一种微压缩垃圾车的制作方法
1.本实用新型属于环卫专用车技术领域,具体地,涉及一种微压缩垃圾车。
背景技术:
2.国内外垃圾压缩车现普遍使用填压器进行垃圾压缩,垃圾运输机的填压器主要包括刮板和推板,刮板将垃圾收刮入箱体,推板推动箱体内的垃圾在箱体内挤压,多次反复直至不能压缩。刮板、推板以及液压机构体积大、重量大,整体质量和体积利用系数低,垃圾压缩效率也较低。传统垃圾车不包括称重系统且料箱不能完全密封,垃圾运输过程中经常出现跑冒滴漏的现象,随着垃圾分类和运输要求的日益规范化,垃圾运输称重也显得格外重要。
技术实现要素:
3.本实用新型针对现有技术不足和缺陷,提供了一种微压缩垃圾车,该垃圾压缩车质量轻、压缩效率高、具有称重功能、料箱具有密封功能。
4.为实现上述目的,本实用新型提供一种微压缩垃圾车,包括摆动式垃圾压缩装置、投料口、上料装置、汽车底盘、料箱、举升装置、卸料口、称重系统。其特征在于:所述投料口布置在所述料箱前部上方,所述摆动式垃圾压缩装置水平布置对接在投料口下方,所述上料装置布置在所述投料口侧下方,所述料箱铰接在所述汽车底盘上方,所述举升装置两端分别与所述汽车底盘和所述料箱铰接形成运动副,所述称重系统与所述上料装置连接用于测量上料装置的上料重量,所述卸料口布置在料箱后部。通过所述上料装置将垃圾从投料口投入位于投料口下方的摆动式垃圾压缩装置,被摆动式垃圾压缩装置压缩的垃圾借助重力进入料箱,通过举伸装置升起料箱从卸料口进行卸料,所述称重系统测量并记录投料的对应数据。由于本实用新型提供一种微压缩垃圾车没有传统的填压器,其布置简单、降低车辆整体质量。
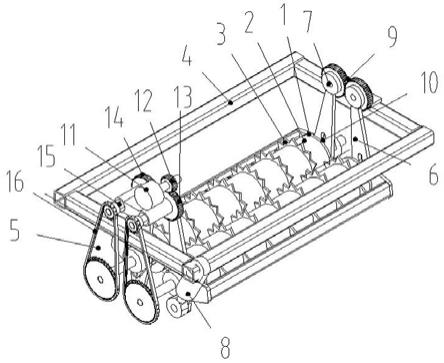
5.优选地,所述摆动式垃圾压缩装置上设置有旋转体构成的第一部分,其中,所述旋转体设置有轮廓构成的施力体,其中,所述轮廓由规则曲面构成,所述轮廓部分突出于所述旋转体的表面,所述轮廓按照预定形状突出于所述旋转体表面用于挤压物体造成物体内部晶粒形变,其中,所述晶粒形变包括滑移、孪生、扭折;所述一种摆动式垃圾压缩装置还包括固定架以及用于驱动所述第一部分旋转的驱动部件;所述一种摆动式垃圾压缩装置还包括摆动臂,所述摆动臂一端与第一部分转动连接,另一端与固定架连接;所述第一部分具有2个所述旋转体, 2个所述旋转体按旋转轴线平行方式布置;所述旋转体是异性偏心轴结构;所述摆动臂数量为4个,所述旋转体的两端通过2个所述摆动臂连接至所述固定架,所述每个旋转体均与所述摆动臂转动连接,所述2个旋转体之间设有间隙,所述2个旋转体转动方向相反;所述摆动臂设置有铰接部,所述摆动臂通过所述铰接部铰接于所述固定架以能沿所述固定架的宽度方向摆动;所述摆动式垃圾压缩装置还包括伸缩装置,所述伸缩装置是油缸,所述摆动臂通过所述伸缩装置连接至所述固定架形成运动副,所述伸缩装置伸缩时
控制所述摆动臂沿所述固定架的宽度方向摆动;所述相邻两个铰接部设置有齿轮副,所述伸缩装置伸缩时通过所述齿轮副形成传动同时控制4个所述摆动臂沿所述固定架的宽度方向摆动;所述摆动式垃圾压缩装置还包括用于测量所述旋转体转速的传感器,所述伸缩装置预设伸缩范围,所述伸缩装置还包括阀门或电机,所述传感器的信号输入控制系统控制所述伸缩装置的阀门开度和时间或电机供电频率和时间来调节所述伸缩装置的伸缩量;所述驱动部件包括马达、主动齿轮、第一从动齿轮、第二从动齿轮、传动轴、后传动,所述驱动部件包括2个所述传动轴和2个所述后传动,所述马达轴端连接主动齿轮,所述主动齿轮与所述第一从动齿轮啮合,所述第一从动齿轮与所述第二从动齿轮啮合,所述第一从动齿轮通过所述