一种智慧农业大棚用采摘运输设备的制作方法
1.本技术涉及农业运输技术领域,尤其涉及一种智慧农业大棚用采摘运输设备。
背景技术:
2.蔬菜生产量高,蔬菜消费量大,蔬菜种植业的迅速发展对于现代蔬菜采摘运输效率提出了新的要求。
3.在大棚内部进行采摘后的运输,由于受到种植的影响,所以一般采用独轮车进行运输,由于独轮车的平衡性不够,所以容易发生倾倒时间,对两边的农作物造成影响。
4.现有技术中运输处理方式绝大部分还是依靠人力完成,在进行运输时需要利用很大的人力来推,如果不小心还可能发生独轮车倾倒之间,影响农作物的生长。
技术实现要素:
5.(一)解决的技术问题
6.针对现有技术的不足,本技术提供了一种智慧农业大棚用采摘运输设备,具备大棚内种植农作物方便运输,且可以节省人力等优点,用于解决现有技术中大棚内部农作物运输不方便的问题。
7.(二)技术方案
8.本技术提供如下技术方案:一种智慧农业大棚用采摘运输设备,包括安装架和滑轨,所述运输设备还包括运输机构、放置篮、控制机构和安装箱,所述滑轨贯穿所述安装箱并与所述安装箱连接,所述运输机构包括安装板、电机、第一链轮、第二链轮、转轴、外棘轮、内棘轮、滚轮和辅助轮,所述安装板位于所述安装箱内部并与所述安装箱连接,所述电机与所述安装板连接,所述第一链轮与所述电机输出端连接,所述转轴与所述安装箱连接,所述第二链轮和外棘轮均与所述转轴连接,所述滚轮与所述滑轨接触,所述内棘轮与所述滚轮连接。
9.通过本技术所提供的一种智慧农业大棚用采摘运输设备,可以对大棚中的农作物进行运输,相对于人力搬运的方式,本技术所提供的方式能够便于对农作物进行长距离的运输,且能够减少人力对农作物的搬运,使农作物在运输的时候更加省力。
10.通过设置运输机构可以便于对采摘后的农作物进行运输,能够将人力运输转变为机械式的运输,且在大棚内的占地空间极小,便于对大棚空间的利用,从而节省了人力在大棚内对农作物的运输,使大棚内的农作物运输更加方便,以提供农作物运输的便捷性。
11.在一种可能的实施方式中,所述第一链轮和第二链轮通过链条传动,所述转轴能够相对于所述安装箱转动。
12.通过第一链轮和第二链轮可以便于电机到转轴的传动,以方便带动安装箱和滑轨之间滑动,使得运输传动更加方便,进一步的提高在运输时的稳定性。
13.在一种可能的实施方式中,所述外棘轮和内棘轮接触,且内棘轮能够相对于所述外棘轮转动,所述滚轮与所述滑轨紧密接触,且能够相对于所述滑轨转动。
14.通过设置外棘轮和内棘轮可以在安装箱向两个方向进行滑动,在电机带动安装箱移动时,外棘轮垂直边与内棘轮垂直边相互限制,电机能够带动滚轮滚动,在安装箱向相反的方形移动时,人力进行拖动,滚轮带动内棘轮转动,由于内棘轮和外棘轮倾斜边接触,且有链轮的限制,所以外链轮不动,从而减轻了操作人员在拖动时所使用的力。
15.在一种可能的实施方式中,所述辅助轮与所述安装箱连接,且能够相对于所述安装箱转动,所述辅助轮与所述滑轨接触。
16.通过设置辅助轮可以减少安装箱和滑轨之间的摩擦,以方便安装箱的运动,且能够增加安装箱的使用寿命,在运输设备在运行时更加稳定。
17.在一种可能的实施方式中,所述滑轨与所述安装架连接,所述安装架安装在农业大棚的地面,所述运输机构和控制机构均与所述安装箱连接,所述放置篮与所述控制机构连接,所述控制机构包括连接板、按压开关、连杆、按钮开关和顶杆,所述连接板位于所述安装箱内,所述连杆贯穿所述安装箱并与所述连接板连接,所述放置篮与所述连杆连接,所述按压开关位于所述安装箱并与所述安装箱连接,所述安装箱具有安装孔,所述按钮开关和顶杆均位于所述安装孔并与所述安装箱连接。
