一种柔性模具吊具抓手的制作方法
1.本实用新型属于吊具抓手技术领域,具体涉及一种柔性模具吊具抓手。
背景技术:
2.模具是工业生产上用以注塑、吹塑、挤出、压铸或锻压成型、冶炼、冲压等方法得到所需产品的各种模子和工具。在实际生产中,需要将模具安装到特定的设备上,对于小的模具可以通过人工搬运,但对于大模具,通过人工搬运,劳动强度较大,且搬运过程中易造成模具的损坏,进而会加大生产成本。
3.大型模具的吊装通常采用钢丝绳加吊钩的方式,这种方式结构简单,成本比较低,但是操作繁琐,效率低下。采用自动化的吊具来吊装就解决了这个问题,自动化的吊具有四个钢结构的抓手,能根据系统信号,准确定位到模具位置,但是因为模具四个起吊位置并不一定会在同一水平面,所以起吊时四个抓手只有三个受力,造成受力偏载,增大模具损坏的风险,且无法准确的放置模具的位置。
技术实现要素:
4.本实用新型的目的是克服现有技术中存在的因所吊取模具的四个起吊位置不在同一水平面,引起的受力偏载的缺陷,提供了一种一端为固定抓手、另一端为活动抓手有效避免在起吊过程中引起的偏载现象的柔性模具吊具抓手。
5.本实用新型解决其技术问题所采用的技术方案是:
6.一种柔性模具吊具抓手,包括通过上部支架与吊具本体连接的抓手组件;所述抓手组件包括通过抓手安装架与所述上部支架连接的固定手抓装置和摆动手抓装置;所述摆动手抓装置包括固定安装在所述抓手安装架内侧的第一抓手连接板、固定安装在所述抓手安装架外侧的第二抓手连接板以及通过转动轴转动连接在所述第一抓手连接板和第二抓手连接板上的摆动抓手机构;所述摆动抓手机构与所述第一连接板之间设置有复位弹簧装置。
7.进一步地,所述摆动抓手机构包括与所述转动轴转动连接的摆动抓手机架和安装在所述摆动抓手机架上的第一摆动手抓和第二摆动手抓;所述第一摆动手抓和所述第二摆动手抓在所述摆动抓手机架上相对滑动。
8.进一步地,所述复位弹簧装置包括固定在所述摆动抓手机架上的弹簧架、固定在所述弹簧架上端的导向柱以及一端套设在所述导向柱上另一端卡设在所述第一抓手连接板上的复位弹簧。
9.进一步地,所述摆动抓手机架上安装有至少两个安装吊耳。
10.进一步地,所述固定手抓装置包括相对固定设置在所述抓手安装架上的第三抓手连接板、固定在两所述第三抓手连接板上的固定抓手机构。
11.进一步地,所述第一抓手连接板的两端均开设有u型槽,所述第一抓手连接板的两端均固定安装有用于卡设所述复位弹簧的卡块。
12.更进一步地,所述固定抓手机构和所述摆动抓手机构上均设置有防护罩。
13.本实用新型的一种柔性模具吊具抓手的有益效果是:
14.1、本实用新型的抓手采用一端采用固定手抓装置,一端采用摆动手抓装置,能够适用在起吊大型模具时,四个起吊位置不在同一水平面的情况,能够准确地抓起模具的四个位置,有效的避免了在起吊过程中因四个抓手只有三个受力,造成受力偏载的情况。
15.2、本实用新型的摆动手抓装置上安装有复位弹簧装置,在吊取模具时,摆动手抓装置根据模具的形状,调节摆动手抓装置的摆动角度,当吊取后,复位弹簧装置将摆动手抓装置复位,方便进行下一次起吊,同时复位弹簧装置起到减震作用,避免摆动手抓装置在复位后摆动幅度过大。
附图说明
16.下面结合附图和具体实施方式对本实用新型作进一步详细的说明。
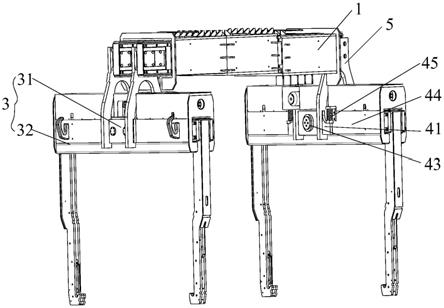
17.图1是本实用新型实施例的吊具抓手的立体图;
18.图2是本实用新型实施例的摆动抓手装置的第一视角立体图;
19.图3是本实用新型实施例的摆动抓手装置的第二视角立体图