传动轴连接所述后传动,所述第二从动齿轮通过另一个所述传动轴连接另一个所述后传动,所述后传动是链传动、带传动、齿轮传动中的任意一种,所述两个传动轴分别通过两个所述后传动与两个所述旋转体形成传动;进入所述摆动式垃圾压缩装置的垃圾与被所述驱动部件驱动旋转的所述第一部分接触时,所述旋转体上突出的所述施力体对垃圾施加多方向作用力造成垃圾受力形变产生压缩;由于所述第一部分的循环旋转,垃圾被压缩之后迅速脱离所述摆动式垃圾压缩装置从而提高了垃圾压缩的进给量;按旋转轴线平行方式布置的2个所述旋转体上的施力体可以同时对垃圾进行施加多方向作用力,有助于提高垃圾压缩的压缩效果;由于所述旋转体的旋转轴线和所述旋转体本身的中心轴不重合,旋转时易产生振动,从而加剧受压垃圾的形变;由于偏心轴的质量分布离旋转轴较远,转动惯量更大,受压垃圾的受力也更大;由于所述旋转体通过单独的所述摆动臂与所述固定架连接,可以根据不同的垃圾种类预设不同的所述旋转体之间间隙;由于2个所述旋转体转动方向相反,与所述旋转体接触的垃圾受到所述旋转体的径向力方向一致,更有利于垃圾进入所述旋转体之间的间隙;通过伸缩装置控制所述摆动臂的摆动,可以调整所述旋转体之间间隙,避免较大较硬的垃圾卡死所述旋转体;由于相邻两个铰接部设置有齿轮副,所述相邻的摆动臂形成联动,齿轮副价格低廉而伸缩装置价格较高,因而减少所述伸缩装置的数量,可以降低成本;由于所述传感器测量所述旋转体的转速,较大较硬的垃圾造成所述旋转体旋转速度变化时通过控制系统对伸缩装置的对应调节来避免对系统造成伤害;通过马达、主动齿轮、第一从动齿轮、第二从动齿轮、传动轴、后传动的连接方式,1个马达同时驱动2个所述旋转体,减少了马达的数量;通过预设第一从动齿轮和第二从动齿轮的齿数可以对应调节2个所述旋转体的转速关系,通过预设所述后传动的传动比可以对应调节2个所述旋转体的扭矩,进而控制对垃圾的压缩能力和效率。
6.优选地,所述投料口设置有上密封门,所述上密封门与投料口壳体铰接,所述上密封门通过气缸或油缸与所述料箱连接形成运动副,所述气缸或油缸伸缩时控制所述上密封门沿所述气缸或油缸的长度方向摆动。所述投料口预设成上大下小的漏斗形状,所述投料口上边缘设置缓冲部,所述缓冲部由弹性材料制作而成,所述上密封门下侧设置有第一密封部,所述上密封门关闭时,所述第一密封部与所述投料口弹性贴合密封。由于所述上密封门设置有所述第一密封部能和所述投料口弹性密封,运输时可以避免垃圾从所述投料口泄漏;进入漏斗形状的投料口的垃圾利用自身重力可以更方便的汇集到所述摆动式垃圾压缩装置;由于所述投料口上边缘设置缓冲部,上料时避免了物料周转箱与所述投料口刚性的磕碰造成所述投料口损坏。
7.优选地,所述料箱是由钢板和型材拼焊而成中空的腔体,其中,所述钢板全部或部
分通过变形的方式加工成预设的形状,其中,所述变形是在低于材料再结晶温度下对材料施加外力使应力超过材料的弹性极限而引起材料内部晶粒位错增殖、位错密度增加、不同方向的位错发生交割、位错的运动受到阻碍,所述形状包括波形、双曲波形、肋形、 v形,所述形状平行均布在所述料箱表面。由于变形引起材料内部晶粒位错增殖,位错密度增加,不同方向的位错发生交割,位错的运动受到阻碍,使材料产生加工硬化,加工硬化能提高金属的硬度、强度和变形抗力;水平均布的形状使的料箱整体硬度、强度和变形抗力分布均匀,从而可以减少钢板厚度,降低料箱的重量,起到整体质量轻的效果。
