一种基于数学算法的斗轮机防碰撞系统的制作方法
1.本实用新型涉及散料安全输送领域,特别涉及一种基于数学算法的斗轮机防碰撞系统。
背景技术:
2.斗轮机(简称“大机”)是散货码头堆场作业设备的主要组成部分,主要用于现代化工业散货的连续运输作业。在码头堆场作业过程中,斗轮机可能与其他散货装卸设备同时且在同一作业区工作,如果斗轮机在行走或者回转的过程中,由于环境或者工作人员自身原因,未发现或发现后来不及进行相关操作,设备悬臂之间已经超越安全距离,则非常可能发生两设备之间的碰撞。
3.散货码头中没有较为高效的防碰撞方法来提前预知设备之间是否将发生碰撞。防碰撞方法大多为人工法、扫描仪判断法。现存的方法中对人员的观察或者堆场的环境有较高的要求,因此对于设备的防碰撞都存在一定的不准确性。
4.中国实用新型专利cn213010827u提出了一种斗轮机防碰撞系统,主要通过在斗轮机主体和悬臂末端设置卫星定位系统,当斗轮机的三维坐标与预警区域的三维坐标相交时,发出预警并紧急制动,以此达到防碰撞的目的。但采用这种方法存在的系统误差比较大,而且因其采用卫星定位系统,对于精度要求较高的操作则无法完成,另外需要人工辅助。
技术实现要素:
5.针对上述背景技术中存在的问题,本实用新型提出了一种基于数学算法的斗轮机防碰撞系统,主要是基于处理过的坐标数据,采用了数学防碰撞算法,进行设备的防碰撞系统设计,具体来说就是采用编码器和rfid对单机进行精确定位,编码器目前可达到的厘米级的测量精度,误差可以控制在
±
2cm之间,同时利用rfid对设备的行走位置和回转角度进行精确校正。
6.本实用新型提供了一种基于数学算法的斗轮机防碰撞系统,包括单机设备、rfid系统、plc控制系统;所述单机设备的底部设置有行走机构,所述的行走机构上设置有悬臂机构,所述悬臂一端与悬臂支架枢接,另一端与斗轮机进行枢接;所述斗轮机为:由多个料斗相对枢转轴旋转取料装置,其回转编码器安装在悬臂转轴中,其斗轮机编码器安装在轮毂上。
7.进一步的,所述的rfid系统包括固定部和移动部,所述固定部固定设置在所述斗轮机地面皮带轨道处,每5m安装一个载码体;所述移动部为rfid读写头,与所述固定部固定连接,所述移动部与固定部之间有间距,所述移动部轴线与所述载码体平行;所述rfid系统的控制终端设置在地面上。
8.进一步的,所述的移动部包括信息行走识别器和行走数据读取器,所述信息行走识别器包括设置在所述地面皮带上,包括多个信息存储器,每两个信息储存器之间间隔5
米;所述行走数据读取器,设置在斗轮机上,亦可通过制作连接件安装绝对行走数据读取器。
9.进一步的,所述行走数据读取器读取所述信息储存器数据为非接触式读取。
10.进一步的,所述移动部与固定部间距为10厘米。
11.进一步的,所述的斗轮机、悬臂上安装有编码器,编码器与所述 plc系统进行通讯,其中编码器线性度:12位
±
0.5lsb;圈数精度: 16位;接口形式:modbus总线或dp总线,且所述斗轮机、悬臂、编码器均设置有防撞击保护装置。
12.进一步的,所述对斗轮机位置及悬臂回转角度检测装置需要配置编码纠错装置,其中所述相邻编码纠错装置的间距为30米;位置校准精度:
±
5cm;回转角度校准精度0.2
°
;接口形式:modbus rtu;传输速率10mbps,且所述编码纠错装置上设置有防撞击保护装置。
