一种多功能提手的制作方法
1.本技术涉及多功能提手的技术领域,尤其是涉及一种多功能提手。
背景技术:
2.保温桶在人们的生活中很常见,是一种使用十分频繁的器皿;既可以装冷的食品,也可以装热的食品,起到密封、保温的效果,一般保温桶的盖子通过螺纹的方式来连接,也有设计成扣耳的形式。
3.但是无论是常规的螺纹连接还是扣耳连接,在使用时开盖都不太方便。因此,本领域技术人员提供了一种多功能提手,以解决上述背景技术中提出的问题。
技术实现要素:
4.为了解决上述背景技术中提出的问题,本技术提供一种多功能提手。
5.本技术提供的一种多功能提手采用如下的技术方案:
6.一种多功能提手,包括桶体,以及装设于桶体顶口的帽盖,所述桶体的外壁在靠近顶口处固定安装有一对相互对称的第二环座,所述第二环座的内部装设有外把手,且第二环座和外把手的内部同时限位转动插接有第一插销,所述帽盖的外壁固定安装有一对相互对称的第一环座,所述第一环座的内部装设有内把手,且第一环座和内把手的内部同时限位转动插接有第二插销,所述外把手的内侧中心位置固定安装有铰片,所述内把手的外侧中心位置固定安装有铰座,所述铰座的内部限位转动插接有铰钉,所述铰钉活动穿设于铰片的内部,所述桶体与帽盖之间活动铰接有合页。
7.优选的,所述帽盖的外环壁在第一环座的下方固定安装有限位销,所述内把手的两端均开设有限位槽,所述限位销穿设于限位槽的内部。
8.优选的,所述限位槽设计成弧形结构,且限位槽与限位销之间活动连接。
9.优选的,所述铰片与外把手呈倾斜设置,且铰片的倾斜角度不超过四十五度。
10.优选的,所述外把手与内把手之间的铰接偏离外把手的中心线。
11.优选的,所述帽盖的内表面一体成型有卡接环座,所述卡接环座的外壁与桶体的顶口内壁均为梯形结构,且卡接环座与桶体顶口适配,所述卡接环座的内表面固定安装有保温盖。
12.综上所述,本技术包括以下有益技术效果:
13.当打开帽盖时,内把手与外把手之间利用铰片与铰座之间的配合,外把手放平而使帽盖翻开,并通过帽盖与桶体之间的合页连接,而当盖上帽盖与桶体时,内把手与外把手之间利用铰片与铰座之间的配合,外把手垂直于桶体的两侧,便于使用者手提,整个操作过程中通过转动内把手与外把手便可完成桶体的开盖或闭合,使用起来更加便捷。
附图说明
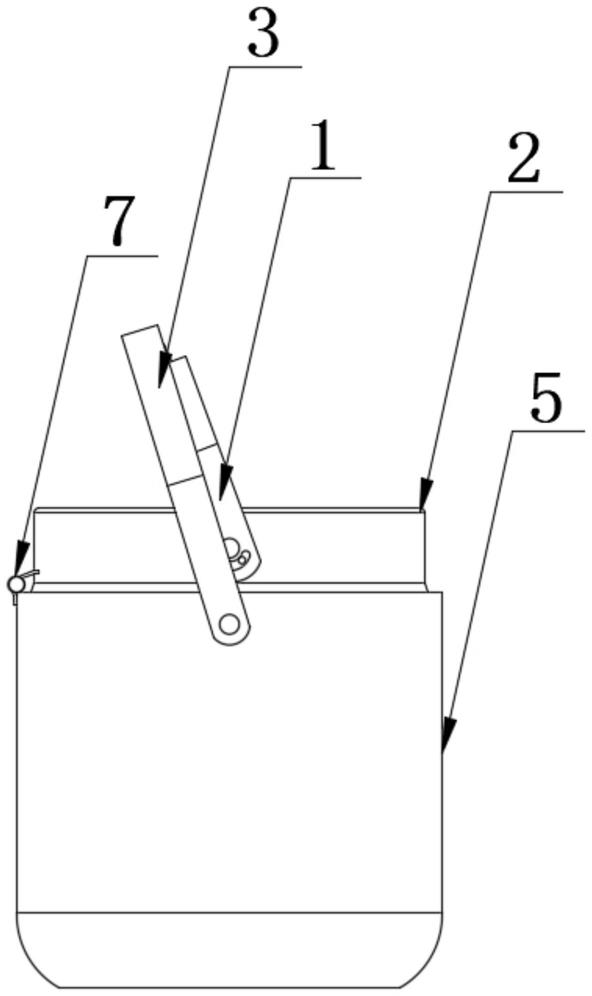
14.图1是本技术实施例中一种多功能提手的结构示意图;
15.图2是本技术实施例中一种多功能提手的侧视图;
16.图3是本技术实施例中一种多功能提手的侧视图;
17.图4是本技术实施例中内把手和外把手的结构示意图;
18.图5是本技术实施例中一种多功能提手的侧视图;
19.图6是本技术实施例中立体装配图;
20.图7是图2的自由度分析图;
21.图8是图3的自由度分析图;
22.图9是图5的自由度分析图。
23.附图标记说明:1、内把手;2、帽盖;3、外把手;4、卡接环座;5、桶体;6、保温盖;7、合页;8、第一插销;9、第二插销;10、限位槽;11、铰片;12、铰钉;13、铰座;14、第一环座;15、限位销;16、第二环座。
具体实施方式
24.以下结合附图1
‑
9对本技术作进一步详细说明。
25.本技术实施例公开一种多功能提手。参照图1
‑