8.优选地,所述卸料口设置有后密封门,所述后密封门与所述料箱壳体铰接,所述后密封门通过气缸或油缸与所述料箱连接形成运动副,所述气缸或油缸伸缩时控制所述后密封门沿所述气缸或油缸的长度方向摆动。所述后密封门下侧设置有第二密封部,所述后密封门关闭时,所述第二密封部与所述料箱弹性贴合密封。由于所述后密封门设置有所述第二密封部能和所述料箱弹性密封,运输时可以避免垃圾从所述投料口泄漏,卸料时通过气缸或油缸开启后密封门从卸料口进行卸料。
9.优选地,所述上料装置包括:位移器、引导器、滑动器、位移部,所述位移器设置有移动部和中空腔体,其中,所述中空腔体内的流体容积变化按线性规律对应所述移动部的位移量,所述引导器设置有轨迹,其中,所述轨迹由直线和曲线构成闭合线段,所述直线与所述曲线相切,所述轨迹突出于所述引导器表面,所述滑动器设置有沿所述引导器的轨迹内部移动的滑块,所述位移部设置有嵌入部,其中,所述嵌入部外形尺寸小于物料周转箱的预留嵌入口尺寸,所述位移器与所述滑动器连接, 所述滑动器的滑块与所述引导器的轨迹活动连接, 所述滑动器与所述位移部连接。由于所述中空腔体内的流体容积变化按线性规律对应所述移动部的位移量,所述位移器带动与其连接的所述滑动器在所述引导器的轨迹内有规律滑动,所述滑动器带动与其连接的位移部一起运动,所述位移部的嵌入部嵌入周转箱的嵌入口并带动周转箱运动。为防止所述滑动器运动卡滞,通过设置闭合相切线段构成的轨迹可以使滑动器的运动顺畅。
10.优选地,所述称重系统包括位置传感器、重量传感器、微程序控制器、显示器,所述位置传感器、所述重量传感器、所述显示器分别与所述控制器电气连接,所述重量传感器连接在所述位移器和所述滑动器的中间位置,所述位置传感器与所述位移部连接,所述位置传感器发射粒子波,其中,所述粒子波遭遇障碍返回所述位置传感器,所述位置传感器根据粒子波的传输生成模拟量通过电气连接传输至所述微程序控制器,所述显示器预设数字或文字显示,所述位置传感器和所述重量传感器与所述微程序控制器传递模拟量,其中,所述模拟量至少包括以下之一:信号的幅度、信号的频率、相位的变化,所述模拟量对应所述微程序控制器的预设的二进制代码指令,所述微程序控制器的指令寄存器预设操作码和地址码,所述微程序控制器的操作码译码器对所述操作码进行译码对应控制所述重量传感器的测量功能和所述显示器的显示功能,所述微程序控制器还包括发射器,所述发射器对应传递所述位置传感器和所述重量传感器的信号数据至配套的接受装置。通过上述设置,所述位置传感器发射粒子波遭遇预设障碍物时,粒子波的传输过程发生变化并传输给所述微程序控制器,所述微程序控制器触发指令传输给所述重量传感器完成信号采集并传输给所述微程序控制器,所述微程序控制器按照触发指令传输给所述显示器和所述发射器。
11.优选地,物料周转箱随所述位移部上升的同时,所述上密封门随动打开。通过上述
布置,操作人员无需单独对所述上密封门进行开启操作。
12.优选地,所述的一种微压缩垃圾车还包括用于表示车辆装载比例的显示装置,其中,所述显示装置包括若干个不同颜色或形状的指示灯、按键和显示屏;所述指示灯包括红色指示灯、黄色指示灯、绿色指示灯,所述显示屏包括用于显示当次物料周转箱内物料重量的第一显示屏、用于显示所述料箱内物料累加重量的第二显示屏,所述按键包括手动升降键、手动压缩键和具有一键操作功能的组合键,所述料箱内的物料量将通过所述显示装置上的用于表示重量的的指示灯给予提示,绿色指示灯亮时表示所述料箱的载重量小于85%,黄色指示灯亮时表示所述料箱的载重量在85
‑
95%之间,红色指示灯亮时表示所述料箱的载重量>95%。通过所述显示装置,可以给操作人员提供视觉提示,通过所述按键可以快捷操作所述垃圾压缩车。
附图说明
