共有四条连通辐条1908,其余三条连通辐条1908的两侧壁上分别设置r3、r4、r5、r6、r7、r8,其设置方式均与r1、r2相同。
63.在其他实施例中,传感器19的连通辐条为4个或8个,中断辐条为0-4个。
64.连接螺栓11通过活塞内套10与活塞12连接,连接螺栓11与传力中轴16连接,传力中轴16通过主螺钉17、主弹簧18与传感器的中心部分弹性连接,传力中轴16还通过定位螺钉22与传感器19防转连接,传感器19的外圆周部分通过预压螺钉23、锁紧内套24、锁紧碟簧25与筒体2弹性连接,筒体2通过压条20、压紧螺钉21与闸瓦3连接。活塞12移动,带动连接螺栓11移动,从而带动传力中轴16、传感器19、筒体2、闸瓦3移动,从而实现闸盘i两侧的闸瓦3一起挤压闸盘i或离开闸盘i,实现合闸、开闸的动作。其中,传感器19的传力联动机构包括连接螺栓11、传力中轴16、主螺钉17、定位螺钉22,传感器19及其传力联动结构以及活塞内套10、活塞12、预压螺钉23、锁紧内套24、筒体2、闸瓦3形成紧密连接的固定结构件。主弹簧
18、锁紧碟簧25形成紧密连接的弹性结构件。
65.本发明实施例的工作过程如下:
66.在完整介绍智能闸在开闸、合闸形成制动正压力的机理之前,先对两个预紧力做提前介绍,以备理解智能闸开闸、合闸左右移动的跟随关系,这两个预紧力分别为预紧力i、预紧力ii:
67.预紧力i:锁紧内套24依次穿过锁紧碟簧25、预设孔1901,锁紧碟簧25的弓高b4的尺度与传感器19的传力平台1914的厚度b6之和大于锁紧内套24的尺度b2,即b4+b6>b2,预压螺钉23穿过锁紧内套24以丝扣形式紧固到筒体2的预紧螺纹孔201中,并将锁紧内套24压紧,此时锁紧碟簧25被预压变形并蓄积一定的预紧力i,由此传感器19与筒体2之间被预紧力i锁紧,其预紧内力i估值范围为15-20kg。
68.预紧力ii:传力中轴16的中轴传力面1601是紧密压着传感器19的受力体传力面1912的,其原因是主螺钉连接丝扣1702穿过主螺钉通过孔1603后紧固到主螺钉连接孔1910里面,此时主弹簧18也被预压紧且变形到预定的位置,主弹簧18的内部被蓄积了预紧力ii,此预紧力ii就是压紧到传力截面1605的力度,进而此预紧力ii被传递到中轴传力面1601转而变为对受力体传力面1912的预紧力ii,此预紧力ii被认为是传感器19与传力中轴16之间的预紧力ii,其预紧力ii估值范围为30-60kg;
69.在本实施例中,锁紧碟簧有两个,原则上考虑力的传递方向及其实用性,预紧力应符合:预紧力ii≥2
×
预紧力i。
70.智能闸ii在合闸时,闸瓦3对提升机的闸盘i释放正压力,对转动的闸盘i产生摩擦力矩以便提升机制动刹车,此时油缸5的内腔里的压力油液经过进油道6泄放到液压站的油箱内,此时碟簧15在变形蓄积力作用下开始回弹,此回弹所发生的连带动作传递过程是:靠近闸盘i一侧的一片碟簧紧压在碟簧台1604上,从而产生向闸瓦3一侧的推动力,使得传力中轴16向闸盘i一侧动作,并连带连接螺栓11、活塞内套10、活塞12、主螺钉17、主弹簧18、传感器19、筒体2、闸瓦3沿着外壳体1向闸盘i一侧滑动,直至闸瓦3将制动正压力施加到闸盘i上。碟簧15的预先压缩力释放路径为:每一片碟簧15的蓄积力逐级传递累加到靠近闸盘i一侧的一片碟簧施加到传力中轴16的碟簧台1604上,接下来传力中轴16的中轴传力面1601将力传递到传感器19的受力体传力面1912处,这时碟簧15的总蓄积力由传力中轴16的直径为d1的中轴传力面1601接触传递到传感器19上与之同样的受力面积上,接下来此总蓄积力通过传感器19上的所有连通辐条1908将力传递到与所有辐条连接的辐条接触外环面1906以外的实体材料上,接着由传感器对筒体传力面1913接触传递到筒体2的筒体传力台203处,筒体传力台203圆周范围以外的筒体2的平面部分与闸瓦3接触,将正压力传递并施加到提升机的闸盘i上。闸盘i上接受到的每个智能闸的正压力都是通过传感器19传递的,传感器19借用连通辐条1908上所布置的敏感电子器件来感知正压力应变信号并将其转换成电信号输出,敏感电子器件在本实施例中采用应变片。
71.为使智能闸ii开闸,让闸瓦3离开提升机的闸盘i,由提升机液压站提供具有一定压强28的液压油,并从进油道6进入油缸5的内腔,推动活塞12向尾部运动,活塞12带动活塞内套10、连接螺栓11、传力中轴16、传感器19、筒体2及闸瓦3向远离闸盘i的一侧运动并压缩碟簧15,在碟簧15内蓄积能量,碟簧垫14对碟簧15的总压缩变形量具有限制作用,传力中轴16设在碟簧15的中心,可引导碟簧15沿传力中轴16的轴向压缩变形,防止碟簧15在移动过
