一种测温系统配合机器人的取放料装置的制作方法
1.本实用新型属于工业机器人技术领域,具体的说是一种测温系统配合机器人的取放料装置。
背景技术:
2.物料搬运机器人的取放料装置又称为机械手,它是机器人直接用于抓取和握紧的部件,它具有模仿人手动作的功能,并安装于机器人手臂的前端;由于被握工件的形状、尺寸、重量、材质及表面状态等不同,因此工业机器人末端操作器是多种多样的,大致可分为以下几类:夹钳式取料手、吸附式取料手、专用操作器及转换器仿生多指灵巧手,由于夹钳式取料手的机构简单,便于生产制造和后期修护等优点,在市场上具有较大的保有量。
3.现有技术中的机器人取放料装置由驱动机构提供动力,但是驱动机构难以对取放料装置的夹持力度进行精细的控制,导致损坏所夹持的物品,为此,本实用新型提供一种测温系统配合机器人的取放料装置。
技术实现要素:
4.为了弥补现有技术的不足,解决现有技术中的机器人取放料装置由驱动机构提供动力,但是驱动机构难以对取放料装置的夹持力度进行精细的控制,导致损坏所夹持的物品的问题,本实用新型提出的一种测温系统配合机器人的取放料装置。
5.本实用新型解决其技术问题所采用的技术方案是:本实用新型所述的一种测温系统配合机器人的取放料装置,包括壳体、传动机构、夹持臂和取放料机构;所述传动机构设置在壳体内部;所述夹持臂与传动机构固接;所述取放料机构设置在夹持臂底端侧壁上;
6.所述取放料机构包括支撑块和夹持吸盘;所述支撑块固接在夹持臂底端侧壁上,其内部开设有空腔;所述空腔内部滑动连接有t型杆;所述t型杆底端侧壁上固接有弹簧,其输出端伸至支撑块外部;所述夹持吸盘固接在t型杆输出端。
7.优选的,所述t型杆侧壁上套设固接有弧形板;所述弧形板内部开设有弧形槽;所述弧形槽内部滑动连接有两个支撑杆;两个所述支撑杆伸至弧形板外部;所述夹持吸盘侧壁上固接有固定块;所述固定块与t型杆输出端固接。
8.优选的,所述夹持吸盘侧壁上对称开设有开口;所述开口处设置有卡块;所述开口侧壁上安装有密封板;所述支撑杆与密封板侧壁固接;所述密封板端部呈u形,且远离卡块的侧壁为金属材料,靠近卡块的侧壁为橡胶材料。
9.优选的,所述传动机构包括传动轴、蜗杆、第一齿轮和第二齿轮;所述传动轴通过轴承转动连接在壳体顶端侧壁上,其顶部与外部动力源固接,且底部伸至壳体内部;所述蜗杆固接在传动轴底端;所述第一齿轮通过转轴转动连接在壳体内侧壁上;所述第二齿轮通过转轴转动连接在壳体内侧壁上。
10.优选的,所述第一齿轮与蜗杆啮合;所述第二齿轮与蜗杆啮合;所述第一齿轮与第二齿轮对称设置在蜗杆两侧;所述夹持臂设置有两个;两个所述夹持臂分别固接在转轴上,
且随转轴同轴转动。
11.优选的,所述夹持臂呈l型,其侧壁上设置有凸块;所述壳体内侧壁上转动连接有伸缩杆;所述伸缩杆底端铰接在凸块侧壁上。
12.优选的,所述壳体侧壁上对称设置有两个注油管;两个所述注油管的喷嘴分别与第一齿轮和第二齿轮对应。
13.优选的,两个所述注油管进油端由橡胶塞密封。
14.本实用新型的有益效果如下:
15.1.本实用新型所述的一种测温系统配合机器人的取放料装置,通过设置夹持臂、支撑块、t型杆、弹簧、夹持吸盘等结构,夹取产品时夹持吸盘配合弹簧使用,起到缓冲和卸力作用,避免了因夹持力度无法精细控制而损坏产品,且利用夹持吸盘进行固定,使得固定效果更好。
16.2.本实用新型所述的一种测温系统配合机器人的取放料装置,通过设置蜗杆、第一齿轮、第二齿轮、注油管等结构,传动机构的传动方式结构简单,传动效率高,通过注油管将润滑油喷洒至第一齿轮和第二齿轮上,从而对传动机构进行润滑和保养。