18.通过设置控制机构可以对电机的运行进行控制,以方便运输设备的自动运输,且能够在无人照看的作用下进行,能够根据放置篮内放置农作物的重量自行启动。
19.在一种可能的实施方式中,所述连接板和按压开关具有第一弹簧,所述连杆能够带动所述连接板相对于所述安装箱移动,所述连接板能够触发按压开关。
20.通过设置按压开关可以控制电机的启动,当放置篮中的农作物达到一定重量时,连杆会带动连接板下移,从而触碰到按压开关,当按压开关开启时,电机启动带动安装箱移动。
21.在一种可能的实施方式中,所述顶杆和安装箱之间具有第二弹簧,所述顶杆能够相对于所述安装箱移动,且能够触发按钮开关。
22.通过设置按钮开关可以控制电机的关闭,安装箱向安装架的一侧进行移动时,顶杆和按钮开关不接触,一旦顶杆和安装架接触,安装架会推动顶杆,顶杆对按钮开关进行按压,电机停止运行。
23.与现有技术相比,本技术提供了一种智慧农业大棚用采摘运输设备,具备以下有益效果:
24.1、本技术通过设置运输机构可以对采摘后的农产品进行运输,在长距离的大棚内,节省了人力运输的麻烦,且不用占用地面面积,利用外棘轮和内棘轮,可以在人力推动时,滚轮不会带动转轴,从而不会带动电机输出端转动,使操作人员在推动时更加轻松。
25.2、本技术通过设置控制机构可以对运输机构的电机进行控制,在放置篮内放置的农作物到达一定重量时,电机的按压开关即会被打开,电机带动放满农作物的放置篮回退,顶杆和安装架配合,将按钮开关按下,电机停止运转。
26.应当理解的是,以上的一般描述和后文的细节描述仅是示例性的,并不能限制本技术。
附图说明
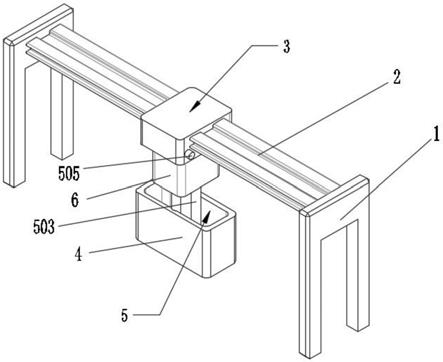
27.图1为本技术所提供的一种智慧农业大棚用采摘运输设备的整体结构示意图;
28.图2为本技术所提供的一种智慧农业大棚用采摘运输设备的安装箱剖视图;
29.图3为本技术所提供的一种智慧农业大棚用采摘运输设备的顶杆剖视图;
30.图4为本技术所提供的一种智慧农业大棚用采摘运输设备的滚轮结构俯视图。
31.其中:1安装架、2滑轨、3运输机构、4放置篮、5控制机构、6安装箱、 301安装板、302电机、303第一链轮、304第二链轮、305转轴、306外棘轮、 307内棘轮、308滚轮、309辅助轮、501连接板、502按压开关、503连杆、 504按钮开关、505顶杆。
具体实施方式
32.如图1-3所示,本技术提供一种智慧农业大棚用采摘运输设备:包括安装架1和滑轨2,运输设备还包括运输机构3、放置篮4、控制机构5和安装箱6,滑轨2贯穿安装箱6并与安装箱6连接,运输机构3包括安装板301、电机302、第一链轮303、第二链轮304、转轴305、外棘轮306、内棘轮307、滚轮308和辅助轮309,安装板301位于安装箱6内部并与安装箱6连接,电机302与安装板301连接,第一链轮303与电机302输出端连接,转轴305 与安装箱6连接,第二链轮304和外棘轮306均与转轴305连接,滚轮308 与滑轨2接触,内棘轮307与滚轮308连接。
33.通过本技术所提供的一种智慧农业大棚用采摘运输设备,可以对大棚中的农作物进行运输,相对于人力搬运的方式,本技术所提供的方式能够便于对农作物进行长距离的运输,且能够减少人力对农作物的搬运,使农作物在运输的时候更加省力。
34.通过设置运输机构3可以便于对采摘后的农作物进行运输,能够将人力运输转变为机械式的运输,且在大棚内的占地空间极小,便于对大棚空间的利用,从而节省了人力在大棚内对农作物的运输,使大棚内的农作物运输更加方便,以提供农作物运输的便捷性。
35.具体的,如图2所示,在一种可能的实施方式中,第一链轮303和第二链轮304通过链条传动,转轴305能够相对于安装箱6转动。
