一种输液袋灭菌运输转台的定位装置及包含其的转台的制作方法
1.本实用新型涉及运输传动领域,具体涉及一种输液袋灭菌运输转台的定位装置及包含其的转台。
背景技术:
2.基于大输液领域中灭菌柜自动轨中的转台为背景,在大输液灭菌系统中多用自动轨作为药品装载车的运输工具,它能满足生产中的自动运输需求。大输液系统中自动轨分为:直线轨道(辊道或链道)、顶升平移、拆叠盘机、转台等。而其中的转台作用是实现装载车的转弯换向运行,且能够实现0
°
至360
°
全方位角度换向。但由于转台在旋转的过程中的惯性、扭矩、摩擦力和部分机械损耗使转台在换向过程中的定位成为一个难点。
3.转台的运行方式:当装载车进入转台后,转台开始旋转,转台定位器进行动作使转台固定在预定角度。当装载车离开转台后,转台开始回旋到原始位。
4.传统的转台定位通过气缸动作定位,在转台到位时,定位气缸向上动作插入气缸定位块,使转台固定在预定旋转角度中。当装载车进或出完成后需要转台再次旋转时,要定位气缸向下动作后,转台才能进行旋转动作。转台因重量、惯性和摩擦力等因素,在旋转到位后会进行一段无规律运动,在这段无规律运动中定位气缸动作时会照成定位不准,使转台偏离预定旋转角度,从而照成装载车进出车时撞车。
技术实现要素:
5.本实用新型所要解决的问题是转台定位不准,目的在于提供了一种输液袋灭菌运输转台的定位装置及包含其的转台。
6.一种输液袋灭菌运输转台的定位装置,所述定位装置固定设置在转台内,所述转台包括旋转平台、主体框架、旋转主轴和旋转电机,所述旋转平台水平设置在所述主体框架的上方,所述旋转电机的转矩输出轴通过所述旋转主轴与所述旋转平台的中轴固定连接;
7.所述定位装置包括:定位铁芯、电磁铁和控制系统,所述定位铁芯与所述旋转平台固定连接,至少一个所述电磁铁与所述主体框架固定连接;
8.处于定位状态时,所述电磁铁与所述定位铁芯磁性吸合;
9.所述旋转电机和所述电磁铁均与所述控制系统电连接。
10.优选地,所述电磁铁的数量为两个,两个所述电磁铁均与所述主体框架固定连接,两个所述电磁铁与所述旋转主轴之间的连线的夹角等于所述旋转平台工作时的转动角度。
11.具体地,设定两个所述电磁铁分别为原点电磁铁和到位电磁铁;
12.所述旋转平台处于初始位置时,所述原点电磁铁与所述铁芯吸合;
13.所述旋转平台处于最终位置时,所述到位电磁铁与所述铁芯吸合。
14.具体地,所述控制系统包括:
15.占位感应器,用于检测所述旋转平台上是否有待转向设备;
16.原点感应器,用于检测所述旋转平台是否处于初始位置;
17.到位感应器,用于检测所述旋转平台是否处于最终位置;
18.控制器,用于接收所述占位感应器、所述原点感应器、所述到位感应器的信息,并控制所述原点电磁铁、所述到位电磁铁和所述旋转电机的工作状态;
19.所述控制器与所述占位感应器、所述原点感应器、所述到位感应器、所述原点电磁铁、所述到位电磁铁和所述旋转电机电连接。
20.具体地,所述定位装置还包括上硬限位块和下硬限位块,所述上硬限位块与所述转台固定连接,所述下硬限位块与所述主体框架固定连接,所述上硬限位块和所述下硬限位块在水平面上的投影均位于与所述旋转主轴的圆心重合的同心圆上。
21.作为一个实施例,设定所述上硬限位块的数量为两个,分别为原点上限位块和到位上限位块,所述下硬限位块的数量为一个,两个所述上硬限位块与所述旋转主轴之间的连线的夹角等于所述旋转平台工作时的转动角度;
22.所述旋转平台处于初始位置时,所述原点上限位块与所述下硬限位块贴合抵靠;
23.所述旋转平台处于最终位置时,所述到位上限位块与所述下硬限位块贴合抵靠;
24.所述下硬限位块设置在所述原点上限位块与所述到位上限位块之间。
25.作为另一个实施例,设定所述下硬限位块的数量为两个,分别为原点下限位块和到位下限位块,所述上硬限位块的数量为一个,两个所述下硬限位块与所述旋转主轴之间的连线的夹角等于所述旋转平台工作时的转动角度;