程中发生横向错位移动,碟簧15压缩变形蓄积的力量将作为合闸时在闸瓦3与闸盘i之间形成制动正压力27的条件,以便在需要时对旋转中的提升机的闸盘i实施刹车制动。
72.智能闸ii在开闸过程中,贴紧闸盘i的闸瓦3从最大正压力到零正压力并逐步离开闸盘i,并且正压力随之逐步消失,来自碟簧15的蓄积预紧力作用到闸盘i上的正压力撤除后,传感器19上所感受的正压力也会随之消失;开闸时,压力油液从进油道6进入油缸5的腔体内,活塞12连同活塞内套10、连接螺栓11、传力中轴16、传感器19、筒体2、闸瓦3向远离闸盘i的一侧移动,此时传力中轴16的碟簧台1604与碟簧15的接触面压缩最靠近闸盘i的碟簧15,致使多片碟簧15被压缩变形并随之蓄积弹力;开闸后,传力中轴16带动传感器19和固定有闸瓦3的筒体2在外壳体1内向远离闸盘i的一侧滑动,闸瓦3与闸盘i之间正压力的撤除,使得传感器19检测到力的消失。
73.两个预紧力是抵抗筒体2在外壳体1内滑动所派生摩擦阻力的条件。在开闸动作启动时,为让传感器19和筒体2跟随传力中轴16同时向远离闸盘i的一侧滑动,就必须满足预紧力ii大于筒体2在外壳体1内的滑动摩擦阻力,否则当传力中轴16移动时,如果筒体2的滑动摩擦阻力比主弹簧18被预压缩后所施加的力度大,由此会造成主弹簧18继续被压缩,从而造成传力中轴16的中轴传力面1601会脱离传感器19的受力体传力面1912,传力中轴16移动时也就不能连带筒体2在外壳体1内实现滑动,闸瓦3也就不能离开闸盘i形成开闸动作。智能闸ii开闸还需满足2
×
预紧力i》筒体2在外壳体1内的滑动摩擦阻力,预紧力i在智能闸系统开闸过程中,预紧力i传递过程为:传力中轴16被活塞12带动,被主螺钉17压缩的主弹簧18得到向远离闸盘i一侧移动的驱动力,主螺钉17移动时带动传感器19移动,锁紧碟簧25被传感器19上的预紧面1902驱动并移动,接着带动预压螺钉23和筒体2及闸瓦3移动实现开闸的完整动作,此时闸瓦3所受正压力泄为零,提升机正常进入提升工作程序。如果2
×
预紧力i<筒体2在外壳体1内的滑动摩擦阻力,不能将预紧力ii传递至筒体2上,无法使筒体2及时移动。
74.传感器19是实现力学量转换到电学量的敏感器件,激励电压u
输入
是输入给传感器19的桥式检测电路的工作电压,传感器19的连通辐条的两侧壁布置的应变片所感应的受力信号经桥式检测电路转化成δu
输出
电压变化量,并输出送入布置在传感器19的连通辐条1908与中断辐条1909之间空间内部的集成放大电路进行处理,再输出并远传到外围电气控制系统做集中控制应用。传感器19的每个连通辐条的两个侧壁均布置应变片,每个连通辐条的两个对称侧壁各布置一个应变片,共计8片,或者,每个辐条的二个侧面任选一个侧面布置一个应变片,共计4片。如果应变片r1-r8按照图19所示的电路连接方式连接到传感器内的集成微电路处理板上,力学应变量被转化成电信号输出的公式化表达如下:
75.应变片的丝栅电阻值表达为r,在应变片粘贴位置因受力出现微小应变时,电桥电路的输出电压变化量δu
输出
与输入激励电压u
输入
的比值存在如下关系等式:
76.δu
输出
/u
输入
=((δr1+δr3)/(r1+r3)+(δr5+δr7)/(r5+r7)-(δr2+δr4)/(r2+r4)-(δr6+δr8)/(r6+r8))/4;
77.一般情况下的各个应变片的阻值相等:r=r1=r2=r3=r4=r5=r6=r7=r8,δu
输出
/u
输入
=((δr1+δr3)+(δr5+δr7)-(δr2+δr4)-(δr6+δr8))/8r;
78.通常情况单个应变片在受力应变情况下,其电阻值的变化率与应变片的应变量存在如下关系等式:
79.δr/r=kε;
80.其中,k为应变片的灵敏系数,这是应变片本体材料固有常数,一般为k=2(无量纲),r为应变片阻值(欧姆),δr为应变片阻值变化量(欧姆),ε为应变片粘贴位置的应变量(无量纲)。
81.电桥的输出电信号(即电桥输出电压的变化量δu
输出
)相对输入激励电压的变化率由下面等式进行计算:
82.δu
输出
/u
输入
=k((ε1+ε3+ε5+ε7)-(ε2+ε4+ε6+ε8))/8
83.传感器通过应变片检测应力、信号变换和计算是现有常用技术,在此不再赘述。
84.尽管已经展示和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1