钩取组件、堆垛机的制作方法
1.本实用新型属于运送领域,主要涉及一种钩取组件、堆垛机。
背景技术:
2.堆垛机是立体仓库中的主要运输设备,是随立体仓库发展起来的专用机械设备,立体仓库堆垛机采用了电子计算机进行在库管理,实现立体库存储的自动化管理,不仅能使货物在仓库内按需自动存取,而且可以与仓库以外的生产环节进行有机的连接,并通过计算机管理系统和自动化物料搬运设备使仓库成为企业生产物流中的一个重要环节。企业外购件和自制生产件进入自动化仓库储存是整个生产的一个环节,短时存储是为了在指定的时间自动输出到下一道工序进行生产,从而形成一个自动化的物流系统,这是一种动态储存,也是当今自动化仓库发展的一个明显的技术趋势。
3.现有的,堆垛机由提升电机通过钢丝绳带动载货台做垂直升降运动,通过载货台上的货叉做伸缩运动取放货物;通过上述三维运动可将指定货位的货物取出或将货物送入指定货位。
4.由于现有的堆垛机中采用货叉伸缩进行取拿托盘或物料,不适合小件物料的储存。
技术实现要素:
5.本实用新型的目的在于:提供一种钩取组件、堆垛机,能够代替现有的伸缩货叉,仅需要将物料放置在托盘上,就可以实现货物的码放,尤其适合小型物料的码垛堆放。
6.为了实现上述目的,本实用新型采用的具体方案为:一种钩取组件,包括:支架、钩取驱动机构、钩取平移机构以及钩取机构;
7.钩取驱动机构设置在所述支架上,并与所述钩取机构连接,用于使所述钩取机构钩取用于放置物料的托盘的端部;
8.钩取平移机构与所述钩取机构连接,用于在所述钩取机构钩取所述托盘后驱动所述钩取机构平移以将所述托盘移动至下一环节;
9.钩取机构设置在所述钩取平移机构上,用于钩取放置物料的托盘端部。
10.所述钩取驱动机构,包括:
11.固定框架;
12.两根提升辊,对称设置在所述固定框架内;
13.提升电机,设置在所述固定框架上;
14.双排链轮,设置在所述提升电机的输出端;
15.链条,与所述双排链轮匹配设置;
16.两个被动链轮,分别设置在所述提升辊的一个端部,并于所述链条匹配设置;
17.轴承座,设置在所述提升辊靠近所述被动链轮一端的端部;
18.曲柄,设置在所述提升辊与所述支架之间。
19.所述钩取平移机构,包括:
20.连接框;
21.连接杆,设置在所述连接框与所述支架之间;
22.钩取平移导轨,设置在所述连接框上;
23.滑块,设置在所述钩取平移导轨上;
24.直线电机,设置在所述连接框上,用于驱动所述滑块沿所述钩取平移导轨平移。
25.所述钩取机构,包括:
26.钩取臂,与所述钩取平移机构连接;
27.钩取件,设置在所述钩取臂的端部,与所述托盘的端部边沿匹配设置。
28.一种堆垛机,包括:
29.框架;
30.升降组件,设置在所述框架上;
31.输送组件,设置在所述升降组件上,用于运送所述输送组件上的托盘;
32.如上所述的钩取组件,设置在所述升降组件上,位于所述输送组件的上方;
33.检测组件,设置在所述钩取组件与输送组件上,用于检测所述钩取件和托盘的位置。
34.所述升降组件,包括:
35.升降框架;
36.升降驱动电机,设置在所述升降框架上;
37.齿轮,设置在所述升降驱动电机的输出端;
38.齿条,设置在所述框架上;
39.所述齿轮与所述齿条匹配设置,用于驱动所述升降框架在所述框架上移动。
40.所述输送组件,包括:
41.输送框架
42.多根辊子,平行设置在所述输送框架内;
43.输送驱动电机,通过链轮链条结构与多根所述辊子,用于驱动所述辊子滚动以运送所述托盘。
44.所述检测组件,包括:
45.多个传感器,设置在所述输送框架上,用于采集所述托盘在所述输送组件上的位置信息;
46.控制单元,与所述传感器电性连接,用于采集所述传感器的信息,并根据所述信息控制所述钩取组件和输送组件的动作。