26.所述旋转平台处于初始位置时,所述原点下限位块与所述上硬限位块贴合抵靠;
27.所述旋转平台处于最终位置时,所述到位下限位块与所述上硬限位块贴合抵靠;
28.所述上硬限位块设置在所述原点下限位块与所述到位下限位块之间。
29.具体地,所述旋转平台的下侧面与所述主体框架的上侧面之间设置有间隙层,所述电磁铁、所述定位铁芯、所述上硬限位块、所述下硬限位块、所述原点感应器、所述到位感应器均位于所述间隙层,所述占位感应器设置在所述旋转平台上。
30.一种运输轨道的转台,包含上述的一种输液袋灭菌运输转台的定位装置。
31.本实用新型与现有技术相比,本实用新型通过定位铁芯和电磁铁配合,并通过电磁铁的通断电来控制对定位铁芯的吸附,使转台定位精确、高效、无晃动。
附图说明
32.附图示出了本实用新型的示例性实施方式,并与其说明一起用于解释本实用新型的原理,其中包括了这些附图以提供对本实用新型的进一步理解,并且附图包括在本说明书中并构成本说明书的一部分,并不构成对本实用新型实施例的限定。
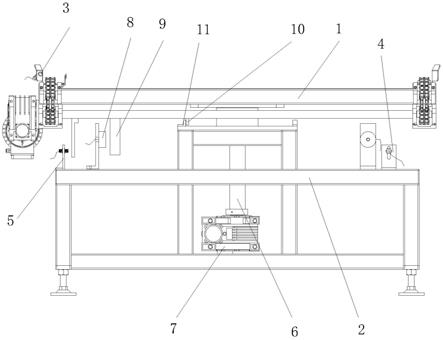
33.图1是根据本实用新型所述的一种输液袋灭菌运输转台的定位装置的结构示意图。
34.图2是根据本实用新型所述的一种运输轨道的转台的结构示意图。
35.图3是根据本实用新型所述的实施例一的安装示意图。
36.图4是根据本实用新型所述的实施例二的安装示意图。
37.附图标记:1-旋转平台,2-主体框架,3-占位感应器,4-原点感应器,5-到位感应器,6-旋转主轴,7-旋转电机,8-电磁铁,81-原点电磁铁,82-到位电磁铁,9-定位铁芯,10-上硬限位块,11-下硬限位块。
具体实施方式
38.为使本实用新型的目的、技术方案和优点更加清楚明白,下面结合附图和实施方式对本实用新型作进一步的详细说明。可以理解的是,此处所描述的具体实施方式仅用于解释相关内容,而非对本实用新型的限定。
39.另外还需要说明的是,为了便于描述,附图中仅示出了与本实用新型相关的部分。
40.在不冲突的情况下,本实用新型中的实施方式及实施方式中的特征可以相互组合。下面将参考附图并结合实施方式来详细说明本实用新型。
41.本实用新型提供了一种转台,其包括了一种输液袋灭菌运输转台的定位装置、旋转平台1、主体框架2、旋转主轴6和旋转电机7等,旋转平台1水平设置在主体框架2的上方,旋转电机7的转矩输出轴通过旋转主轴6与旋转平台1的中轴固定连接。
42.转台一般设置在两个呈一定夹角的直线轨道的连接处,用于对在整个传输流水线中的转弯操作,由上一个直线轨道将待转向的设备(装载车、装载箱等)运输至旋转平台1上,然后通过旋转电机7带动旋转主轴6使旋转平台1旋转,旋转到既定角度后,由下一个直线轨道将待转向设备取出,实现了其转向操作。
43.转台为现有的技术,还包括有图中示出了但未进行标记的进出盘电机、进出车链道等。
44.本实施例提供一种输液袋灭菌运输转台的定位装置,定位装置固定设置在转台内,定位装置包括:定位铁芯9、电磁铁8和控制系统,定位铁芯9与旋转平台1固定连接,至少一个电磁铁8与主体框架2固定连接;
45.此处电磁铁8的数量不做限定,可以根据需求对电磁铁8的数量以及位置进行确定,设置两个电磁铁8,即可以使旋转平台1在两个电磁铁8角度之间进行切换。设置三个电磁铁8,即可以使旋转平台1在三个电磁铁8角度之间进行切换。
46.处于定位状态时,电磁铁8与定位铁芯9磁性吸合,来实现旋转平台1与主体框架2之间的位置进行固定。
47.吸附时,旋转平台1与主体框架2之间不发生转动。
48.不吸附时,旋转平台1与主体框架2之间可发生转动。
49.电磁铁8与定位铁芯9的吸合状态至少有两种,如图3和图4所示。
50.实施例一
51.此实施例中,电磁铁8与旋转主轴6的距离大于定位铁芯9与旋转主轴6之间的距离,即如图3所示,电磁铁8的内侧面与定位铁芯9的外侧面贴合。
52.实施例二
