一种压缩机上下料装置的制作方法
1.本实用新型涉及一种工业自动化加工设备,尤其涉及一种压缩机上下料装置。
背景技术:
2.压缩机通常为重量较大的圆柱体,在压缩机安装过程中,需要将压缩机安放在料板(泡沫底托)上,由于压缩机很重,搬运过程劳动强度很大,为了减轻劳动力强度、提高效率,人们想通过机器人代替人工完成压缩机的搬运装配,现有公开号cn203622443u,公开日:2014年6月4日,名称为一种用于家电压缩机上下料的机器人手爪的实用新型专利,其公开了用于抓取运送压缩机的机械手抓,但是在整个料板的安装过程中,还缺少其他自动化的上下料装置。
技术实现要素:
3.针对上述现存的技术问题,本实用新型提供一种压缩机上下料装置,方便定位装配压缩机和料板,输送速度快,自动化程度高。
4.为解决上述技术问题,本实用新型采用如下技术方案:一种压缩机上下料装置,包括顶部摄像头、上料装置、阻挡定位装置、输送装置、底部摄像头、plc控制柜和电控箱;所述输送装置侧部设有压缩机储存区和料板储存区;所述输送装置有一段为上料位,输送装置上方设有用于拍摄上料位上料板的顶部摄像头,输送装置一侧设有用于拍摄抓取压缩机的底部摄像头;所述阻挡定位装置安装在输送装置的上料位,阻挡定位装置卡住或松开处于上料位的料板;所述上料装置位于输送装置的一侧,从压缩机储存区抓取压缩机放置到输送装置上料位的料板上;所述plc控制柜和电控箱布置在上料装置旁边,对各装置部件进行控制和供电。
5.采用上述技术方案的有益效果是:在现有压缩机机械爪的基础上,本实用新型增加了顶部摄像头和阻挡定位装置,可以快速精准的对料板进行定位,增加底部摄像头和工业机器人对压缩机进行抓取定位,并将压缩机装配到料板上,通过输送装置完成料板,以及装配好料板的压缩机进行输送,可以极大的降低人工成本,生产效率大大的提高了。
6.本实用新型进一步的,所述上料装置包括用于夹取筒形物体的机械爪、工业机器人和机器人底座;所述工业机器人为abb工业机器人,安装在机器人底座上,所述机械爪与工业机器人机械臂连接。
7.采用上述技术方案的有益效果是:abb工业机器人具有自由度高,动作灵活的特地昂,可以利用abb机器人的smartac选项进行定位抓取。
8.本实用新型进一步的,所述输送装置为输送滚筒。
9.采用上述技术方案的有益效果是:滚筒输送机结构简单,可靠性高,维护方便,也便于其它部件的排布。
10.本实用新型进一步的,所述阻挡定位装置包括夹钳、气缸、夹钳固定端和转轴;所述气缸有一对,通过安装架固定在输送装置上料位两侧下方,所述夹钳有一对,夹钳上部穿
过输送滚筒位于上料位上料板两侧,夹钳下部一端与气缸活塞端连接,另一端并分别通过转轴与夹钳固定端铰接,所述夹钳固定端固定在气缸缸体上,气缸顶出带动两夹钳以转轴为轴心向内侧夹紧料板。
11.采用上述技术方案的有益效果是:当料板通过输送装置运送至上料位时,夹钳通过气缸控制能够快速牢固的固定住料板,方便进行压缩机的装配,待装配完后,再松开料板,送出并进行下一压缩机的装配。
12.本实用新型进一步的,所述输送装置上还设置有侧推机构、所述侧推机构包括位于输送装置上一侧的侧推杆和输送装置上另一侧的挡板;所述侧推杆通过在输送装置的底部的气缸控制,由本侧向挡板一侧移动,将输送装置上的料板推抵在挡板上定位。
13.采用上述技术方案的有益效果是:便于对料板进行排齐定位。
14.本实用新型进一步的,所述输送装置上料位傍还设置有暂存工位,所述暂存工位包括安装板、侧支架和用于暂时存放压缩机的暂存机架;所述暂存机架,一侧连接侧支架,所述底部摄像头通过安装板固定在侧支架上,所述底部摄像头为工业ccd相机。
15.采用上述技术方案的有益效果是:暂存机架可用于暂时存放加工物料,并将底部摄像头安装于此,方便定位压缩机的抓取位置。
16.本实用新型进一步的,所述输送装置上料位上设置有安全光幕。
17.采用上述技术方案的有益效果是:避免造成作业人员的人身伤害。
18.本实用新型进一步的,所述顶部摄像头为工业ccd相机,顶部摄像头固定在输送装置一侧的顶部机架上。
19.采用上述技术方案的有益效果是:ccd相机体积小、重量轻、不受磁场影响、具有抗震动和撞击等特性。
20.本实用新型进一步的,所述压缩机储存区和料板储存区为料车。
21.采用上述技术方案的有益效果是:方便运送物料。
22.本实用新型进一步的,所述上料装置、输送装置、压缩机储存区和料板储存区外侧设有安全围栏。
23.采用上述技术方案的有益效果是:用来隔离人和设备,保持安全。
附图说明
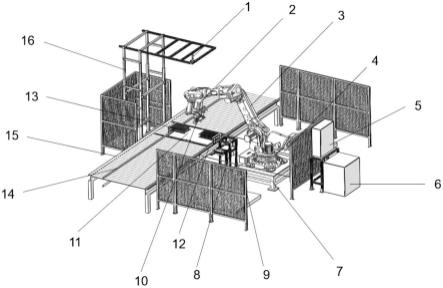
24.图1为本实用新型的结构示意图;
25.图2为本实用新型阻挡定位装置的结构示意图;
26.图3为本实用新型的侧推机构示意图;
27.图4为本实用新型的侧推机构示意图;
28.图5位本实用新型的暂存工位示意图;
具体实施方式
29.下面结合附图对本实用新型作进一步详细说明。
