一种拦网下料时的收集整理装置的制作方法
1.本实用新型涉及塔机平台零件加工领域,具体涉及一种拦网下料时的收集整理装置。
背景技术:
2.拦网通过冲压设备将板材冲成网孔状的拦网,在进行拦网冲孔完毕后,需要人工将拉网整理在一起然后搬运到平台焊接岗位上去,由于拦网采用冲的方式呈现,拦网的边缘比较锋利,同时人工进行整理的话,工作人员的劳动强度比较的大,同时在进行整理的时候,容易产生划伤工作人员情况,同时工作人员进行整理的话,由于拦网的加工完需要马上进行整理,由于人工整理的速度有限,这样必须要降低拦网的加工速度,这样导致加工效率的降低。
技术实现要素:
3.针对上述现有技术的不足,本实用新型提出了一种拦网下料时的收集整理装置,对冲压后形成的拦网进行自动收集整理,这样拦网收集整理的速度比较的快,同时可以加快拦网加工的速度,同时自动对拦网进行收集与整理,这样降低工作人员的劳动强度。
4.为实现上述的目的,本实用新型的方案:一种拦网下料时的收集整理装置,包括托板、位置监测机构、拦网夹取机构与拦网整理机构,其中托板设置在拦网冲压成型设备下料口的下方,成型的拦网掉落到托板上,在托板远离拦网冲压成型设备的一侧设置有位置监测机构且位置监测机构可以在托板上进行滑动;在托板的外侧设置有拦网夹取机构,拦网夹取机构上设置有对拦网进行夹取的夹取臂且夹取臂可以进行伸缩,这样实现夹取臂对网板的夹取与移动,在托板上开有对夹取臂进行让位的让位槽;在拦网夹取机构的下方设置有对拦网进行整理的拦网整理机构,拦网夹取机构上拦网掉落到拉网整理机构上,通过拦网整理机构第拦网进行整理并输送走。
5.优选地,拦网夹取机构包括支撑座、滑动轨道、滑动座与夹取臂,在托板的一侧设置有支撑座,在支撑座与托板之间设置有两道滑动轨道且每道滑动轨道上均设置有在滑动轨道上移动的滑动座,滑动座与滑动轨道之间设置有直线电机,通过直线电机带动滑动座在滑动轨道上移动,在滑动座的内侧设置有对拦网进行夹取的夹取臂,通过夹取臂对拦网的端面进行夹取,通过滑动座拖动拦网进行移动,夹取臂即为机械臂,在机械臂设置有触发开关,在机械臂一侧的滑动轨道上设置有导向轨道且导向轨道上套有在导向轨道上来回滑动的两个套筒,在每个套筒上均设置有行程开关,在套筒上设置有对套筒进行锁止的锁止组件,当触发开关与行程开关相对的时候,直线电机反向移动,同时夹取臂进行一次反向动作并维持。
6.优选地,位置监测机构即为红外线反射传感器,在托板上设置有让位槽进行平行的滑动槽,在滑动槽内设置滑动片,在滑动片与托板底部之间设置滑动锁止组件,滑动片可以沿着滑动槽进行滑动,同时滑动片还能锁止在滑动槽内,在滑动片上固定有红外线反射
传感器且红外线反射传感器的检测头朝上设置。
7.优选地,拦网整理机构包括滑动平台、推板与滑动隔板,在滑动轨道的下方设置有滑动平台且滑动平台的滑动方向与滑动轨道垂直,在滑动平台的一侧与支撑座侧面接触,在托板的下方设置有朝向滑动平台的推板,在推板的背面上固定有推动气缸且推动气缸的缸体固定在地面上,通过推板推动的方式对拦网进行整理,在滑动平台一侧设置有滑动隔板,通过滑动隔板实现将整理完毕的拦网卸下来。
8.与现有技术相比,本实用新型的优点:1、对冲压后形成的拦网进行自动收集整理,这样拦网收集整理的速度比较的快,同时可以加快拦网加工的速度,同时自动对拦网进行收集与整理,这样降低工作人员的劳动强度。
