一种扶梯控制装置及扶梯、自动人行道的制作方法
1.本发明属于扶梯控制技术领域,具体涉及一种扶梯控制装置及扶梯、自动人行道。
背景技术:
2.自动扶梯和自动人行道是公共场所运送乘客的典型设备。由于其在单位时间内运送乘客的效率比垂直电梯高出很多,自动扶梯已经越来越多在商场、机场、高铁站、地铁、宾馆等场所广泛地运用。
3.一般情况下,在扶梯正常速度运行,不断有乘客使用时,不管乘客的行进速度怎样,扶梯的速度是不变的。对于行动不便的乘客(如老人或残疾人),这就有一定的风险造成乘客摔倒。现有技术下,通常采用以下方式解决上述技术问题:1、针对乘客跌到后再进行判断,如通过加装摄像头进行视觉识别,只能在危险情况发生后再做出反应处理;2、把正常运行速度一直设置在较低速度运行,为了迁就行动不便的乘客,而大大降低运输乘客的效率。
技术实现要素:
4.为了克服上述技术缺陷,本实用新型第一个方面提供了一种扶梯控制装置,其能适应乘客的进入速度。
5.本实用新型是通过以下技术方案实现的:
6.一种扶梯控制装置,包括:
7.乘客信息获取模块,安装在扶梯出入口梳齿支撑板两侧的裙板上,用于获取乘客进入运行中楼梯信息和乘客客流量信息;
8.压力获取模块,安装在扶梯出入口的多块前沿板上,用于获取乘客的数量信息;
9.乘客速度信息获取模块,安装在扶梯出入口扶手带入口的下方,用于获取乘客进入扶梯的速度和离开扶梯的速度;
10.控制器,与所述乘客信息获取模块、所述压力获取模块以及所述乘客速度信息获取模块连接,用于根据所述乘客进入运行中楼梯信息、所述乘客客流量信息、所述乘客的数量信息、乘客进入扶梯的速度和离开扶梯的速度控制扶梯的运行速度。
11.作为本实用新型的进一步改进,所述乘客信息获取模块为对射光电开关。
12.作为本实用新型的进一步改进,所述压力获取模块为压力传感器
13.作为本实用新型的进一步改进,所述乘客速度信息获取模块为微波传感器。
14.作为本实用新型的进一步改进,本实用新型还包括:物联网模块,用于接收由机器人发出的进入信息或者离开信息,所述控制器还与所述物联网模块连接,用于根据所述进入信息、所述离开信息和所述进入运行中楼梯信息控制扶梯的运行速度。
15.本实用新型的第二个方面,提供了一种扶梯,包括上述的扶梯控制器。
16.本实用新型的第三个方面,提供了一种自动人行道,包括上述的扶梯控制器。
17.与现有技术相比,本发明具有以下有益效果:本实用新型通过增设乘客信息获取模块、压力获取模块和乘客速度信息获取模块,能实时获取乘客进入扶梯时的多种信息,为
控制器的控制提供精准的信息,进而实现更精准的控制,为扶梯速度的控制提供了硬件条件。
附图说明
18.下面结合附图对本发明的具体实施方式作进一步详细的说明,其中:
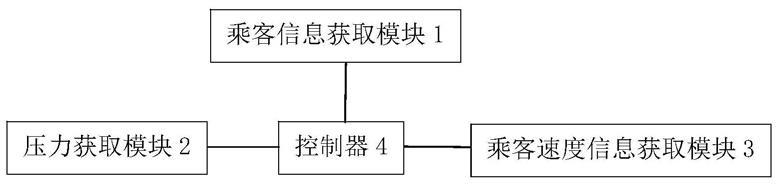
19.图1为实施例1所述扶梯控制装置的整体结构示意图;
20.图2为实施例1所述扶梯控制装置的局部安装示意图;
21.图3为实施例1所述扶梯控制装置的另一局部安装示意图;
22.图4为实施例2所述扶梯控制装置的整体结构示意图。
23.标记说明:1、乘客信息获取模块;11、对射光电开关;2、压力获取模块;21、压力传感器;3、乘客速度信息获取模块;31、微波传感器;4、控制器;5、物联网模块。
具体实施方式
24.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
25.实施例1
26.本实施例公开了一种扶梯控制装置,如体1
‑
图3所示,包括:乘客信息获取模块1、压力获取模块2、乘客速度信息获取模块3和控制器4,其中,乘客信息获取模块1安装在扶梯出入口梳齿支撑板两侧的裙板上,用于获取乘客进入运行中楼梯信息和乘客客流量信息;压力获取模块2安装在扶梯出入口的多块前沿板上,用于获取乘客的数量信息;乘客速度信息获取模块3安装在扶梯出入口扶手带入口的下方,用于获取乘客进入扶梯的速度和离开扶梯的速度;控制器4与乘客信息获取模块1、压力获取模块2以及乘客速度信息获取模块3连接,用于根据乘客进入运行中楼梯信息、乘客客流量信息、乘客的数量信息、乘客进入扶梯的速度和离开扶梯的速度控制扶梯的运行速度。
27.作为优选,乘客信息获取模块1可采用对射光电开关11,压力获取模块2可采用压力传感器21,乘客速度信息获取模块3为微波传感器31。