36.通过第一链轮303和第二链轮304可以便于电机302到转轴305的传动,以方便带动安装箱6和滑轨2之间滑动,使得运输传动更加方便,进一步的提高在运输时的稳定性。
37.具体的,如图3所示,在一种可能的实施方式中,外棘轮306和内棘轮 307接触,且内棘轮307能够相对于外棘轮306转动,滚轮308与滑轨2紧密接触,且能够相对于滑轨2转动。
38.通过设置外棘轮306和内棘轮307可以在安装箱6向两个方向进行滑动,在电机302带动安装箱6移动时,外棘轮306垂直边与内棘轮307垂直边相互限制,电机302能够带动滚轮308滚动,在安装箱6向相反的方形移动时,人力进行拖动,滚轮308带动内棘轮307转动,由于内棘轮307和外棘轮306 倾斜边接触,且有链轮的限制,所以外链轮不动,从而减轻了操作人员在拖动时所使用的力。
39.具体的,如图2所示,在一种可能的实施方式中,辅助轮309与安装箱6 连接,且能够相对于安装箱6转动,辅助轮309与滑轨2接触。
40.通过设置辅助轮309可以减少安装箱6和滑轨2之间的摩擦,以方便安装箱6的运动,且能够增加安装箱6的使用寿命,在运输设备在运行时更加稳定。
41.如图1-2和图4所示,在一种可能的实施方式中,滑轨2与安装架1连接,安装架1安装在农业大棚的地面,运输机构3和控制机构5均与安装箱6 连接,放置篮4与控制机构5连
接,控制机构5包括连接板501、按压开关 502、连杆503、按钮开关504和顶杆505,连接板501位于安装箱6内,连杆503贯穿安装箱6并与连接板501连接,放置篮4与连杆503连接,按压开关502位于安装箱6并与安装箱6连接,安装箱6具有安装孔,按钮开关 504和顶杆505均位于安装孔并与安装箱6连接。
42.通过设置控制机构5可以对电机302的运行进行控制,以方便运输设备的自动运输,且能够在无人照看的作用下进行,能够根据放置篮4内放置农作物的重量自行启动。
43.具体的,如图2所示,在一种可能的实施方式中,连接板501和按压开关502具有第一弹簧,连杆503能够带动连接板501相对于安装箱6移动,连接板501能够触发按压开关502。
44.通过设置按压开关502可以控制电机302的启动,当放置篮4中的农作物达到一定重量时,连杆503会带动连接板501下移,从而触碰到按压开关 502,当按压开关502开启时,电机302启动带动安装箱6移动。
45.具体的,如图4所示,在一种可能的实施方式中,顶杆505和安装箱6 之间具有第二弹簧,顶杆505能够相对于安装箱6移动,且能够触发按钮开关504。
46.通过设置按钮开关504可以控制电机302的关闭,安装箱6向安装架1 的一侧进行移动时,顶杆505和按钮开关504不接触,一旦顶杆505和安装架1接触,安装架1会推动顶杆505,顶杆505对按钮开关504进行按压,电机302停止运行。
47.此外本技术还提供了一种智慧农业大棚用采摘运输设备的使用方法,操作人员拖动安装箱6进行移动,安装箱6带动滚轮308转动,将安装箱6拖动到需要搬运农作物的位置,将农作物装入放置篮4内,当放置篮4内的农作物到达异性数量后,连杆503会带动连接板501与按压按钮接触,按压按钮控制电机302开启,电机302通过第一链轮303和第二链轮304带动转轴 305转动,转轴305带动外棘轮306,外棘轮306通过内棘轮307带动滚轮308 转动,从而带动安装箱6移动,当顶杆505和一侧的安装架1接触后,顶杆 505对按压按钮开关504,当按钮开关504被按下时,电机302停止运转。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1