一种收放线缆的多张力控制系统的制作方法
1.本实用新型属于收放线缆设备领域,具体涉及一种收放线缆的多张力控制系统。
背景技术:
2.在收放线缆的设备上,经常需要实现不同的收放张力值的设定。张力值的大小会影响设备的最终工作效果,过大的张力会使得线缆变形甚至断裂,过小的张力会使得线缆缠绕不紧。
3.传统的张力控制方式大多通过控制电机转速实现或者控制电机输出转矩实现,随着线缆卷筒直径变化,通过转速控制即需要通过直线线速度检测保持线速度恒定,通过转矩控制则需要控制电机输出力矩,使其自动跟随卷径变化,从而保持张力恒定。传统的控制方式需要设计复杂的控制电路,且频繁改变电机输出,容易引起系统不稳定。
4.因此,现在的技术不能很好到的控制不同段位的张力,或者张力控制方式比较复杂,成本高。
技术实现要素:
5.针对现有技术的不足,本实用新型改进了离合器的多挡位张力控制模式,实现了收放线缆设备可以运行在多张力模式下,在完全吸合模式时离合器最大张力输出,收放线缆设备处于回收工况,在完全脱开模式时,离合器最小张力输出,收放线缆设备处于自由轮释放模式,在离合器张力可调模式时,为收放线缆设备提供恒定且可调的张紧力。
6.为了实现上述目的,本实用新型采用如下技术方案:
7.一种收放线缆的多张力控制系统,包括:电机、离合器、卷筒轴系和模式切换开关;所述的电机通过离合器与用于收放线缆的卷筒轴系连接,所述的模式切换开关通过张力控制电路切换离合器的工作模式;
8.所述的工作模式包括完全吸合模式、滑动模式和完全松开模式;在完全吸合模式下,电机动力通过离合器完全传递至卷筒轴系;在滑动模式下,电机动力通过离合器部分传递至卷筒轴系;在完全松开模式下,电机动力不会传递至卷筒轴系。
9.本实用新型的有益效果是:通过本实用新型的多张力控制系统,利用多档位离合器可以实现不同张力的输出,通过开关切换可以实现不同的工作模式。在完全吸合档位可以实现设备的回收,在完全分离档位可以实现设备的“自由轮”状态,在张力调节的档位可以给绕线机提供稳定的张紧力,使绕线系统运行平稳,绕线紧凑整齐。本实用新型可以给收放设备提供稳定的张紧力,使收放线缆设备的绕线模式具有恒定的张紧力,使线绳在线筒上绕制紧密整齐,且三种工作模式切换方便,控制模式简单、成本低、方便维护、可靠性高。
附图说明
10.图1为本实用新型实施例中的收放线缆的多张力控制系统结构示意图;
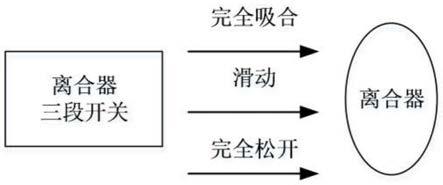
11.图2是本实用新型的离合器三种控制模式的示意图;
12.图3是本实用新型实施例中工作模式切换电路原理图;
13.图4是本实用新型实施例中的滑动模式下张力调节电路原理图;
14.图中:1
‑
模式切换开关,2
‑
卷筒轴系,3
‑
离合器,4
‑
链轮链条,5
‑
电机。
具体实施方式
15.下面结合附图对本实用新型做进一步的解释说明。
16.以下实施例将有助于本领域的技术人员进一步理解本实用新型,但不以任何形式限制本实用新型。应当指出的是,对本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变化和改进。这些都属于本实用新型的保护范围。
17.本实用新型提供了一种收放线的多张力控制模式,通过开关控制切换离合器的吸力,实现三种不同张力状态,一种是完全脱开的自由轮状态,使得收放线设备在放线时低阻力的自由转动,一种是完全吸合状态,在收放线设备回收过程中,实现卷筒轴系挂载到链轮链条传动轮系,使得主电机带动卷筒轮系转动回收线绳。第三种状态需要通过开关切换到分流回路,调整加载到离合器上的电流,达到调整张力输出的效果。用于收放线设备绕线时调节张力输出,有利于将线绳在线筒上绕制的整齐和紧密。
18.如图1所示,本实用新型实施例中的收放线缆的多张力控制系统主要包括电机5、离合器4、卷筒轴系2和模式切换开关1;所述的电机5通过离合器4与用于收放线缆的卷筒轴系2连接,所述的模式切换开关1通过张力控制电路切换离合器的工作模式;本实施例中,所述电机5的动力输出轴通过链轮链条4与离合器连接。
19.上述控制系统的结构还可以包括箱体、盘式刹车等部件,在不脱离本实用新型构思的前提下,还可以做出若干变化和改进,这些都属于本实用新型的保护范围。