9,一种多功能提手包括桶体5,以及装设于桶体5顶口的帽盖2,桶体5的外壁在靠近顶口处固定安装有一对相互对称的第二环座16,第二环座16的内部装设有外把手3,第二环座16和外把手3的内部同时限位转动插接有第一插销8,帽盖2的外壁固定安装有一对相互对称的第一环座14,第一环座14的内部装设有内把手1,第一环座14和内把手1的内部同时限位转动插接有第二插销9,帽盖2的外环壁在第一环座14的下方固定安装有限位销15,内把手1的两端均开设有限位槽10,限位销15穿设于限位槽10的内部,限位槽10设计成弧形结构,限位槽10与限位销15之间活动连接,外把手3的内侧中心位置固定安装有铰片11,铰片11与外把手3呈倾斜设置,铰片11的倾斜角度不超过四十五度,内把手1的外侧中心位置固定安装有铰座13,铰座13的内部限位转动插接有铰钉12,铰钉12活动穿设于铰片11的内部,外把手3与内把手1之间的铰接偏离外把手3的中心线,外把手3的铰片11与内把手1的铰座13倾斜铰接,而限位槽10与限位销15之间配合而改变形态,可使内把手1发生弹性形变,从而使帽盖2与桶体5锁紧或者打开,桶体5与帽盖2之间活动铰接有合页7,帽盖2的内表面一体成型有卡接环座4,卡接环座4的外壁与桶体5的顶口内壁均为梯形结构,卡接环座4与桶体5顶口适配,卡接环座4的内表面固定安装有保温盖6,当打开帽盖2时,内把手1与外把手3之间利用铰片11与铰座13之间的配合,外把手3放平而使帽盖2翻开,并通过帽盖2与桶体5之间的合页7连接,而当盖上帽盖2与桶体5时,内把手1与外把手3之间利用铰片11与铰座13之间的配合,外把手3垂直于桶体5的两侧,便于使用者手提,整个操作过程中通过转动内把手1与外把手3便可完成桶体5的开盖或闭合,使用起来更加便捷。
26.本技术实施例一种多功能提手的实施原理为:由机构原理分析可知,本设计是三个活动构件和四个转动副组成,以自由度计算公算可得整个机构的自由度为一:f=3n
‑
2p
l
‑
p
h
,f=3
×3‑2×
4=1;设定外把手3是构件a,内把手1是构件b,帽盖2是构件c,桶体5相当于固定构件,本机构有三种不同工作状态,第一临界状态(如图2和图7),此时构件c与桶体5之间刚好接触,构件c不能再往下转动,相当于构件c也是固定构件,只有构件a和构件b二个活动构件,三个转动副,自由度为零,不能再转动,构件c为压紧状态,由临界状态改变
时(如图5和图9),向右转动构件a到β角的位置,理论上是转不动的,因为自由度为零,但当构件b弹性变形,相当于构件b可以缩短时,构件a可以转到β角的位置,由于有焊在构件c上的限位销15档住,整个构件b被卡在在该位置,此时构件a处于垂直位置,构件b会稍偏于构件a的垂直位置,由受力分析可知,作用在构件a的力f在水平方向上有一个分力,可以防止构件a回转,构件c为完全打开状态(如图3和图8),由临界状态向左转动构件a到α角的位置,此时构件a与构件b刚好接触到,构件a和构件b相当一个刚体,在此位置,整个系统相当于只有二个活动构件,三个转动副,根据自由度计算公式,自由度为零,整个机构不能再转动,会卡在该位置,通过以上三种工作状态的分析可知,本设计是利用三杆机构工作的原理设计而成,当自由度不等于零件可以转动,当自由度等于零件不能转动,同时利用构件b的弹性变形来压紧构件c,利用限位销15定位功能来定位。
27.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1