附图说明
17.下面结合附图对本实用新型作进一步说明。
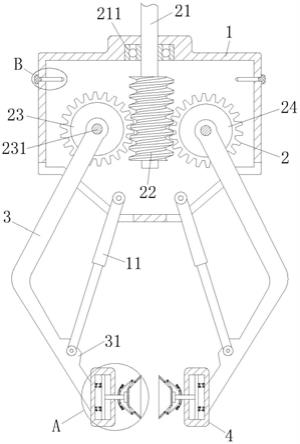
18.图1是本实用新型中的局部剖视图;
19.图2是图1中a处的局部放大图;
20.图3是图1中b处的局部放大图;
21.图4是图2中c处的局部放大图;
22.图中:1、壳体;11、伸缩杆;12、注油管;13、橡胶塞;2、传动机构;21、传动轴;211、轴承;22、蜗杆;23、第一齿轮;231、转轴;24、第二齿轮;3、夹持臂;31、凸块;4、取放料机构;41、支撑块;411、空腔;412、t型杆;413、弹簧;42、夹持吸盘;421、开口;422、卡块;423、密封板;43、弧形板;431、弧形槽;432、支撑杆;44、固定块。
具体实施方式
23.为了使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本实用新型。
24.如图1至图4所示,本实用新型所述的一种测温系统配合机器人的取放料装置,包括壳体1、传动机构2、夹持臂3和取放料机构4;所述传动机构2设置在壳体1内部;所述夹持臂3与传动机构2固接;所述取放料机构4设置在夹持臂3底端侧壁上;
25.所述取放料机构4包括支撑块41和夹持吸盘42;所述支撑块41固接在夹持臂3底端侧壁上,其内部开设有空腔411;所述空腔411内部滑动连接有t型杆412;所述t型杆412底端侧壁上固接有弹簧413,其输出端伸至支撑块41外部;所述夹持吸盘42固接在t型杆412输出端;工作时,将测温系统安装在本实用新型中所述的装置上,在机器人手臂的带动下,不停的在某个区域内移动并测量温度,当某个产品达到设定温度时,此时,外部动力源带动传动机构2运动,进一步带动夹持臂3工作,从而通过取放料机构4对产品进行夹取,通过夹持吸盘42将产品进行夹持;通过此方式,夹持吸盘42配合支撑块41对产品进行夹持,起到缓冲和
卸力的作用,避免了因夹持力度无法精细控制而导致损坏产品的缺陷。
26.作为本实用新型的一种实施方式,所述t型杆412侧壁上套设固接有弧形板43;所述弧形板43内部开设有弧形槽431;所述弧形槽431内部滑动连接有两个支撑杆432;两个所述支撑杆432伸至弧形板43外部;所述夹持吸盘42侧壁上固接有固定块44;所述固定块44与t型杆412输出端固接;作为本实用新型的一种实施方式,所述夹持吸盘42侧壁上对称开设有开口421;所述开口421处设置有卡块422;所述开口421侧壁上安装有密封板423;所述支撑杆432与密封板423侧壁固接;所述密封板423端部呈u形,且远离卡块422的侧壁为金属材料,靠近卡块422的侧壁为橡胶材料;工作时,夹持臂3带动支撑块41运动,当夹持吸盘42与产品侧壁接触时,夹持吸盘42四周不断扩大,其内部的气体通过两侧的开口421排出;当夹持吸盘42持续运动时,推动支撑杆432在弧形槽431内部滑动,相反的支撑杆432推动密封板423运动,使得卡块422卡进密封板423的u型端,并将夹持吸盘42进行密封,此时夹持吸盘42与产品侧壁贴合,并将其吸附固定;另一方面,t型杆412在支撑块41内部滑动,挤压弹簧413;通过此方式,夹取时起到缓冲作用,防止损坏产品外观,且利用夹持吸盘42进行固定,使得固定效果更好。