20.如图2所示,所述的工作模式包括完全吸合模式、滑动模式和完全松开模式;在完全吸合模式下,电机动力通过离合器完全传递至卷筒轴系;在滑动模式下,电机动力通过离合器部分传递至卷筒轴系;在完全松开模式下,电机动力不会传递至卷筒轴系。
21.如图3所示的本实用新型实施例中工作模式切换电路原理图,张力控制电路包括控制器、两组常开常闭触点和一个辅助开关4
‑
c;
22.所述离合器4的两端分别连接两组常开常闭触点的公共端,其中左常开常闭触点的常开端连接电源正极和控制器,左常开常闭触点的常闭端通过辅助开关4
‑
c连接控制器的线圈正极端;右常开常闭触点的常开端连接控制器的线圈负极端,右常开常闭触点的常闭端连接电源负极和控制器;
23.所述控制器的线圈正极端和线圈负极端通过滑动电阻调节输出电流值;所述辅助开关4
‑
c的闭合或断开状态与右常开常闭触点的常开端同步。
24.电源正极和电源负极构成电源电压回路。本实施例中,电源电压回路的电源电压为24v。
25.线圈正极端和线圈负极端构成控制器电压回路,所述的滑动电阻串联在控制器电压回路中,通过调节滑动电阻的阻值能够改变控制器电压回路的电流值。本实施例中,控制器电压回路的控制器电压为5v。
26.结合图3和图4所示,上述多张力控制系统的收放线缆张力控制方法,主要控制离合器输出不同的张力,通过开关切换可以实现不同档位的切换,在完全吸合档位可以实现
设备的回收,在完全分离档位可以实现设备的“自由轮”状态,在张力调节的档位可以给绕线机提供稳定的张紧力,使绕线系统运行平稳,绕线紧凑整齐。
27.具体的控制方法包括:
28.当收放线缆设备需要回收线缆时,将模式切换开关1切换至左位,使得左常开常闭触点中的常开端闭合,常闭端断开;右常开常闭触点的常开端断开,常闭端闭合;辅助开关4
‑
c断开;此时,由电源正极
‑‑
左常开常闭触点中的常开端
‑‑
离合器
‑‑
右常开常闭触点的常闭端
‑‑
电源负极构成闭合回路,控制器vf5的9和10号针脚形成的电流调节回路断开,离合器仅由24v电源供电,离合器处于完全吸合模式;由电机5输出的动力通过离合器4完全传递至卷筒轴系,以最大张力回收线缆。
29.当收放线缆设备需要释放线缆时,将模式切换开关1切换至中位,使得左常开常闭触点中的常开端断开,常闭端闭合;右常开常闭触点的常开端断开,常闭端闭合;辅助开关4
‑
c断开;此时,离合器既没有24v电源供电,也没接通控制器vf5的电流调节回路,离合器两端无供电,离合器处于完全松开模式;电机动力不会传递至卷筒轴系,实现卷筒轴系低阻力自由转动释放线缆。
30.当收放线缆设备需要控制回收线缆的张紧力时,将模式切换开关1切换至右位,使得左常开常闭触点中的常开端断开,常闭端闭合;右常开常闭触点的常开端闭合,常闭端断开;辅助开关4
‑
c闭合;此时,由线圈正极端、辅助开关4
‑
c、离合器、右常开常闭触点的常开端、线圈负极端构成闭合回路,即控制器vf5的9和10号针脚的电流调节回路接通,离合器由控制器vf5的电流调节回路供电,离合器处于滑动模式下,电机动力通过离合器部分传递至卷筒轴系,通过控制器vf5的1和2号针脚的滑动电阻r2可以改变9和10号针脚输出的电流值(控制器电压回路的电流),即改变了加载在离合器两端的电流,使得离合器输出不同的吸力,从而改变卷筒轴系输出不同的张力值。
31.本实用新型中,离合器的模式开关形式不做限制,可以为三位开关,多档位按钮,多档位操作手柄等。用于控制模式切换开关动作的机构可以是plc、单片机或其他任何形式的控制模块。
32.通过上述的张力控制方法,收放线缆设备可以运行在多张力模式下,在完全吸合模式时离合器最大张力输出,收放线缆设备处于回收工况,在完全脱开模式时,离合器最小张力输出,收放线缆设备处于自由轮释放模式,在离合器张力可调模式时,为收放线缆设备提供恒定且可调的张紧力。本实用新型的控制方法简单、成本低、方便维护、可靠性高。
33.以上列举的仅是本实用新型的具体实施例。显然,本实用新型不限于以上实施例,还可以有许多变形。本领域的普通技术人员能从本实用新型公开的内容直接导出或联想到的所有变形,均应认为是本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1