53.此实施例中,电磁铁8与旋转主轴6的距离等于定位铁芯9与旋转主轴6之间的距离,即如图4所示,电磁铁8的径向侧面与定位铁芯9的径向侧面贴合。
54.旋转电机7和电磁铁8均与控制系统电连接,通过对电磁铁8进行通电与断电,实现电磁铁8对定位铁芯9的吸附。旋转电机7工作时,电磁铁8断电;电磁铁8工作时,旋转电机7不工作。
55.下面以两个电磁铁8为例提供一个具体的实施例。
56.电磁铁8的数量为两个,两个电磁铁8均与主体框架2固定连接,两个电磁铁8与旋转主轴6之间的连线的夹角等于旋转平台1工作时的转动角度。
57.设定转台设置在两个垂直的直线轨道之间,因此,两个电磁铁8与旋转主轴6之间的连线垂直。
58.为了便于描述,将两个电磁铁8分别命名为原点电磁铁81和到位电磁铁82;
59.当旋转平台1处于初始位置时,原点电磁铁81与铁芯吸合;
60.当旋转平台1处于最终位置时,到位电磁铁82与铁芯吸合。
61.控制系统包括:
62.占位感应器3,用于检测旋转平台1上是否有待转向设备,当旋转平台1上有待转向设备时,占位感应器3向控制器发出信息。
63.原点感应器4,用于检测旋转平台1是否处于初始位置;
64.到位感应器5,用于检测旋转平台1是否处于最终位置;
65.原点感应器4和到位感应器5的配合,可以对旋转平台1的位置进行确认,即:处于初始位置,处于最终位置,处于初始位置向最终位置旋转的过程中,处于最终位置向初始位置复位的过程中。
66.控制器,用于接收占位感应器3、原点感应器4、到位感应器5的信息,并控制原点电磁铁81、到位电磁铁82和旋转电机7的工作状态;
67.控制器与占位感应器3、原点感应器4、到位感应器5、原点电磁铁81、到位电磁铁82和旋转电机7电连接。
68.结合上述各部件,简述一下工作原理:
69.旋转平台1处于初始位置,原点感应器4向控制器发送在位信号,此时原点电磁铁81通电,原点电磁铁81与定位铁芯9吸合,旋转电机7不工作。
70.当待转向设备进入旋转平台1后,占位感应器3检测并将相关信息发送至控制器;
71.控制器控制原点电磁铁81断电,原点电磁铁81与定位铁芯9不吸附,再控制旋转电机7工作,使旋转电机7驱动旋转平台1由初始位置向最终位置旋转。
72.旋转平台1旋转至最终位置后,到位感应器5检测到并将相关信息发送至控制器。
73.控制器控制到位电磁铁82通电,到位电磁铁82与定位铁芯9吸附,与此同时,控制旋转电机7停止工作,使得旋转平台1停留在最终位置,并与主体框架2固定。
74.当待转向设备离开旋转平台1后,占位感应器3检测并将相关信息发送至控制器;
75.控制器控制到位电磁铁82断电,到位电磁铁82与定位铁芯9不吸附,再控制旋转电机7工作,使旋转电机7驱动旋转平台1由最终位置向初始位置复位。
76.旋转平台1复位至初始位置后,原点感应器4检测到并将相关信息发送至控制器。
77.控制器控制原点电磁铁81通电,原点电磁铁81与定位铁芯9吸附,与此同时,控制旋转电机7停止工作,使得旋转平台1停留在初始位置,并与主体框架2固定。
78.至此,完成一个转向动作。
79.控制器是通过plc编写程序控制,现阶段的控制器能够实现根据传感器的检测信号控制电磁铁8和旋转电机7的通断电工作,因此不需要对内部程序进行进一步的说明。
80.由上述工作原理可以看出,如果进通过电磁铁8与定位铁芯9的吸附来控制旋转平台1的停止,可能出现当旋转平台1旋转到位后,在惯性的作用下,无法及时停下,从而导致定位铁芯9与电磁铁8错位的情况,因此在定位装置中增设硬限位块。
81.硬限位块包括上硬限位块10和下硬限位块11,上硬限位块10与转台固定连接,下
硬限位块11与主体框架2固定连接,上硬限位块10和下硬限位块11在水平面上的投影均位于与旋转主轴6的圆心重合的同心圆上。
82.上硬限位块10和下硬限位块11的安装位置与图4类似,及通过上硬限位块10和下硬限位块11之间的接触,来限定旋转平台1与主体框架2之间的可转动角度。
