一种新型化妆品粉盒组合包装设备的制作方法
1.本实用新型涉及化妆品包装技术领域,特别是一种新型化妆品粉盒组合包装设备。
背景技术:
2.粉饼,由多种粉体原料(包括颜料)及黏合剂(油脂成分)经混合、压制而成的饼状固体美容制品,具有遮盖、附着、涂展、赋色、修饰的功能,粉饼造就轻柔的哑光质感,粉饼的魅力在于滑爽、轻盈的触感,通常粉饼都装在配套的粉盒内,小巧的粉盒,既便于外出携带,使用起来也方便。
3.在化妆品的粉饼包装生产线上,当粉饼生产完成后通常都会按次序装在托盘内,然后再将一摞摞装满粉饼的托盘运送到装盒的工序,就是说将托盘内的粉饼一个个的摆好角度放置到粉盒中,现有的生产工序通常采用人工放置,但这种方式效率低下,而且粉饼入盒的角度得不到统一,影响产品美观,因此需要研发一种包装设备。
技术实现要素:
4.本实用新型的目的是为了解决上述问题,设计了一种新型化妆品粉盒组合包装设备。
5.实现上述目的本实用新型的技术方案为,一种新型化妆品粉盒组合包装设备,包括机台和设置于机台外侧的机柜,其还包括:
6.载物升降机构,设置于所述机柜的内部用于负载化妆品粉饼并通过升降的方式将其传递到指定位置;
7.吸取上料搬运机构,安装在所述机柜的上部用于将载物升降机构上的化妆品粉饼吸取搬运到下一道工序;
8.5号并联机器人,安装在所述机台的上部用于将化妆品粉饼搬运到指定位置;
9.6号scara机器人,安装在所述机台上用于将化妆品粉饼吸取搬运到化妆品粉盒中;
10.所述机台上还设置有粉饼传送装置、缓冲料仓轨道和多个视觉相机组件。
11.作为本实用新型的进一步描述,所述载物升降机构设有两个,且呈竖向平行设置,所述载物升降机构包括升降装置和载物台,所述载物台安装在所述升降装置上。
12.作为本实用新型的进一步描述,所述吸取上料搬运机构包括设置于所述机柜上的线轨和导轨、安装在线轨和导轨上的基座、安装在基座上的导轨、线轨和上料搬运组件,其中所述上料搬运组件和安装在基座上的导轨和线轨滑动连接,安装在机柜上导轨的一端以及安装在基座上导轨的两端都分别设置有限位件。
13.作为本实用新型的进一步描述,所述粉饼传送装置和其中一个所述载物升降机构处于同一轴线上,所述粉饼传送装置与所述缓冲料仓轨道平行。
14.作为本实用新型的进一步描述,所述视觉相机组件设有三个,其中有一个所述视
觉相机组件位于所述5号并联机器人的旁边,并正对着所述粉饼传送装置,有一个位于所述缓冲料仓轨道的上方,并正对着所述缓冲料仓轨道的端部。
15.作为本实用新型的进一步描述,所述机台的外侧还设置有粉盒传送台,所述粉盒传送台与所述粉饼传送装置和所述缓冲料仓轨道垂直。
16.作为本实用新型的进一步描述,所述缓冲料仓轨道的端部还设置有传感器,所述视觉相机组件位于所述粉盒传送台的上方,所述视觉相机组件在所述粉盒传送台上的投影和所述缓冲料仓轨道处于同一直线上。
17.作为本实用新型的进一步描述,所述5号并联机器人包括多方位移动组件和安装在多方位移动组件端部的旋转吸盘组件。
18.作为本实用新型的进一步描述,所述6号scara机器人包括移动机械臂以及安装在移动机械臂端部的旋转吸盘组件。