13.附图是用来提供对实用新型的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本实用新型,但并不构成对本实用新型的限制。
14.图1是本实用新型的摆动式垃圾压缩装置的结构示意图。
15.图2是本实用新型的垃圾压缩车结构示意图。
16.附图标记说明
[0017]1‑
第一部分,2
‑
旋转体,3
‑
施力体,4
‑
固定架,5
‑
驱动部件,6
‑
摆动臂,7
‑
铰接部,8
‑
伸缩装置,9
‑
齿轮副,10
‑
转速传感器,11
‑
马达,12
‑
主动齿轮,13
‑
第一从动齿轮,14
‑
第二从动齿轮,15
‑
传动轴,16
‑
后传动,100
‑
摆动式垃圾压缩装置,200
‑
投料口,300
‑
上料装置,400
‑
汽车底盘,500
‑
料箱,600
‑
举升装置,700
‑
卸料口,800
‑
称重系统,201
‑
密封门,202
‑
缓冲部,203
‑
第一密封部,301
‑
位移器,302
‑
引导器,303
‑
滑动器,304
‑
位移部,701
‑
后密封门,702
‑
第二密封部,801
‑
位置传感器,802
‑
重量传感器,803
‑
微程序控制器,804
‑
显示器。
具体实施方式
[0018]
以下结合附图对本实用新型的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本实用新型,并不用于限制本实用新型。
[0019]
为实现上述目的,本实用新型提供一种微压缩垃圾车,所述一种微压缩垃圾车包括摆动式垃圾压缩装置100、投料口200、上料装置300、汽车底盘400、料箱500、举升装置600、卸料口700、称重系统800。其特征在于:所述投料口布置在所述料箱前部上方,所述摆动式垃圾压缩装置水平布置对接在投料口下方,所述上料装置布置在所述投料口侧下方,所述料箱500铰接在所述汽车底盘400上方,所述举升装置600两端分别与所述汽车底盘400和所述料箱500铰接形成运动副,所述称重系统800与所述上料装置300连接用于测量上料装置300的上料重量,所述卸料口700布置在料箱500后部。
[0020]
优选地,所述摆动式垃圾压缩装置100上设置有旋转体2构成的第一部分1,其中,所述旋转体2设置有轮廓构成的施力体3,其中,所述轮廓包括以下至少之一:平面、规则曲面、不规则曲面,所述轮廓部分或全部突出于所述旋转体的表面,所述轮廓按照锯齿形状突出于所述旋转体表面用于挤压物体造成物体内部晶粒形变,其中,所述晶粒形变包括滑移、孪生、扭折;所述一种摆动式垃圾压缩装置还包括固定架4以及用于驱动所述第一部分1旋
转的驱动部件5;所述一种摆动式垃圾压缩装置还包括摆动臂6,所述摆动臂6一端与第一部分转动连接,另一端与固定架4连接。进入所述摆动式垃圾压缩装置的垃圾与被所述驱动部件5驱动旋转的所述第一部分1接触时,所述旋转体2上突出的所述施力体3对垃圾施加多方向作用力造成垃圾受力形变产生压缩;由于所述第一部分1的循环旋转,垃圾被压缩之后迅速脱离所述摆动式垃圾压缩装置从而提高了垃圾压缩的进给量;所述第一部分1具有2个所述旋转体, 2个所述旋转体按旋转轴线平行方式布置;按旋转轴线平行方式布置的2个所述旋转体上的施力体3可以同时对垃圾进行施加多方向作用力,有助于提高垃圾压缩的压缩效果;所述旋转体2是光轴偏心结构,由于所述旋转体2的旋转轴线和所述旋转体2本身的中心轴不重合,旋转时易产生振动,从而加剧受压垃圾的形变;由于光轴偏心结构的质量分布离旋转轴较远,转动惯量更大,受压垃圾的受力也更大;所述摆动臂6的数量为4个,所述旋转体的两端通过2个所述摆动臂连接至所述固定架4,所述每个旋转体2均与所述摆动臂6转动连接,所述2个旋转体2之间设有间隙,所述2个旋转体2转动方向相反。