83.提供两个不同的实施例。
84.实施例三
85.作为一个实施例,设定上硬限位块10的数量为两个,分别为原点上限位块和到位上限位块,下硬限位块11的数量为一个,两个上硬限位块10与旋转主轴6之间的连线的夹角等于旋转平台1工作时的转动角度;
86.旋转平台1处于初始位置时,原点上限位块与下硬限位块11贴合抵靠;
87.旋转平台1处于最终位置时,到位上限位块与下硬限位块11贴合抵靠;
88.下硬限位块11设置在原点上限位块与到位上限位块之间。
89.本实施例中,将上硬限位块10的数量设定为两个,即下硬限位块11在两个上硬限位块10之间的弧形区域内进行运动,下硬限位块11在原点上限位块、到位上限位块和旋转主轴6组成的扇形的弧边上移动。
90.通过下硬限位块11与到位上限位块的抵靠撞击来实现旋转平台1旋转到最终位置的初步定位,初步定位后,再通过到位电磁铁82与定位铁芯9的吸合来实现最终固定。
91.类似的,通过下硬限位块11与原点上限位块的抵靠撞击来实现旋转平台1复位到初始位置的初步定位,初步定位后,再通过原点电磁铁81与定位铁芯9的吸合来实现最终固定。
92.实施例四
93.设定下硬限位块11的数量为两个,分别为原点下限位块和到位下限位块,上硬限位块10的数量为一个,两个下硬限位块11与旋转主轴6之间的连线的夹角等于旋转平台1工作时的转动角度;
94.旋转平台1处于初始位置时,原点下限位块与上硬限位块10贴合抵靠;
95.旋转平台1处于最终位置时,到位下限位块与上硬限位块10贴合抵靠;
96.上硬限位块10设置在原点下限位块与到位下限位块之间。
97.本工作原理与实施例三的工作原理相同,只是改变了上硬限位块10和下硬限位块11的数量。
98.旋转平台1的下侧面与主体框架2的上侧面之间设置有间隙层,电磁铁8、定位铁芯9、上硬限位块10、下硬限位块11、原点感应器4、到位感应器5均位于间隙层,占位感应器3设置在旋转平台1上。
99.通过将电磁铁8、定位铁芯9、上硬限位块10、下硬限位块11、原点感应器4、到位感应器5等均设置在间隙层内,可以减少转台的占地面积,避免周围的设备会对转台造成干涉。
100.还可以在间隙层增加一个外壳,避免杂物进入至定位装置内部,造成影响。
101.占位感应器3可以为视觉感应装置,也可以为重量传感器等,不做具体限制。
102.原点感应器4、到位感应器5可以为视觉感应装置,也可以为接近开关等,不做具体限制。+
103.在本说明书的描述中,参考术语“一个实施例/方式”、“一些实施例/方式”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例/方式或示例描述的具体特征、结构、材料或者特点包含于本技术的至少一个实施例/方式或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例/方式或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例/方式或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例/方式或示例以及不同实施例/方式或示例的特征进行结合和组合。
104.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本技术的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
105.本领域的技术人员应当理解,上述实施方式仅仅是为了清楚地说明本实用新型,而并非是对本实用新型的范围进行限定。对于所属领域的技术人员而言,在上述实用新型的基础上还可以做出其它变化或变型,并且这些变化或变型仍处于本实用新型的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1