28.接下来结合具体实施过程对本实施例做进一步解释,如图4所示,如下:
29.单独的行动不便的老年人或者残疾人进入扶梯。此时,安装于入口的对射光电开关11没有检测到有乘客进入(考虑一般有行动不变的乘客,其他乘客会先让其通行),扶梯入口多块前沿板上的压力传感器21检测到约一个或多个乘客的重量(一般考虑一个成年人平均重量约60kg,该重量可通过扶梯控制器4参数设定在40kg到90kg之间),微波传感器31检测到行进缓慢的行动不便乘客,三组电信号传输到控制器4,控制器4得到此时只有单独的行动不变的乘客的信息,把运行速度调整到比乘客行进速度更低的速度v3,乘客可缓慢进入运行中的扶梯,摔倒风险大大地降低。当乘客经过对射光电开关11,控制器4获取乘客已进入运行中的梯级信息,并经过一定的延时后(此段延时时间目的是让乘客调整站立的位置,扶稳扶手带,可通过控制器4参数设置,一般是乘客经过扶梯靠近入口水平段的时间),加速到快速速度v1运行,提高运输效率。因每台扶梯提升高度固定,控制器4可计算出乘客,以快速速度v1经过扶梯倾斜段所用时间。经过此时间后,乘客到达扶梯出口水平段。控制器4参考乘客进入的速度,减速至比乘客行进速度更低的速度v3,使乘客可以平稳走出
扶梯,实施例中具体的计算、控制方法请参见现有技术。
30.扶梯入口和出口都处于拥挤状态。此时扶梯的入口和出口前沿板上的压力传感器21检测到多名乘客的重量,出入口对射光电开关11不断被遮挡触发,微波传感器31检测到扶梯入口和出口的乘客进入和退出都很缓慢,说明此时多名乘客进入扶梯,出口的乘客也不能快速疏导。为避免扶梯出口处人流过于拥挤,造成踩踏事故,控制器4在接收到上述三组信号后,将调整扶梯运行速度,自动降速进入慢速速度v2,主动降低扶梯运输效率,以规避扶梯出入口人群拥挤的情况。待拥挤情况缓解,盖板压力传感器21检测到乘客的重量减少,微波传感器31检测到乘客的行进速度加快时,控制器4再把运行速度调整回快速速度v1,疏导乘客。
31.通过上述技术方案的设置,能更关注乘客的实时状态,预防事故的发生,为智能扶梯的实行提供硬件条件。
32.实施例2
33.本实施例提供了另一种扶梯控制装置,其与实施例1的区别在于,如图5所示,本实施例还包括:物联网模块5,其用于接收由机器人发出的进入信息或者离开信息,控制器4还与物联网模块5连接,用于根据进入信息、离开信息和进入运行中楼梯信息控制扶梯的运行速度。
34.单独的无接触送货机器人进入扶梯。在进入扶梯前,无接触送货机器人先通过物联网模块5,连接无线网络,发送进入信息给到扶梯物联网模块5。控制器4接收到机器人发出的进入信息后,开始减慢运行速度。达到指定的慢速速度v2后,控制器4亦通过物联网模块5反馈信号给到机器人,指示机器人以与扶梯慢速速度v2一样的速度进入扶梯。此时对射光电开关11检测到机器人,控制器4认为机器人已进入运行中的梯级,并开始计算机器人在扶梯上的位置。在扶梯水平段,扫描梯级黄色边(黄色边是每个梯级都有的边界线),调整自身前后位置,以确认固定站立的位置在一个梯级上而不会摔倒(若站立在两个梯级之间,梯级运行到倾斜段时,机器人便会因梯级高低落差而摔倒)。机器人调整位置完毕,再发送信号给扶梯控制器4确认。控制器4使扶梯加速至快速速度v1运行,提高运输效率。因每台扶梯提升高度固定,控制器4可计算出机器人,以快速速度v1经过扶梯倾斜段所用时间。经过此时间后,机器人到达扶梯出口水平段,扶梯减速至慢速速度v2,并反馈离开信息给到机器人,提示机器人运行走出扶梯。实施例中具体的计算、控制方法请参见现有技术。
35.通过上述技术方案,可与智能机器人通讯交互,为增加扶梯功能提供有利的硬件条件,使得扶梯能够服务更多楼层的客户。
36.实施例3
37.本实施例公开了一种扶梯,其特征在于,包括实施例1或者实施例2中的扶梯控制装置,本实施例的具体实施过程请参见实施例1,在此不再一一赘述。
38.实施例4
39.本实施例公开了一种自动人行道,包括实施例1或者实施例2中的扶梯控制装置,本实施例的具体实施过程请参见实施例1,在此不再一一赘述。
40.以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,故凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1