13.通过测量获取单机设备的一些机构数据,包括斗轮半径,悬臂长度和宽度等。然后设置预碰撞减速值,其为当相邻两单机设备之间三维空间上距离小于40米且大于20米时,如设备进行位置移动,则设备将减速或慢速进行移动;设置预碰撞停机值,其为当相邻两单机设备之间三维空间上距离小于20米且大于10米时,如设备进行位置移动,则设备将停止或无法进行移动。
14.所述的一种基于数学算法的斗轮机防碰撞系统,有以下优点:
15.1.此系统所采用的算法可对悬臂进行准确的位置判断,形成与悬臂之间的动态包围盒,快速、准确的计算出斗轮机与其他设备之间的空间最小距离,实现斗轮机防碰撞功能。
16.2.本系统可与设备控制系统无缝隙连接,实现先减速,后停止的防碰撞功能。
17.3.本系统采用数学算法来进行距离测定,相比于卫星定位系统更加精确,适合斗轮机进行精细化操作。
18.4.本系统零件更换方便利于维护,使得整个设备使用寿命更长。
附图说明
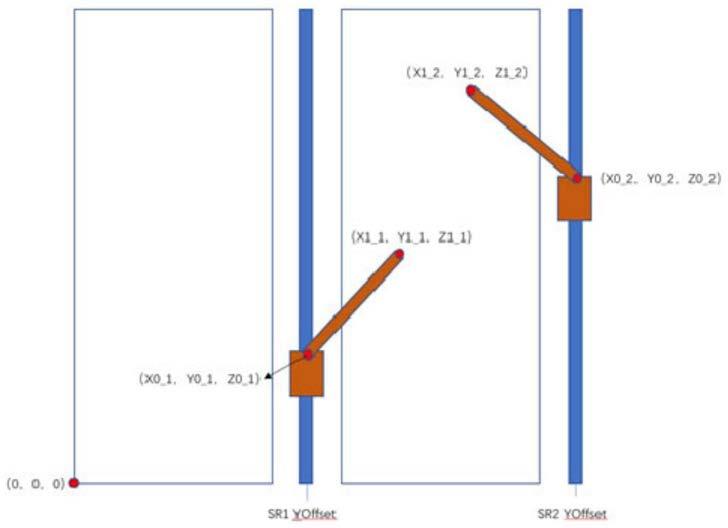
19.图1是本实用新型两斗轮机轨道不同的行走示意图。
20.图2是本实用新型两斗轮机轨道相同的行走示意图。
21.图3是本实用新型斗轮机的整体结构图。
22.其中1-回转rfid读写头安装位置,2-地面皮带机架,3-轨道, 4-斗轮机编码器安装位置,5-斗轮机rfid读写头安装位置,6-载码体安装位置。
具体实施方式
23.以下结合附图对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围。
24.实施例1
25.如背景技术中所提到的,斗轮机的操作中经常因为各种原因会发生碰撞,而现有的技术一般会通过卫星定位技术进行防撞预警,这样的预警系统精确度不够而且系统误差较大。本实用新型提出了一种基于数学算法的斗轮机防碰撞系统,主要是基于处理过的坐标数据,采用了数学防碰撞算法,进行设备的防碰撞系统设计,具体来说就是采用编码器和
rfid对单机进行精确定位,编码器目前可达到的厘米级的测量精度,误差可以控制在
±
2cm之间,同时利用rfid对设备的行走位置和回转角度进行精确校正。
26.本实用新型提出了一种基于数学算法的斗轮机防碰撞系统,包括单机设备、rfid系统、plc控制系统;所述单机设备的底部设置有行走机构,所述的行走机构上设置有悬臂机构,所述悬臂一端与悬臂支架枢接,另一端与斗轮机进行枢接;所述斗轮机为:由多个料斗相对枢转轴旋转取料装置,其回转编码器安装在悬臂转轴中,其斗轮机编码器安装在轮毂上。
27.所述的rfid系统包括固定部和移动部,所述固定部固定设置在所述斗轮机地面皮带轨道处,每5m安装一个载码体;所述移动部为 rfid读写头,与所述固定部固定连接,所述移动部相对于固定部有一定的距离,所述移动部轴线与所述载码体平行;所述rfid系统的控制终端设置在地面上。
28.所述系统基于数学算法对空间距离进行计算及预警,所用数学原理为:
29.1.理论依据:点到线的直线距离,即为点到线的最短距离。
30.2.公式:
[0031][0032]
3.公式推导过程
[0033]
由向量方法推导点到直线的距离公式:
[0034]
证明:由直线l的方程:ax+by+c=0,(a,b不能同时为0),可得直线l的方向量为n=(a,b),设过点p(x_0,y_0)作直线l的垂线,垂足为p`(x`,y`),则向量(pp`)=λn,
[0035]
即(x`-x0,y`-y0)=λ(a,b),所以x`=x0+λa,y`=y0+λb,