47.有益效果:本实用新型所述的钩取组件:通过设置在所述升降组件上的钩取组件,在所述托盘到位后,钩取或者顶推所述托盘的端部,将托盘运送到堆垛机上,或将托盘送到货架中。由于采用钩取组件取代了现有的货叉组件,节约空间,适合层高低的密集抽屉式储存,只需设置托盘的端部与所述钩取组件进行配合,使用钩取组件将托盘钩取移动即可。
48.本实用新型所述的堆垛机:通过托盘与所述堆垛机中的钩取组件配合,不再使用货叉伸缩的方式进行物料存储,能够应用于小物料存放托盘后的存储,方便生产。
49.本实用新型所述的堆垛机结构简单,使用方便,能够极大的提升堆垛的工作效率。
附图说明
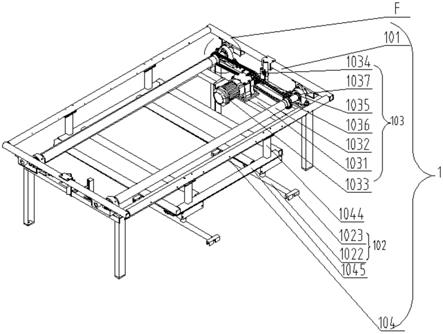
50.图1为钩取组件的立体图。
51.图2为图1中的f处放大图。
52.图3为本实用新型所述堆垛机的立体图。
53.图4为图3中的升降组件示意图。
54.图5为图1中输送组件和钩取组件的立体图。
55.图6为图5另一个角度的立体图。
56.图7为图6中的m处放大图。
57.图8为钩取组件位于高位时的示意图。
58.图9为检测组件结构框图。
59.图10为钩取件取货时的示意图。
60.图11为钩取件送货时的示意图。
61.图12为本实用新型所述检测组件的结构示意图。
62.图13为图12中的n处放大图。
63.图14为托盘的主视图。
64.图15为图14的左视图。
65.其中,图10,11中的箭头方向为托盘移动方向。
具体实施方式
66.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
67.如图1~2,本实用新型所述的钩取组件1,包括:支架101、钩取机构102、钩取驱动机构103、钩取平移机构104;其中,钩取机构102通过钩取平移机构104中的连接框1045与所述支架101连接;钩取驱动机构103设置在固定框架1031上,并与所述钩取平移机构104连接,用于使所述钩取机构102上下运动在端部钩取所述托盘6;钩取平移机构104设置在所述连接框1045上;用于钩取机构102钩取所述托盘6后驱动钩取机构102平移以将所述托盘6移动至下一环节,如烘箱或货架指定位置。
68.所述钩取机构102,包括:钩取臂1022、钩取件1023;钩取臂1022设置在钩取平移机构104的下方,安装在滑块1042上;通过所述钩取驱动机构103进行升降;通过钩取平移机构104平移;钩取件1023设置在所述钩取臂1022的端部,与所述托盘6的端部边沿匹配设置。
69.具体的,如图14~15,所述钩取件1023可以是倒u形结构,与托盘6的边沿匹配设置,以能够完成钩取作业为准。
70.优选的,托盘6可以为四周带有凸起的方形体。
71.所述钩取驱动机构103,包括:固定框架1031、两根提升辊1032、提升电机1033、双排链轮1034、两个被动链轮1036、轴承座1037以及曲柄1038;其中,两根提升辊1032对称设置在所述固定框架2031上;提升电机1033设置在所述固定框架2031上;双排链轮1034设置在所述提升电机1033的输出端;链条1035与所述双排链轮1034匹配设置;两个被动链轮1036分别设置在所述提升辊1032的一个端部,并与所述链条1035匹配设置,使钩取驱动机构103同时驱动两个被动链轮1036;提升辊1032两端设置有轴承座1037并安装在固定框架
2031上;曲柄1038设置在提升辊1032端部且在支架101下方;固定框架1031固定在升降组件的升降框架301上。
