一种超大量程拉绳传感器及拉绳回收装置的制作方法
1.本实用新型涉及拉绳传感器领域,具体涉及一种超大量程拉绳传感器及拉绳回收装置。
背景技术:
2.拉绳传感器作为滑坡裂缝监测中的重要传感器之一,在实际监测中起到重要作用,但传统的拉绳传感器的量程一般只有1~2米,超过5米量程的传感器因体积较大不便安装使用。专利号为“202021889862.1”的实用新型专利公开了一种“超大量程拉绳传感器”,其解决了在滑坡监测中拉绳传感器事先不需要设置量程的问题。其最大量程可以超过60米,且精度《
±
0.05%fs,可应用于绝大多数的滑坡裂缝自动监测,但它缺少一个自动张力和回收装置,我们在模拟滑坡测试时需要往外拉动一段距离,测试完成后则需要手动转动绕线轮收线,造成使用不方便。
技术实现要素:
3.为了解决现有超大量程拉绳传感器无自动张力和测试完成后需全部手动回收的问题,本实用新型提供一种超大量程拉绳传感器及拉绳回收装置,其可实现拉绳的部分或者全部自动回收。
4.本实用新型通过下述技术方案实现:
5.本实用新型第一方面提供一种超大量程拉绳回收装置,包括基座和置于基座内腔内的收线装置,
6.所述基座内腔的侧壁上至少设置一斜孔;
7.所述收线装置包括卷簧、固定在卷簧一端且可卡入斜孔内的卡固结构,所述卷簧的另一端用于固定在用于绕制拉绳的绕线轮的转轴上。
8.本方案基于卷簧的回弹力实现拉绳的自动回收,具体的,在基座内腔内设置斜孔,绕线轮转轴转动带动卷簧收缩蓄力,当拉绳拉出范围较大时,卷簧对卡固结构的作用力,使卡固结构脱离斜孔,拉绳继续被拉出,卡固结构在基座内腔内转动直至拉绳停止被拉出后再次卡入斜孔内。测试结束后,卷簧反向转动,带动绕线轮反向转动实现拉绳的部分自动回收,其回收长度与所配置的卷簧长度、绕线轮直径有关,若拉出的线超出回收能力时再手动转动基座即可将全部拉绳收回。即采用上述结构,其可实现拉绳的自动或辅以手动全部回收。
9.在一种可能的设计中,所述卡固结构为圆圈状锚头。锚头可使卷簧的一端即外端在小于等于一定力的情况下,保持卡在斜孔内;在大于一定力的情况下,脱离斜孔。
10.在一种可能的设计中,所述斜孔有多个。
11.在基座内腔上设置多个斜孔,以提高在超大量程使用时,卷簧蓄力的最大性,提高自动回收的量程。
12.在一种可能的设计中,多个斜孔在基座的圆周方向上均匀设置。
13.本实用新型第二方面提供一种超大量程拉绳回收装置,包括基座和置于基座内腔内的收线装置,
14.所述收线装置包括收线盘和置于收线盘内的卷簧,所述卷簧的一端固定在收线盘的内壁上且另一端用于固定在拉绳绕线轮的转轴上;
15.所述基座的内腔壁上至少设置有一个与收线盘接触的限位装置,所述限位装置使在与收线盘之间的摩擦力小于等于一阈值时收线盘与基座不发生相对转动。
16.本方案同样基于卷簧的弹力实现自动回收,具体的,在基座内腔内设置收线盘,绕线轮转轴转动带动卷簧收缩蓄力,此时,收线盘与基座保持相对静止,绕线轮继续转动,卷簧对收线盘的作用力在切线方向上的作用力大于限位装置与收线盘的摩擦力后,收线盘转动,直至拉动结束。测试结束后,卷簧反向转动,带动绕线轮反向转动实现拉绳的部分自动回收,再手动转动基座即可将全部拉绳收回。即采用上述结构,其可实现拉绳的全部或者部分自动回收。
17.在一种可能的设计中,所述限位装置包括与收线盘接触的摩擦块和用于推动摩擦块向收线盘一侧移动的推动装置。
18.本方案采用摩擦块和推动装置的结构,其结构简单,制作成本低。
19.在一种可能的设计中,所述推动装置为弹簧。
20.在一种可能的设计中,所述限位装置有两个,且分别置于收线盘一直径的两端,也可以有多个。