附图说明
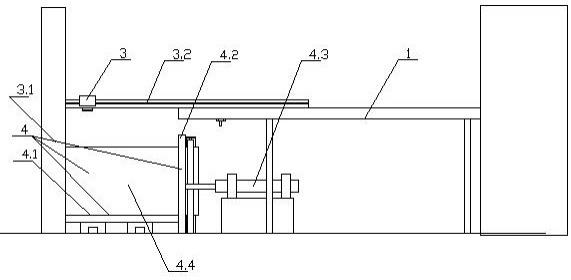
9.图1为本实用新型的主视图。
10.图2为本实用新型拦网夹取机构的示意图。
11.图3为本实用新型位置监测机构的示意图。
12.其中,1、托板,1.1、让位槽,2、位置监测机构,2.1、红外线反射传感器,2.2、滑动槽,2.3、滑动片,2.4、滑动锁止组件,3、拦网夹取机构,3.1、支撑座,3.2、滑动轨道,3.3、滑动座,3.4、夹取臂,3.5、触发开关,3.6、导向轨道,3.7、套筒,3.8、行程开关,3.9、锁止组件,4、拦网整理机构,4.1、滑动平台,4.2、推板,4.3、推动气缸,4.4、滑动隔板。
具体实施方式
13.现结合附图,对本实用新型进一步的阐述。
14.如图1-3所示,一种拦网下料时的收集整理装置,包括托板1、位置监测机构2、拦网夹取机构3与拦网整理机构4,其中托板1设置在拦网冲压成型设备下料口的下方(在托板1的底部通过焊接的方式固定有多根放置在地面上的支撑脚),成型的拦网掉落到托板1上,在托板1远离拦网冲压成型设备的一侧(左侧)设置有位置监测机构2且位置监测机构2可以在托板1上进行滑动,通过位置检测机构的滑动可以根据拦网的大小调节位置检测机构的位置,实现拦网加工完毕后就能被位置检测机构检测并被拦网夹取机构3拿走;在托板1的外侧设置有拦网夹取机构3,拦网夹取机构3上通过焊接的方式固定有对拦网进行夹取的夹取臂3.4且夹取臂3.4可以进行伸缩,通过伸缩实现拦网的移动,这样实现夹取臂3.4对网板的夹取与移动,在托板1上开有对夹取臂3.4进行让位的让位槽1.1,便于夹取臂3.4伸入到让位槽1.1内并对托板1上的拦网进行夹取;在拦网夹取机构3的下方设置有对拦网进行整理的拦网整理机构4,拦网夹取机构3上拦网掉落到拉网整理机构上,通过拦网整理机构4第拦网进行整理并输送走,这样无需人工将加工完毕的拦网进行整理,通过自动的方式对加工完毕的拦网进行整理,这样降低人工人员的劳动强度,同时收集整理的速度比较的快,这样同样也提高了拦网的加工效率(整理的速度比较快,这样可以提高拦网的加工效率)。
15.拦网夹取机构3包括支撑座3.1、滑动轨道3.2、滑动座3.3与夹取臂3.4,在托板1的左侧地面上通过螺栓预埋的固定方式固定有支撑座3.1,在支撑座3.1与托板1之间通过焊接的方式固定有两道滑动轨道3.2且每道滑动轨道3.2上均卡设有在滑动轨道3.2上移动的滑动座3.3,滑动座3.3与滑动轨道3.2之间设置有直线电机(直线电机定子通过焊接的方式
固定在滑动轨道3.2上,直线电机的动子通过焊接的方式固定在滑动座3.3上),通过直线电机带动滑动座3.3在滑动轨道3.2上移动,在滑动座3.3的内侧通过焊接的方式固定有对拦网进行夹取的夹取臂3.4(即为市面上夹取物料的机械臂,购买获得),通过夹取臂3.4对拦网的端面进行夹取,通过滑动座3.3拖动拦网向左侧进行移动,夹取臂3.4即为机械臂,在机械臂通过螺栓紧固的方式固定有触发开关3.5,在机械臂一侧的滑动轨道3.2上通过焊接的方式固定有导向轨道3.6且导向轨道3.6上套有在导向轨道3.6上来回滑动的两个套筒3.7,在每个套筒3.7上均通过焊接的方式固定有行程开关3.8,在套筒3.7上设置有对套筒3.7进行锁止的锁止组件3.9(锁止组件3.9即为螺栓,螺栓穿过