72.如图3~13,一种堆垛机,包括:框架2、升降组件3、输送组件4、检测组件5以及上述的钩取组件1;其中,升降组件3设置在所述框架2上;输送组件4设置在所述升降组件3上,用于运送所述输送组件4上的托盘6;所述检测组件5设置在所述钩取组件1上,用于检测所述托盘6的位置;钩取组件1设置在所述升降组件3上,位于所述输送组件4的上方,用于在所述托盘6到位后钩取所述托盘6的端部后并送至下一环节;其中,钩取组件1与托盘6的端部连接,直接将托盘6钩取,并进行移动等操作。
73.如图8为钩取件的初始位即曲柄1038转到最高位;在提升电机1033驱动提升辊1032转动的同时带动曲柄1038转动,带动支架101上下运动。支架101通过连接杆1044连接钩取机构102,从而使钩取机构102同样进行上下运动。在所述曲柄1038运行至如图5所示的低位时,钩取件1023倒u形结构扣住托盘6边缘,完成与托盘6端部的钩取动作。待钩取平移机构104将托盘6移动至下一环节后,提升电机1033反转,使钩取机构102向上运动,钩取件1023脱开托盘6。
74.所述钩取平移机构104,包括:钩取平移导轨1041、滑块1042、直线电机1043、连接杆1044以及连接框1045;连接杆1044设置在所述支架101与所述连接框1045之间;钩取平移导轨1041设置在连接框1045上;滑块1042设置在所述钩取平移导轨1041上,滑块上还装有所述的钩取件102;直线电机1043设置在所述连接框1045上,用于驱动所述滑块1042沿所述钩取平移导轨1041平移。
75.相应的,直线电机1043也可以采用齿轮齿条的方式进行取代,只要能完成驱动所述滑块1042沿所述钩取平移导轨1041平移的功能即可。
76.需要明确的是:如图9,所述提升电机1033、直线电机1043以及升降驱动电机302均与所述控制单元502电性连接,用于根据所述控制单元502的指令进行工作。
77.所述升降组件3,包括:升降框架301、升降驱动电机302、齿轮303、齿条304;其中,升降驱动电机302设置在所述升降框架301上;齿轮303设置在所述升降驱动电机302的输出端;齿条304设置在所述框架2上;所述齿轮303与所述齿条304匹配设置,用于驱动所述升降框架301在所述框架2上移动。
78.所述输送组件4,包括:输送框架401、多根辊子402以及输送驱动电机403;其中,多根辊子402平行设置在所述输送框架401内;输送驱动电机403通过链轮链条结构与多根所述辊子402连接,用于驱动所述辊子402滚动以运送所述托盘6。
79.所述检测组件5,如图12~13,包括:多个传感器501和控制单元502;其中,多个传感器501设置在所述输送框架402上,用于采集所述托盘6在所述输送组件4上的位置信息;控制单元502与所述传感器501电性连接,用于采集所述传感器501的信息,并根据所述信息控制所述钩取组件1的动作,和输送组件、升降组件的运行。
80.在所述传感器501采集到所述托盘6到达指定位置的信号后,发送信号至控制单元502;控制单元502采集信号后,发送控制指令至钩取组件1对托盘6进行钩取作业。
81.本实用新型的工作过程是:
82.输送组件4将托盘6水平运送,通过检测组件5检测其位置;当托盘6到达指定位置后,发送到位信号至控制单元502;控制单元502发送控制信号至钩取组件1,进行钩取作业;
83.钩取组件1在接收到控制单元502的指令后,通过钩取驱动机构103带动钩取机构102产生高低运动,从而与托盘6的端部连接,完成钩取动作;
84.在完成钩取动作后,通过控制单元502发送指令至钩取平移机构104和输送驱动电机403,通过钩取平移机构104和输送组件4将托盘6送入合适的位置;然后通过控制单元502发送指令至升降组件3,通过升降组件3将托盘6送至需要的高度。