27.作为本实用新型的一种实施方式,所述传动机构2包括传动轴21、蜗杆22、第一齿轮23和第二齿轮24;所述传动轴21通过轴承211转动连接在壳体1顶端侧壁上,其顶部与外部动力源固接,且底部伸至壳体1内部;所述蜗杆22固接在传动轴21底端;所述第一齿轮23通过转轴231转动连接在壳体1内侧壁上;所述第二齿轮24通过转轴231转动连接在壳体1内侧壁上;作为本实用新型的一种实施方式,所述第一齿轮23与蜗杆22啮合;所述第二齿轮24与蜗杆22啮合;所述第一齿轮23与第二齿轮24对称设置在蜗杆22两侧;所述夹持臂3设置有两个;两个所述夹持臂3分别固接在转轴231上,且随转轴231同轴转动;工作时,外部动力源带动传动轴21转动,进一步带动蜗杆22转动,从而带动第一齿轮23和第二齿轮24转动,因两个夹持臂3固接在转轴231上,从而夹持臂3相对运动并带动取放料机构4进行夹持,此传动方式结构简单,传动效率高。
28.作为本实用新型的一种实施方式,所述夹持臂3呈l型,其侧壁上设置有凸块31;所述壳体1内侧壁上转动连接有伸缩杆11;所述伸缩杆11底端铰接在凸块31侧壁上;作为本实用新型的一种实施方式,所述壳体1侧壁上对称设置有两个注油管12;两个所述注油管12的喷嘴分别与第一齿轮23和第二齿轮24对应;作为本实用新型的一种实施方式,两个所述注油管12进油端由橡胶塞13密封;工作时,伸缩杆11起到支撑夹持臂3的作用;通过注油管12往壳体1内部注入润滑油,因注油管12的喷嘴与第一齿轮23和第二齿轮24对应,从而使得润滑油喷洒至第一齿轮23和第二齿轮24上,从而对传动机构2进行润滑和保养;橡胶塞13起到密封注油管12的作用。
29.工作原理:工作时,将测温系统安装在本实用新型中所述的装置上,在机器人手臂的带动下,不停的在某个区域内移动并测量温度,当某个产品达到设定温度时,此时,外部动力源带动传动机构2运动,进一步带动夹持臂3工作,从而通过取放料机构4对产品进行夹取,通过夹持吸盘42将产品进行夹持;通过此方式,夹持吸盘42配合支撑块41对产品进行夹持,起到缓冲和卸力的作用,避免了因夹持力度无法精细控制而导致损坏产品的缺陷;夹持臂3带动支撑块41运动,当夹持吸盘42与产品侧壁接触时,夹持吸盘42四周不断扩大,其内部的气体通过两侧的开口421排出;当夹持吸盘42持续运动时,推动支撑杆432在弧形槽431
内部滑动,相反的支撑杆432推动密封板423运动,使得卡块422卡进密封板423的u型端,并将夹持吸盘42进行密封,此时夹持吸盘42与产品侧壁贴合,并将其吸附固定;另一方面,t型杆412在支撑块41内部滑动,挤压弹簧413;通过此方式,夹取时起到缓冲作用,防止损坏产品外观,且利用夹持吸盘42进行固定,使得固定效果更好;外部动力源带动传动轴21转动,进一步带动蜗杆22转动,从而带动第一齿轮23和第二齿轮24转动,因两个夹持臂3固接在转轴231上,从而夹持臂3相对运动并带动取放料机构4进行夹持,此传动方式结构简单,传动效率高;伸缩杆11起到支撑夹持臂3的作用;通过注油管12往壳体1内部注入润滑油,因注油管12的喷嘴与第一齿轮23和第二齿轮24对应,从而使得润滑油喷洒至第一齿轮23和第二齿轮24上,从而对传动机构2进行润滑和保养;橡胶塞13起到密封注油管12的作用。
30.上述前、后、左、右、上、下均以说明书附图中的图1为基准,按照人物观察视角为标准,装置面对观察者的一面定义为前,观察者左侧定义为左,依次类推。
31.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型保护范围的限制。
32.以上显示和描述了本实用新型的基本原理、主要特征和优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1