20.图4是本实用新型实施例的固定抓手装置的立体图;
21.图5是本实用新型实施例的复位弹簧装置的细节图;
22.图6是本实用新型实施例的弹簧架的安装示意图。
23.图中:1、上部支架,2、吊具本体,3、固定手抓装置,31、第三抓手连接板,32、固定抓手机构,33、固定轴,34、固定手抓,4、摆动手抓装置,41、第一抓手连接板,42、第二抓手连接板,43、转动轴,44、摆动抓手机构,445、第一摆动手抓, 446、第二摆动手抓,447、吊耳,45、复位弹簧装置,451、弹簧架,452、导向柱,453,复位弹簧,454、卡块,5、抓手安装架,6、防护罩。
具体实施方式
24.现在结合附图对本实用新型作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本实用新型的基本结构,因此其仅显示与本实用新型有关的构成。
25.如图1
‑
图6所示的本实用新型的一种柔性模具吊具抓手的具体实施例,包括通过上部支架1与吊具本体2连接的抓手组件;抓手组件包括通过抓手安装架5与上部支架1连接的固定手抓装置3和摆动手抓装置4;摆动手抓装置4包括固定安装在抓手安装架5内侧的第一抓手连接板41、固定安装在抓手安装架5外侧的第二抓手连接板42以及通过转动轴43转动连接在第一抓手连接板41和第二抓手连接板42上的摆动抓手机构44;摆动抓手机构44与第一抓手连接板41之间设置有复位弹簧装置45。本实用新型的抓手采用一端采用固定手抓装置3,一端采用摆动手抓装置4,能够适用在起吊大型模具时,四个起吊位置不在同一水平面的情况,能够准确地抓起模具的四个位置,有效的避免了在起吊过程中因四个抓手只有三个受力,造成受力偏载的情况。
26.参照图3和图4,本实用新型实施例中摆动抓手机构44包括与转动轴43转动连接的摆动抓手机架441和安装在摆动抓手机架441上的第一摆动手抓445和第二摆动手抓446;第一摆动手抓445和第二摆动手抓446在摆动抓手机架441上相对滑动。有动力装置带动第一
摆动手抓445和第二摆动手抓446 在摆动抓手机架441上滑动,以适用不同大小的模具的起吊,动力装置为现有技术,在此不做累述。固定抓手机构32和摆动抓手机构44的结构完全一样,在本专利中不再做详细阐述,其中摆动抓手机架441和固定抓手机构32的固定抓手机架的外侧均安装有至少两个安装吊耳447,方便摆动抓手机构 44和固定抓手机构32的安装。
27.参照图5和图6,复位弹簧装置45包括固定在摆动抓手机架441上的弹簧架451、固定在弹簧架451上端的导向柱452以及一端套设在导向柱452上另一端卡设在第一抓手连接板41上的复位弹簧453。第一抓手连接板41的两端均开设有u型槽,第一抓手连接板41的两端均固定安装有用于卡设复位弹簧453 的卡块454。本实用新型的摆动手抓装置4上安装有复位弹簧装置45,在吊取模具时,摆动手抓装置4根据模具的形状,调节摆动手抓装置4的摆动角度,当吊取后,复位弹簧装置45将摆动手抓装置4复位,方便进行下一次起吊,同时复位弹簧装置 45起到减震作用,避免摆动手抓装置4在复位后摆动幅度过大。
28.本实用新型实施例中,固定抓手机构32和摆动抓手机构 44上均设置有防护罩6,保证内部清洁。
29.应当理解,以上所描述的具体实施例仅用于解释本实用新型,并不用于限定本实用新型。由本实用新型的精神所引伸出的显而易见的变化或变动仍处于本实用新型的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1