21.本实用新型第三方面提供一种超大量程拉绳传感器,包括拉绳、用于绕制拉绳的绕线轮和用于检测拉绳被拉出长度的传感器,所述绕线轮的转轴上固定有凸轴,还包括第一方面、第二方面及其任一种可能所述的超大量程拉绳回收装置,所述卷簧的另一端固定在凸轴上。
22.在一种可能的设计中,还包括主动轮、引线轮,所述引线轮有两个且分别置于主动轮的前端和后端,所述引线轮之间设置有挡板。
23.本实用新型与现有技术相比,具有如下的优点和有益效果:
24.1、本实用新型的拉绳回收装置基于卷簧的弹力实现自动回收,通过在基座内腔内设置斜孔,在卷簧的一端设置可卡入斜孔的卡固结构;测试时用力往外拉卷簧收紧,放松后自动收回拉绳;当拉绳拉出长度较长时,卷簧对卡固结构的作用力,使卡固结构脱离斜孔,拉绳继续被拉出,卡固结构在基座内腔内转动直至拉绳停止被拉出,测试结束,在卷簧的作用力下,可带动绕线轮反向转动实现拉绳的部分回收,拉绳多拉出部分靠手动收回。在实际滑坡监测中拉绳一般都是往外拉出,除非在拆除监测设备时才会有拉线收回的情况。
25.2、本实用新型通过在基座内腔内设置收线盘,绕线轮转轴转动带动卷簧收缩蓄力,此时,收线盘与基座保持相对静止,绕线轮继续转动,卷簧对收线盘的作用力在切线方向上的作用力大于限位装置与收线盘的摩擦力后,收线盘转动,直至测试结束。测试结束后,卷簧反向转动,带动绕线轮反向转动实现拉绳的部分或全部自动回收。
26.3、本实用新型的拉绳传感器基于上述任一拉绳回收装置,在测试完成后,可实现拉绳的部分或全部自动回收。
附图说明
27.此处所说明的附图用来提供对本实用新型实施例的进一步理解,构成本技术的一部分,并不构成对本实用新型实施例的限定。
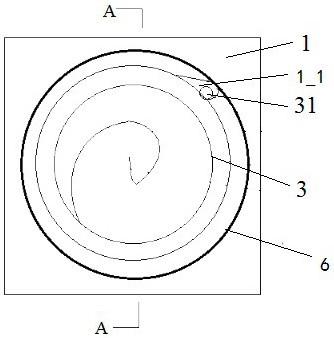
28.图1为本实用新型一拉绳回收装置的结构示意图。
29.图2为图1的a-a视图。
30.图3为本实用新型另一拉绳回收装置的一结构示意图。
31.图4为本实用新型另一拉绳回收装置的另一结构示意图。
32.图5为图3或图4的b-b视图。
33.图6为本实用新型拉绳传感器的正面剖视图。
34.图7为本实用新型拉绳传感器的侧面剖视图。
35.图中的附图标记名称为:
36.1、基座;1_1、斜孔;2、收线盘;2_1、圆孔;3、卷簧;31、卡固结构;41、摩擦块;42、推动装置;6、绕线轮;61、凸轴;7、传感器;8、拉绳;9、支架;10、主动轮;11、引线轮;12、挡板。
具体实施方式
37.为使本实用新型的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本实用新型作进一步的详细说明,本实用新型的示意性实施方式及其说明仅用于解释本实用新型,并不作为对本实用新型的限定。
38.实施例1
39.如图1、2所示,本实施例公开一种超大量程拉绳回收装置,包括基座1和置于基座1内腔内的收线装置。基座内腔优选为截面呈圆形结构,当然,也可为方形等结构,其截面结构并不构成对本方案的限制,只要不影响收线装置即可。在基座1内腔的侧壁上至少设置一斜孔1_1;收线装置包括卷簧3和可卡入斜孔1_1内的卡固结构31。卷簧绕制在基座内腔内,其一端即外端固定在卡固结构上,另一端即内端用于固定在用于绕制拉绳的绕线轮6的转轴上。卡固结构可采用圆圈状锚头结构实现。
40.斜孔至少设置1个,即其可仅设置一个,如图1所示;也可同时设置多个。较佳的,斜孔同时设置多个。斜孔设置多个时,多个斜孔在基座1的圆周方向上均匀设置。
41.实施例2
