一种强夯机手动起锤零点信号检测系统的制作方法
1.本实用新型涉及机械领域,特别涉及一种强夯机手动起锤零点信号检测系统。
背景技术:
2.强夯机利用卷扬机反复垂直起升夯锤,利用夯锤高落差产生的高冲击夯实地基。强夯机的夯击能=落距高度
×
夯锤重量,例如:夯锤重量30t,落距高度5m,夯击能=30
×
5=450kn.m。落距高度是指夯锤自由下落高度。强夯机工作模式包括脱钩模式和非脱钩模式,脱钩模式是指强夯机的起重钢丝绳上连接有脱钩器,脱钩器钩住夯锤到落距高度后(即为起锤状态),脱钩器释放夯锤(即为放锤状态),夯锤自由下落,脱钩器不随夯锤下落。非脱钩模式是指强夯机的起重钢丝绳直接连接夯锤,夯锤提升到落距高度后(即为起锤状态),松开卷扬机的抱刹机构和离合机构,夯锤自由下落(即为放锤状态),卷扬机在夯锤的拉力下反转。由于脱钩模式在每次夯击过程中,都需要下放起重钢丝绳和脱钩器与夯锤挂钩动作,造成脱钩模式的工作效率非常低,非脱钩模式在每次的夯击过程中,不需要下放起重钢丝绳和挂钩动作,因此,非脱钩模式的工作效率远远高于脱钩模式的工作效率。
3.目前,在脱钩模式下,强夯机的脱钩器连接有脱钩绳,当起锤至落距高度时,脱钩绳被拉直,夯锤脱离脱钩器释放。该落距高度是以地基为零点,在每一次夯击过程中,地基会下沉行成夯坑,造成每一次落距高度会增加,每次夯击能会增加。另外也无法检测夯坑高度。
4.在非脱钩模式下,情况发生很大变化,卷扬机在夯锤的拉力下反转,自由落体的夯锤下降速度很快,使得卷扬机反转速度很高,夯击结束后,夯锤着地,卷扬机在惯性的作用下,卷扬机会继续旋转,造成卷扬机的起重钢丝绳出绳量会很多,影响下一次夯击,无法控制落距高度,也无法检测夯坑高度。
5.在zl2019219494995号“一种强夯机手动起锤零点信号检测系统”专利中自动采集强夯机起锤零点信号,无法手动采集强夯机起锤零点信号,当自动采集强夯机起锤零点信号失效时,强夯机无法正常作业施工。
技术实现要素:
6.有鉴于此,本实用新型提出一种强夯机手动起锤零点信号检测系统,不仅可以自动采集强夯机起锤零点信号,而且可以手动采集强夯机起锤零点信号。
7.一方面,本实用新型提供了一种强夯机手动起锤零点信号检测系统,包括压绳缸和第一零点信号开关,压绳缸安装在卷扬机起重钢丝绳的出绳端,在压绳缸上设置有进口p和信号口k,信号口k与第一零点信号开关相连接,信号口k触发第一零点信号开关,第一零点信号开关与控制器连接;包括第二零点信号开关,第二零点信号开关与控制器连接,第二零点信号开关手动采集强夯机起锤零点信号,第一零点信号开关自动采集强夯机起锤零点信号。
8.进一步地,第二零点信号开关安装在操作手柄上。
9.进一步地,包括切换开关,切换开关的两个输出端分别与第一零点信号开关及第二零点信号开关相连接,切换开关的输入端与电源相连接,当切换开关处于自动档位时,电源与第一零点信号开关连通,当切换开关处于手动档位时,电源与第二零点信号开关连通。
10.进一步地,压绳缸为气缸或者油缸,当压绳缸进口p得气或得油压绳缸伸出时,信号口k得气或得油;当压绳缸缩回时,信号口k断气或断油。
11.进一步地,包括超前阀、油气阀、继动阀、二级制动夹钳;二级制动夹钳用于制动卷扬机;超前阀和油气阀的进气口与先导控制气源相通,油气阀的出气口与超前阀的控制口相通,油气阀的控制口与起锤先导油路相通,超前阀的出气口与继动阀的进气口相通,继动阀的出气口通向二级制动夹钳控制气路,继动阀的控制口与信号口k相通。
12.进一步地,在常态下,超前阀的进气口与出气口连通;油气阀的进气口与出气口断开,继动阀的进气口与出气口断开。
13.进一步地,包括非脱钩模式切换阀,非脱钩模式切换阀的出气口与超前阀和油气阀的进气口相通,非脱钩模式切换阀的进气口与先导控制气源相通。
14.进一步地,当起锤先导油路未得油时,且压绳缸伸出信号口k得气或得油,二级制动夹钳制动夹紧;当起锤先导油路得油或者压绳缸缩回信号口k断气或断油时,二级制动夹钳制动松开。