19.其有益效果在于,本实用新型提供的粉饼包装设备自动化程度高,吸取上料搬运机构将载物升降机构上的粉饼按次序放到粉饼传输装置上,当粉饼传送到指定位置后由5号并联机器人将粉饼吸取搬运到缓冲料仓轨道上,粉盒传送台用于传送粉盒,传感器用于感应粉盒的位置,然后6号scara机器人会将粉饼吸取并旋转调整角度后放到粉盒内,而视觉相机组件会检测粉饼的位置和角度,整套设备的包装操作完全不需要人工,可以极大提高工作效率,减少人工成本,粉饼入盒的角度是统一的,因此具有很强的推广和应用价值。
附图说明
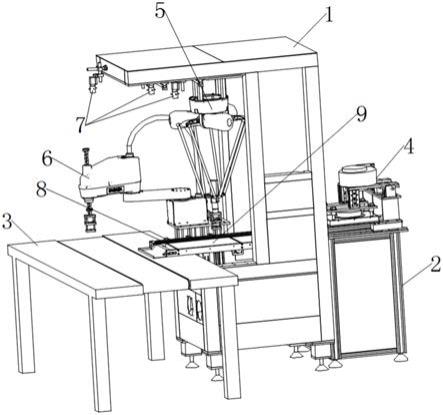
20.图1是本实用新型的结构示意图;
21.图2是本实用新型所述的机柜及安装在机柜上各组件的结构示意图;
22.图3是本实用新型所述的机台及安装在机台上各组件的结构示意图;
23.图4是图3的另一视角结构示意图。
24.图中,1、机台;2、机柜;3、粉盒传送台;4、吸取上料搬运机构;5、 5号并联机器人;501、多方位移动组件;6、6号scara机器人;601、移动机械臂;7、视觉相机组件;8、缓冲料仓轨道;9、粉饼传送装置; 10、载物升降机构;1001、升降装置;1002、载物台;11、线轨;12、上料搬运组件;13、导轨;14、限位件;15、基座;16、旋转吸盘组件;17、传感器。
具体实施方式
25.首先说明一下本实用新型的设计初衷,粉饼的表面有很多纹路,为了包装的统一性,在包装的过程中需要校准角度,然后再将粉饼放入粉盒内,一般都是通过人工完成的,这就可能导致粉饼入盒的角度不统一,影响美观,后续销售也会产生影响,因此需要研发一款包装设备来改善这种状况,为此本实用新型提供了一种新型化妆品粉盒组合包装设备。
26.下面结合附图对本实用新型进行具体描述,如图1
‑
4所示,该设备主要包括机台1、设置于机台1外侧的机柜2和粉盒传送台3,其中在机柜2的内部设置有两个载物升降机构10,它的作用就是用于负载化妆品粉饼并通过升降的方式将其传递到指定位置,而在机柜2的上部设置有吸取上料搬运机构4,它的作用就是将载物升降机构10上的粉饼吸取并搬运到下一道工序;在机台1上设置有粉饼传送装置9和缓冲料仓轨道8,都是用于传送粉饼的,其中在机台1的上部、位于粉饼传送装置9的上方设置有5号并联机器人5,它用于将粉饼传
将粉饼吸取调整角度后会放置到粉盒内,确保每一个入盒的粉饼角度是一致的。
31.上述技术方案仅体现了本实用新型技术方案的优选技术方案,本技术领域的技术人员对其中某些部分所可能做出的一些变动均体现了本实用新型的原理,属于本实用新型的保护范围之内。
技术特征:
1.一种新型化妆品粉盒组合包装设备,包括机台(1)和设置于机台(1)外侧的机柜(2),其特征在于,其还包括:载物升降机构(10),设置于所述机柜(2)的内部用于负载化妆品粉饼并通过升降的方式将其传递到指定位置;吸取上料搬运机构(4),安装在所述机柜(2)的上部用于将载物升降机构(10)上的化妆品粉饼吸取搬运到下一道工序;5号并联机器人(5),安装在所述机台(1)的上部用于将化妆品粉饼搬运到指定位置;6号scara机器人(6),安装在所述机台(1)上用于将化妆品粉饼吸取搬运到化妆品粉盒中;所述机台(1)上还设置有粉饼传送装置(9)、缓冲料仓轨道(8)和多个视觉相机组件(7)。2.