85.具体的,取货过程是:所述控制单元502接收到取货指令后,确定待取货物的位置,堆垛机整体从进出口位置通过轨道等导向件运动至待取货物处;同时,通过升降驱动电机302驱动升降框架301到达待取货物的高度;当框架2到达指定位置后,控制单元502控制钩取平移机构104带动钩取机构102从初始位置,向待取货物移动;在移动过程中,控制单元502采集钩取机构102的位置;当到达托盘6的端部时,控制单元502通过指令控制提升电机1033,带动支架101向下运动,从而使钩取件1023钩住托盘6的端部;在钩取件1023钩住托盘6的端部后,如图10,控制单元502通过指令控制平移机构104工作,将托盘6向多根辊子402组成的输送机构运动;第一传感器5011感应到托盘信号后,表示托盘6开始进入输送组件4;控制单元502发送信号,使输送驱动电机403工作,多根辊子402组成的输送机构,将托盘6向输送组件4运送并逐渐离开货架;当到达第二传感器5012感应到托盘信号后,控制单元502发送信号至控制提升电机1033,进行脱钩,并使钩取机构102复位;托盘6继续由多根辊子402组成的输送机构运输直至第四传感器5014感应到信号后,控制单元502发送信号,使多根辊子402组成的输送机构停止工作;堆垛机从取货位置通过轨道等返回进出口位置,将货物送出。
86.所述控制单元502接收到存货指令后,确定待存货物的位置,堆垛机框架整体从进出口位置通过轨道等导向件运动直至存货位置;同时,通过升降驱动电机302驱动升降框架301到达待存货物的高度;当升降框架301到达指定位置后,多根辊子402组成的输送机构将托盘6向货架运送,托盘6离开第二传感器5012后,向控制单元502发送信号,控制单元502通过指令控制钩取平移机构104带动钩取机构102从初始位置,向托盘6移动;监测到信号后,钩取机构102下降,钩取件1023的端部抵住托盘6的端部,如图11;然后钩取平移机构104推动托盘6向货架移动并逐渐离开输送组件4;当托盘6接近第一传感器5011时,控制单元502发送信号,使输送驱动电机403停止工作;钩取平移机构104继续将托盘6运送到货架,托盘6到位后,控制单元502通过指令控制钩取平移机构102上升并复位;堆垛机从取货位置通过轨道等导向件运动返回进出口位置,完成存货过程。
87.当存取货物在另一侧是,堆垛机的动作与上面的一样,此时是第三传感器5013起作用,控制单元502根据第三传感器5013的信号通过指令控制钩取机构动作。
88.本公司应用了本实用新型所述的堆垛系统,用于对生产用物料的存储。原先散落在车间的零散分布的物料,占用车间较大面积。如果遇到物料过多的情况甚至会影响生产的顺利进行。在使用了本实用新型所述的堆垛系统后,将散落的物料进行空间分布,节省了大量的空间;即使遇到物料过多的情况也能从容应对。
89.同时,由于存放在托盘中的物料均为体积较小、重量不大的物体,如使用传统的货叉式的堆垛机,会导致空间浪费;而且货叉式的堆垛机结构复杂,成本较高。
90.在使用了本实用新型所述的堆垛系统后,由于采用了钩取的方式取货、送货,钩取组件结构简单,无需伸缩货叉,能够节省一定的空间和成本。
91.需要明确的是:传感器501的数量可以根据需要设置。
92.需要明确的是:所述输送组件4内还包括用于对托盘6进行导向的导向轮4a。
93.需要明确的是:本文所述的堆垛机行走机构可以采用轨道、导轮匹配的结构为现有技术,本文不再赘述。
94.以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易变化或替换,都属于本实用新型的保护范围之内。因此本实用新型的保护范围所述以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1