42.如图3、4、5所示,本实施例公开一种超大量程拉绳回收装置,包括基座1和置于基座1内腔内的收线装置。收线装置包括收线盘2和置于收线盘2内的卷簧3。所述卷簧3的一端固定在收线盘2的内壁上且另一端用于固定在用于绕制拉绳的绕线轮6的转轴上。具体的,卷簧3可直接固定在收线盘内壁上,如图3所示;也可在收线盘内壁上设置一圆孔2_1,将卷簧3一端固定在圆孔2_1内,如图4所示。
43.基座1的内腔壁上至少设置有一个与收线盘2接触的限位装置,所述限位装置使在与收线盘2之间的摩擦力小于等于一阈值时收线盘2与基座1不发生相对转动。
44.限位装置包括与收线盘2接触的摩擦块41和用于推动摩擦块41向收线盘2一侧移动的推动装置42。具体的,推动装置42可采用弹簧的结构实现。
45.限位装置至少设置一个,优选的,可设置多个。较佳的设置两个,且分别置于收线盘2一直径的两端。
46.实施例3
47.如图1至图6、7所示,本实施例公开一种超大量程拉绳传感器,包括拉绳8、用于绕制拉绳的绕线轮6和用于检测拉绳8被拉出长度的传感器7,所述绕线轮6的转轴上固定有凸轴61,还包括实施例1或者实施例2中的超大量程拉绳回收装置,所述卷簧3的另一端固定在凸轴61上。具体的,可在凸轴上设置一槽,将卷簧的另一端固定在该槽中。
48.为了提高拉绳传感器的使用可靠性,避免拉绳脱离,包括主动轮10、引线轮11,所述引线轮11有两个且分别置于主动轮10的前端和后端,所述引线轮11设置有挡板12以防拉绳脱槽。
49.为了避免测试过程中,拉绳被其他物质阻挡影响测试,可在绕线轮外设置一支架9,实现绕线轮的包覆,实现隔离。
50.本实施例中拉绳传感器,其采用实施例1中的拉绳回收装置时,具有两种工作状态:
51.一、滑坡距离小于等于一距离,即滑坡距离小于等于卷簧最大自动可回收距离。测试时,拉绳被拉出,带动绕线轮转动,卷簧收缩蓄力,卡固装置保持在斜孔中的状态至测试结束。测试结束后,卷簧反向转动,带动绕线轮反向转动将拉绳全部自动收回。
52.二、滑坡距离大于一距离,即滑坡距离大于卷簧最大自动可回收距离。测试时,拉绳被拉出,带动绕线轮转动,卷簧收缩蓄力,卡固装置保持在斜孔中。当拉绳被拉出的距离大于该距离后,卷簧的作用力将卡固装置脱离斜孔,卡固装置在基座内腔中转动直至拉绳停止被拉出,卡固装置重新卡入斜孔中。测试结束后,卷簧反向转动,带动绕线轮反向转动将拉绳部分自动收回,此时,再手动转动基座即可将全部拉绳收回。
53.本实施例中拉绳传感器,其采用实施例2中的拉绳回收装置时,其同样具有两种工作状态:
54.一、滑坡距离小于等于一距离,即滑坡距离小于等于卷簧最大自动可回收距离。拉绳被拉出,带动绕线轮转动,卷簧收缩蓄力,卷簧产生一恒定张力崩紧拉绳,收线盘与基座保持相对静止状态。测试结束后,卷簧反向转动,带动绕线轮反向转动将拉绳全部自动收回。
55.二、滑坡距离大于一距离,即滑坡距离大于卷簧最大自动可回收距离。开始时拉绳被拉出,带动绕线轮转动,卷簧收缩蓄力,收线盘与基座保持相对静止状态。当拉绳被拉出的距离大于回收距离后,卷簧对收线盘的作用力在切线方向上的作用力大于限位装置与收线盘的摩擦力,收线盘转动直至拉绳停止被拉出。测试结束后,卷簧反向转动,带动绕线轮反向转动将拉绳部分自动收回,此时,再手动转动基座即可将全部拉绳收回。
56.以上所述的具体实施方式,对本实用新型的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施方式而已,并不用于限定本实用新型的保护范围,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1