根据权利要求1所述的一种新型化妆品粉盒组合包装设备,其特征在于,所述载物升降机构(10)设有两个,且呈竖向平行设置,所述载物升降机构(10)包括升降装置(1001)和载物台(1002),所述载物台(1002)安装在所述升降装置(1001)上。3.根据权利要求1所述的一种新型化妆品粉盒组合包装设备,其特征在于,所述吸取上料搬运机构(4)包括设置于所述机柜(2)上的线轨(11)和导轨(13)、安装在线轨(11)和导轨(13)上的基座(15)、安装在基座(15)上的导轨(13)、线轨(11)和上料搬运组件(12),其中所述上料搬运组件(12)和安装在基座(15)上的导轨(13)和线轨(11)滑动连接,安装在机柜(2)上导轨(13)的一端以及安装在基座(15)上导轨(13)的两端都分别设置有限位件(14)。4.根据权利要求1所述的一种新型化妆品粉盒组合包装设备,其特征在于,所述粉饼传送装置(9)和其中一个所述载物升降机构(10)处于同一轴线上,所述粉饼传送装置(9)与所述缓冲料仓轨道(8)平行。5.根据权利要求4所述的一种新型化妆品粉盒组合包装设备,其特征在于,所述视觉相机组件(7)设有三个,其中有一个所述视觉相机组件(7)位于所述5号并联机器人(5)的旁边,并正对着所述粉饼传送装置(9),有一个位于所述缓冲料仓轨道(8)的上方,并正对着所述缓冲料仓轨道(8)的端部。6.根据权利要求4所述的一种新型化妆品粉盒组合包装设备,其特征在于,所述机台(1)的外侧还设置有粉盒传送台(3),所述粉盒传送台(3)与所述粉饼传送装置(9)和所述缓冲料仓轨道(8)垂直。7.根据权利要求6所述的一种新型化妆品粉盒组合包装设备,其特征在于,所述缓冲料仓轨道(8)的端部还设置有传感器(17),所述视觉相机组件(7)位于所述粉盒传送台(3)的上方,所述视觉相机组件(7)在所述粉盒传送台(3)上的投影和所述缓冲料仓轨道(8)处于同一直线上。8.根据权利要求1所述的一种新型化妆品粉盒组合包装设备,其特征在于,所述5号并联机器人(5)包括多方位移动组件(501)和安装在多方位移动组件(501)端部的旋转吸盘组件(16)。9.根据权利要求1所述的一种新型化妆品粉盒组合包装设备,其特征在于,所述6号scara机器人(6)包括移动机械臂(601)以及安装在移动机械臂(601)端部的旋转吸盘组件(16)。
技术总结
本实用新型公开了一种新型化妆品粉盒组合包装设备,包括机台和设置于机台外侧的机柜,所述机台上还设置有粉饼传送装置、缓冲料仓轨道和多个视觉相机组件,该设备还包括:载物升降机构,设置于所述机柜的内部用于负载化妆品粉饼并通过升降的方式将其传递到指定位置;吸取上料搬运机构,安装在所述机柜的上部用于将载物升降机构上的化妆品粉饼吸取搬运到下一道工序;5号并联机器人,安装在所述机台的上部用于将化妆品粉饼搬运到缓冲料仓轨道;6号Scara机器人,安装在所述机台上用于将粉饼从缓冲料仓轨道取出置入化妆品粉盒。本实用新型的有益效果是,自动化程度高,整套设备的包装操作完全不需要人工,可以极大提高工作效率,减少人工成本,因此具有很强的推广和应用价值。价值。价值。
技术研发人员:黄国哲
受保护的技术使用者:昆山骆比特机器人技术有限公司
技术研发日:2021.02.02
技术公布日:2021/10/26
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1