15.进一步地,在每次起锤前中,控制器首先控制压绳缸伸出压紧起重钢丝绳,在起锤时,压绳缸在起重钢丝绳的反作用力下,压绳缸缩回,控制器采集第一零点信号开关通断信号或者第二零点信号开关通断信号,控制器根据第一零点信号开关信号或者第二零点信号开关信号确定强夯机起锤零点信号。
16.本实用新型的一种强夯机手动起锤零点信号检测系统相比现有技术有益效果在于:
17.当切换开关处于自动档位时,控制器根据第一零点信号开关(12)信号确定强夯机起锤零点信号。当切换开关处于手动档位时,控制器根据第二零点信号开关信号确定强夯机起锤零点信号。不仅可以自动采集强夯机起锤零点信号,而且可以手动采集强夯机起锤零点信号。当自动采集强夯机起锤零点信号失效时,可以通过切换开关切换至手动档位进行强夯机起锤零点信号采集,可以根据强夯机起锤零点信号得到卷扬机起重钢丝绳被拉直状态的出绳量,根据上下两次卷扬机起重钢丝绳被拉直状态的出绳量差值得到每次夯击深度,确保强夯机每次落距高度和夯击能不变。
附图说明
18.构成本实用新型的一部分的附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
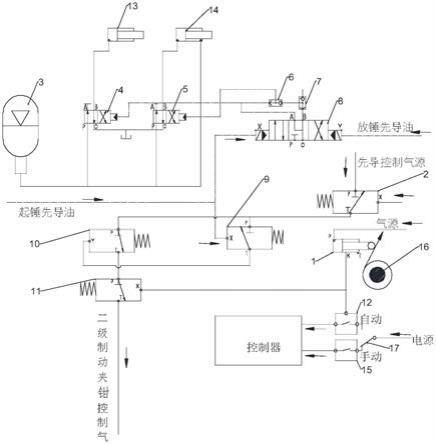
19.图1为本实用新型的强夯机手动起锤零点信号检测系统结构示意图。
具体实施方式
20.需要说明的是,在不冲突的情况下,本实用新型中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本实用新型。
21.如图1所示,本实用新型提供了一种强夯机手动起锤零点信号检测系统,包括压绳缸1和第一零点信号开关12,在压绳缸1的无杆腔设置有进口p,在压绳缸1的中部设置有信号口k,在压绳缸1的有杆腔设置有出口t。压绳缸1为气缸或者油缸,当压绳缸1进口p得气或得油压绳缸1伸出时,信号口k得气或得油;当压绳缸1缩回时,信号口k断气或断油。第一零点信号开关12一端与控制器连接,第一零点信号开关12另一端与电源连接。压绳缸1安装在卷扬机6起重钢丝绳的出绳端,信号口k与第一零点信号开关12相连接,信号口k触发第一零点信号开关12,使第一零点信号开关12通断。
22.包括第二零点信号开关15和切换开关17,第二零点信号开关15安装在操作手柄上。第二零点信号开关(15)与控制器连接,第二零点信号开关(15)手动采集强夯机起锤零点信号。切换开关17的两个输出端分别与第一零点信号开关12及第二零点信号开关15相连接,切换开关17的输入端与电源相连接,当切换开关17处于自动档位时,电源与第一零点信号开关(12)连通,当切换开关17处于手动档位时,电源与第二零点信号开关15连通。当操作手看见卷扬机6起重钢丝绳被拉紧时,操纵手柄上的第二零点信号开关15通断,控制器根据第二零点信号开关15信号确定强夯机起锤零点信号。
23.为了防止卷扬机在压绳缸1的作用转动,影响检测强夯机起锤零点信号。在进一步技术方案中,在每一次压绳缸1伸出压紧起重钢丝绳时,通过二级制动夹钳将卷扬机6制动,其包括非脱钩模式切换阀2、超前阀10、油气阀9、继动阀11、二级制动夹钳(图中未示出);二级制动夹钳用于制动卷扬机6;超前阀10和油气阀9的进气口与先导控制气源相通,油气阀9的出气口与超前阀10的控制口相通,油气阀9的控制口与起锤先导油路相通,超前阀10的出气口与继动阀11的进气口相通,继动阀11的出气口通向二级制动夹钳控制气路,继动阀11的控制口与信号口k相通。非脱钩模式切换阀2的出气口与超前阀10和油气阀9的进气口相通,非脱钩模式切换阀2的进气口与先导控制气源相通。
24.在常态下,超前阀10的进气口与出气口连通;油气阀9的进气口与出气口断开,继动阀11的进气口与出气口断开。
25.本实用新型的强夯机手动起锤零点信号检测系统工作过程如下,