由于所述旋转体2通过单独的所述摆动臂6与所述固定架4连接,可以根据不同的垃圾种类预设不同的所述旋转体2之间间隙;由于2个所述旋转体2转动方向相反,与所述旋转体接触的垃圾受到所述旋转体2的径向力方向一致,更有利于垃圾进入所述旋转体之间的间隙;所述摆动臂6设置有铰接部7,所述摆动臂6通过所述铰接部7铰接于所述固定架4以能沿所述固定架4的宽度方向摆动;所述的一种摆动式垃圾压缩装置还包括伸缩装置8,所述伸缩装置8是油缸,所述摆动臂6通过所述伸缩装置8连接至所述固定架4形成运动副,所述伸缩装置8伸缩时控制所述摆动臂6沿所述固定架4的宽度方向摆动。通过伸缩装置8控制所述摆动臂6的摆动,可以调整所述旋转体2之间间隙,避免较大较硬的垃圾卡死所述旋转体2;所述相邻两个铰接部 7设置有齿轮副9,所述伸缩装置8伸缩时通过所述齿轮副9形成传动同时控制4个所述摆动臂6沿所述固定架4的宽度方向摆动;由于相邻两个铰接部7设置有齿轮副9,所述相邻的摆动臂6形成联动,齿轮副9价格低廉而伸缩装置8价格较高,因而减少所述伸缩装置8的数量,可以降低成本;所述的一种摆动式垃圾压缩装置还包括用于测量所述旋转体2转速的传感器10,所述伸缩装置8预设伸缩范围,所述伸缩装置8还包括阀门或电机,所述传感器10的信号输入控制系统控制所述伸缩装置8的阀门开度和时间或电机供电频率和时间来调节所述伸缩装置8的伸缩量;由于所述传感器10测量所述旋转体2的转速,较大较硬的垃圾造成所述旋转体2旋转速度变化时通过控制系统对伸缩装置8的对应调节来避免对系统造成伤害;所述驱动部件5包括马达11、主动齿轮12、第一从动齿轮13、第二从动齿轮14、传动轴15、后传动16,所述驱动部件5包括2个所述传动轴15和2个所述后传动16,所述马达11轴端连接主动齿轮12,所述主动齿轮12与所述第一从动齿轮13啮合,所述第一从动齿轮13与所述第二从动齿轮14啮合,所述第一从动齿轮13通过所述传动轴15连接所述后传动16,所述第二从动齿轮14通过另一个所述传动轴15连接另一个所述后传动16,所述后传动16是链传动、带传动、齿轮传动中的任意一种,所述两个传动轴15分别通过两个所述后传动16与两个所述旋转体2形成传动;通过上述驱动部件的连接方式,1个马达11同时驱动2个所述旋转体2,减少了马达11的数量;通过预设第一从动齿轮13和第二从动齿轮14的齿数可以对应调节2个所述旋转体2的转速关系,通过预设所述后传动16的传动比可以对应调节2个所述旋转体2的扭矩,进而控制对垃圾的压缩能力和效率。
[0021]
优选地,所述投料口200设置有上密封门201,所述上密封门201与投料口200壳体
铰接,所述上密封门201通过油缸与所述料箱连接形成运动副,所述气缸或油缸伸缩时控制所述上密封门201沿所述气缸或油缸的长度方向摆动。所述投料口预设成上大下小的漏斗形状,所述投料口上边缘设置缓冲部202,所述缓冲部202由弹性材料制作而成,所述上密封门201下侧设置有第一密封部203,所述上密封门201关闭时,所述第一密封部203与所述投料口200弹性贴合密封。
[0022]
优选地,所述料箱500是由钢板和型材拼焊而成中空的腔体,其中,所述钢板全部或部分通过变形的方式加工成预设的形状,其中,所述变形是在低于材料再结晶温度下对材料施加外力使应力超过材料的弹性极限而引起材料内部晶粒位错增殖、位错密度增加、不同方向的位错发生交割、位错的运动受到阻碍,所述形状是梯形,所述形状平行均布在所述料箱表面。