套筒3.7抵在导向轨道3.6上,通过拧紧螺栓实现套筒3.7的固定,两个行程开关3.8的间距即为夹取臂3.4移动的行程,根据拦网的尺寸调节行程开关3.8的位置),当触发开关3.5与行程开关3.8相对的时候(行程开关3.8与触发开关3.5即为激光光电门(m18激光对射光电开关e3f30lc)的发射器与接收器,其中触发开关3.5为接收器,行程开关3.8为发射器,当接触开关与行程开关3.8相对的时候,接触开关接收到行程开关3.8发射出来的光线而触发),直线电机反向移动,同时夹取臂3.4进行一次反向动作并维持,即为当机械臂张开,当接触开关被托板1上的行程开关3.8(右侧的行程开关3.8)触发的时候,机械臂合拢对网板进行夹取,同时滑动座3.3向左侧移动移动,这样机械臂拉动拦网向左侧移动,当滑动座3.3上的触发开关3.5被左侧的行程开关3.8触发的时候,机械臂张开,这样拦网掉落下去,然后机械臂向右移动。
16.位置监测机构2即为红外线反射传感器2.1(型号为sdp8476-201),在托板1上开设有横向设置的滑动槽2.2,在滑动槽2.2内设置滑动片2.3(在滑动槽2.2的底部设置有托杆,滑动片2.3放置在托杆上,这样滑动片2.3在滑动槽2.2内进行滑动),在滑动片2.3与托板1底部之间设置滑动锁止组件3.92.4(在滑动片2.3的底部通过焊接的方式固定有丝杆,在丝杆上穿过有压片,在压片下方的丝杆上套有螺母,通过螺母将压片按压在托杆上,这样实现滑动片2.3的锁止),滑动片2.3可以沿着滑动槽2.2进行滑动,同时滑动片2.3还能锁止在滑动槽2.2内,在滑动片2.3上通过焊接的发内杆上固定有红外线反射传感器2.1且红外线反射传感器2.1的检测头朝上设置,当拦网的左端位于红外线反射传感器2.1的时候,表示拉网已经加工完毕(根据拦网的尺寸可以调整滑动片2.3的位置,滑动片2.3上红外线反射传感器2.1的位置与拦网冲压成型设备下料口的间距即为拦网的宽度)。
17.拦网整理机构4包括滑动平台4.1、推板4.2与滑动隔板4.4,在滑动轨道3.2的下方的地面上设置有滑动平台4.1且滑动平台4.1的滑动方向与滑动轨道3.2垂直(即为滑动平台4.1纵向滑动,在滑动平台4.1下方的地面上固定有轨道,在轨道与滑动平台4.1之间通过焊接的方式固定有直线电机,通过直线电机带动滑动平台4.1进行移动),在滑动平台4.1的左侧与支撑座3.1的右侧面接触,在托板1的下方的地面上设置有朝向滑动平台4.1的推板4.2,在推板4.2的背面(右侧面)上通过焊接的方式固定有推动气缸4.3且推动气缸4.3的缸体通过螺栓固定在地面上,通过推板4.2推动的方式对拦网进行整理(通过推板4.2将拦网向左推动整理),在滑动平台4.1后侧设置有滑动隔板4.4(即为滑动隔板4.4位于滑动平台4.1的上方,在轨道的左右两侧均设置有一对将滑动隔板4.4夹紧的辊筒,位于左侧的辊筒通过步进电机进行驱动,通过辊筒的转动实现滑动隔板4.4的左右移动,当滑动隔板4.4移动滑动平台4.1上方的时候,当滑动平台4.1向前移动的时候,滑动隔板4.4可以阻止整理完毕的拦网向前移动,这样使拦网脱离滑动平台4.1而实现卸料),通过滑动隔板4.4实现将整
理完毕的拦网卸下来。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1