26.将非脱钩模式切换阀2切换至非脱钩模式,非脱钩模式切换阀2打开,先导控制气源通过非脱钩模式切换阀2进入超前阀10和油气阀9的进气口p。在每次起锤之前,气源进入压绳缸1的进口p,压绳缸1伸出压紧起重钢丝绳,起重钢丝绳压紧。此时压绳缸1的信号口k得气,继动阀11打开,第一零点信号开关12打开,先导控制气源通过超前阀10、继动阀11进入二级制动夹钳控制气路,使卷扬机6制动,防止卷扬机6在压绳缸1作用力下反转,防止影响检测强夯机起锤零点信号。
27.在起锤时,起锤先导油路得油,此时,油气阀9打开,超前阀10断开,二级制动夹钳松开,压绳缸1在起重钢丝绳的反作用力下,压绳缸1缩回,此时压绳缸1的信号口k断气,继动阀11断开。当切换开关17处于自动档位时,第一零点信号开关12断开。当切换开关17处于手动档位时,操纵手柄上的第二零点信号开关15通断。控制器采集第一零点信号开关12或者第二零点信号开关15通断信号,控制器根据第一零点信号开关12信号或者第二零点信号开关15确定强夯机起锤零点信号,此时控制器采集卷扬机6旋转圈数计算得出起重钢丝绳出绳量。根据上下两次起锤零点信号的起重钢丝绳出绳量变化值,就可以检测每次夯击深度,确保强夯机每次落距高度和夯击能不变。
28.在非脱钩模式下,为了实现离合油缸13和抱刹油缸14连动。包括第一液压控制阀4、第二液压控制阀5、先导控制阀8、液压储能器3、第一梭阀6、第二梭阀7;抱刹机构8包括抱刹油缸14,离合机构8包括离合油缸13;
29.第一液压控制阀4的b口与离合油缸13连通,第二液压控制阀5的b口与抱刹油缸14的无杆腔连通,抱刹油缸14的有杆腔与液压储能器3连通,第一液压控制阀4的p口和第二液压控制阀5的p口与液压储能器3连通;第一液压控制阀4的o口和第二液压控制阀5的o口为回油口;第一液压控制阀4的a口和第二液压控制阀5的a口为封堵口;
30.在常态状态下,第一液压控制阀4位于左位,第一液压控制阀4的p口与第一液压控制阀4的a口相通,第一液压控制阀4的o口与第一液压控制阀4的b口相通;当第一液压控制阀4位于右位时,第一液压控制阀4的p口与第一液压控制阀4的b口相通,第一液压控制阀4的o口与第一液压控制阀4的a口相通;
31.在常态状态下,第二液压控制阀5位于左位,第二液压控制阀5的p口与第二液压控制阀5的a口相通,第二液压控制阀5的o口与第二液压控制阀5的b口相通;当第二液压控制阀5位于右位时,第二液压控制阀5的p口与第二液压控制阀5的b口相通,第二液压控制阀5的o口与第二液压控制阀5的a口相通。
32.第二液压控制阀5的控制口与第一梭阀6的输出口相通,第一液压控制阀4的控制口与第一梭阀6的第一输入口相通,第一梭阀6的第二输入口与第二梭阀7的输出口相通,第二梭阀7的第一输入口与先导控制阀8的b口相通,第一液压控制阀4的控制口与先导控制阀8的a口相通;
33.先导控制阀8为三位四通阀,先导控制阀8左端控制口与起锤先导油路相连,先导控制阀8右端控制口与放锤先导油路相连。先导控制阀8的中位为y位职能,当先导控制阀8位于左位时,先导控制阀8的p口与先导控制阀8的a口相通,先导控制阀8的o口与先导控制阀8的b口相通;当先导控制阀8位于右位时,先导控制阀8的p口与先导控制阀8的b口相通,先导控制阀8的o口与先导控制阀8的a口相通;先导控制阀8的o口为回油口。
34.当起锤先导油路得油时,先导控制阀8处于左位,离合机构8闭合,抱刹机构8打开(即未刹车状态),实现夯锤上升动作。当放锤先导油路得油时,先导控制阀8处于右位,离合机构8分离,抱刹机构8打开(即未刹车状态),实现夯锤自由落体下放动作。当先导控制阀8处于中位时,离合机构8分离,抱刹机构8闭合((即刹车状态),实现空中起停动作。离合油缸13和抱刹油缸14控制液压油路结构巧妙,稳定性和安全性好。
35.以上未描述的技术是本领域技术人员的公知常识。以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1