[0023]
优选地,所述卸料口700设置有后密封门701,所述后密封门701与所述料箱500壳体铰接,所述后密封门701通过油缸与所述料箱500连接形成运动副,所述油缸伸缩时控制所述后密封门701沿所述油缸的长度方向摆动。所述后密封门701下侧设置有第二密封部702,所述后密封门701关闭时,所述第二密封部702与所述料箱500弹性贴合密封。
[0024]
优选地,所述上料装置300包括:位移器301、引导器302、滑动器303、位移部304,所述位移器301设置有移动部和中空腔体,其中,所述中空腔体内的流体容积变化按线性规律对应所述移动部的位移量,所述引导器302设置有轨迹,其中,所述轨迹由直线和曲线构成闭合线段,所述直线与所述曲线相切,所述轨迹突出于所述引导器302表面,所述滑动器303设置有沿所述所述引导器302的轨迹内部移动的滑块,所述位移部304设置有嵌入部,其中,所述嵌入部外形尺寸小于物料周转箱的预留嵌入口尺寸,所述位移器301与所述滑动器303连接, 所述滑动器303的滑块与所述引导器302的轨迹活动连接, 所述滑动器303与所述位移部304连接。
[0025]
优选地,所述称重系统800包括位置传感器801、重量传感器802、微程序控制器803、显示器804,所述位置传感器801、所述重量传感器802、所述显示器804分别与所述控制器803电气连接,所述重量传感器802连接在所述位移器301和所述滑动器303的中间位置,所述位置传感器801与所述位移部304连接,所述位置传感器801发射粒子波,其中,所述粒子波遭遇障碍返回所述位置传感器801,所述位置传感器801根据粒子波的传输生成模拟量通过电气连接传输至所述微程序控制器803,所述显示器804预设数字或文字显示,所述位置传感器801和所述重量传感器802与所述微程序控制器803传递模拟量,其中,所述模拟量至少包括以下之一:信号的幅度、信号的频率、相位的变化,所述模拟量对应所述微程序控制器803的预设的二进制代码指令,所述微程序控制器803的指令寄存器预设操作码和地址码,所述微程序控制器803的操作码译码器对所述操作码进行译码对应控制所述重量传感器802的测量功能和所述显示器804的显示功能,所述微程序控制器803还包括发射器,所述发射器对应传递所述位置传感器801和所述重量传感器802的信号数据至配套的接受装置。
[0026]
优选地,物料周转箱随所述位移部304上升的同时,所述上密封门201随动打开。通过上述布置,操作人员无需单独对所述上密封门201进行开启操作。
[0027]
优选地,所述的一种微压缩垃圾车还包括用于表示车辆装载比例的显示装置,其中,所述显示装置包括3个不同颜色的指示灯、3个按键和2个显示屏;所述指示灯包括红色指示灯、黄色指示灯、绿色指示灯,所述显示屏包括用于显示当次物料周转箱内物料重量的
第一显示屏、用于显示所述料箱500内物料累加重量的第二显示屏,所述按键包括手动升降键、手动压缩键和具有一键操作功能的组合键,所述料箱500内的物料量将通过所述显示装置上的用于表示重量的的指示灯给予提示,绿色指示灯亮时表示所述料箱500的载重量小于85%,黄色指示灯亮时表示所述料箱500的载重量在85
‑
95%之间,红色指示灯亮时表示所述料箱500的载重量>95%。通过所述显示装置,可以给操作人员提供视觉显示和提示,便于操作人员执行相应的工作步骤,通过所述按键可以一键操作所述垃圾压缩车的预设功能。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1