[0036][0037]
又因为点p`(x`,y`)在直线l上,所以就有:ax`+by`+c=0,
[0038]
即a(x0+λa)+b(y0+λb)+c=0,
[0039]
所以λ(a2+b2)=-(ax0+by0+c),又因为a,b不能同时为0,
[0040]
所以得出
[0041]
所
[0042]
即:
[0043]
经过此公式的推导,可以提出假设:
[0044]
在堆场空间环境的情况下,前面的设备看作一条直线,后面的设备作点。
[0045]
如图1为假设的机构空间位置,左侧设备为sr1,右侧设备为sr2。左侧设备为点:sr1;右侧设备为直线:sr2。根据sr2的两个坐标系,计算出sr2悬臂这条直线的方程式,然后计算点sr1(x1_1,y1_1) 到sr2悬臂直线的距离。
[0046]
同理,如果sr1在前方,sr2在后方。通过sr1的两个坐标点计算sr1悬臂直线的方程式,然后计算出sr2点(x1_2,y1_2)到sr1 悬臂直线的距离。
[0047]
若两设备在同一轨道中,假设位置如图2,前面设备为r1,后面设备为s2。r1与s2的悬臂前端可能发生碰撞。
[0048]
当斗轮机与堆料机在左侧堆场同一个垛位的情况下进行作业时,取料机的悬臂前端斗轮与堆料机出料口的距离不能过近,否则极有可能发生两机之间的碰撞,为了避免此情况的发生,需要规定一段安全距离。
[0049]
根据r1的两个坐标系计算出r25悬臂这条直线的方程式,然后计算s2点(x0_2,y0_2)到r1悬臂直线的距离,此距离即可定义为防碰撞所需的距离。
[0050]
进一步的,所述的移动部包括信息行走识别器和行走数据读取器,所述信息行走识别器包括设置在所述地面皮带上,包括多个信息存储器,选用载码体作为信息储存器,每两个信息储存器之间间隔5米;所述行走数据读取器,设置在在斗轮机上,亦可通过制作连接件安装绝对行走数据读取器。
[0051]
进一步的,所述行走数据读取器读取所述信息储存器数据为非接触式读取。
[0052]
进一步的,所述移动部距离固定部间距约为10厘米。
[0053]
进一步的,所述的斗轮机、悬臂上安装有编码器,编码器与所述plc系统进行通讯,其中编码器线性度:12位
±
0.5lsb;圈数精度:16位;接口形式:modbus总线或dp总线,且所述斗轮机、悬臂、编码器均设置有防撞击保护装置。
[0054]
进一步的,所述对斗轮机位置及悬臂回转角度检测装置需要配置编码纠错装置,其中所述编码纠错装置具有位置校准为30米一个;位置校准精度:
±
5cm;回转角度校准精度0.2
°
;接口形式:modbusrtu;传输速率10mbps,且所述编码纠错装置上设置有防撞击保护装置。
[0055]
通过测量获取单机设备的一些机构数据,包括斗轮半径,悬臂长度和宽度等。然后设置预碰撞减速值,其为当相邻两单机设备之间三维空间上距离小于40米且大于20米时,如设备进行位置移动,则设备将减速或慢速进行移动;设置预碰撞停机值,其为当相邻两单机设备之间三维空间上距离小于20米且大于10米时,如设备进行位置移动,则设备将停止或无法进行移动。
[0056]
实施例2
[0057]
所述的编码器的数据校准可结合卫星定位系统与编码器进行相互校准,可进一步提高校准精度,系统其他组成部分不变。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1