30.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,
可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
31.本实用新型的一种实施例:如图1所示,一种压缩机上下料装置,包括顶部摄像头1、上料装置、阻挡定位装置21、输送装置15、底部摄像头17、plc控制柜5和电控箱6;所述输送装置侧部设有压缩机储存区4和料板储存区9;所述输送装置有一段为上料位,输送装置上方设有用于拍摄上料位上料板11的顶部摄像头1,输送装置一侧设有用于拍摄抓取压缩机10的底部摄像头17;所述阻挡定位装置21安装在输送装置的上料位,阻挡定位装置21卡住或松开处于上料位的料板11;所述上料装置位于输送装置的一侧,从压缩机储存区4抓取压缩机放置到输送装置上料位的料板上;所述plc控制柜5和电控箱6布置在上料装置旁边,对各装置部件进行控制和供电。本实用新型在现有压缩机机械爪的基础上,增加了顶部摄像头和阻挡定位装置21,可以快速精准的对料板进行定位,增加底部摄像头和工业机器人对压缩机进行抓取定位,并将压缩机10装配到料板11上,通过输送装置15完成料板11,以及装配好料板的压缩机进行输送,可以极大的降低人工成本,生产效率大大的提高了。
32.在本实用新型的另一些具体实施方式中,其余与上述实施方式相同,不同之处在于,如图1所示,所述上料装置包括用于夹取筒形物体的机械爪2、工业机器人3和机器人底座7;所述工业机器人3为abb工业机器人,安装在机器人底座7上,所述机械爪2与工业机器人3机械臂连接。abb工业机器人具有自由度高,动作灵活的特地昂,可以利用abb机器人的smartac选项进行定位抓取。
33.在本实用新型的另一些具体实施方式中,其余与上述实施方式相同,不同之处在于,如图1所示,所述输送装置15为输送滚筒。滚筒输送结构简单,可靠性高,维护方便,也便于其它部件的排布。
34.在本实用新型的另一些具体实施方式中,其余与上述实施方式相同,不同之处在于,如图2和图3所示,阻挡定位装置21包括夹钳2101、气缸2102、夹钳固定端2103和转轴2104;所述气缸2102有一对,通过安装架22固定在输送装置15上料位两侧下方,所述夹钳2101有一对,夹钳上部穿过输送滚筒位于上料位上料板两侧,夹钳下部一端与气缸2102活塞端连接,另一端并分别通过转轴2104与夹钳固定端2103铰接,所述夹钳固定端2103固定在气缸2102缸体上,气缸2102顶出带动两夹钳2101以转轴2104为轴心向内侧夹紧料板11。当料板通过输送装置运送至上料位时,夹钳2101通过气缸控制能够快速牢固的固定住料板,方便进行压缩机的装配,待装配完后,再松开料板,送出并进行下一压缩机的装配。
35.在本实用新型的另一些具体实施方式中,其余与上述实施方式相同,不同之处在于,如图1和图2所示,所述输送装置15上还设置有侧推机构、所述侧推机构包括位于输送装置上一侧的侧推杆14和输送装置上另一侧的挡板12;所述侧推杆14通过在输送装置的底部的气缸控制,由本侧向挡板12一侧移动,将输送装置上的料板11推抵在挡板12上定位。该实施例侧推机构便于对料板进行排齐定位。
36.在本实用新型的另一些具体实施方式中,其余与上述实施方式相同,不同之处在于,如图4所示,所述输送装置15上料位傍还设置有暂存工位8,所述暂存工位8包括安装板18、侧支架19和用于暂时存放压缩机10的暂存机架20;所述暂存机架20,一侧连接侧支架19,所述底部摄像头17通过安装板18固定在侧支架19上,所述底部摄像头17为工业ccd相机。暂存机架20可用于暂时存放加工物料,并将底部摄像头安装于此,方便定位压缩机的抓
取位置。
37.在本实用新型的另一些具体实施方式中,其余与上述实施方式相同,不同之处在于,如图1所示,所述输送装置15上料位上设置有安全光幕13,避免造成作业人员的人身伤害。
38.在本实用新型的另一些具体实施方式中,其余与上述实施方式相同,不同之处在于,如图1所示,所述顶部摄像头1为工业ccd相机,顶部摄像头1固定在输送装置15一侧的顶部机架16上。ccd相机体积小、重量轻、不受磁场影响、具有抗震动和撞击等特性。
39.在本实用新型的另一些具体实施方式中,其余与上述实施方式相同,不同之处在于,如图1所示,所述压缩机储存区4和料板储存区9为料车,方便运送物料。
40.在本实用新型的另一些具体实施方式中,其余与上述实施方式相同,不同之处在于,如图5所示,所述上料装置、输送装置15、压缩机储存区4和料板储存区9外侧设有安全围栏23,用来隔离人和设备,保持安全。
41.结合上述实施例本实用新型的工作过程如下:将料板11手工或是其他机械手段放置在输送装置进料端,顶部摄像头1获取料板11运行至上料位时,侧推机构将料板推齐靠紧挡板12一侧进行定位,而后阻挡定位装置21固定住料板11,工业机械人从压缩机压缩机储存区4抓取压缩机10,放置到料板11上完成装配,阻挡定位装置21松开,输送装置将装配好的件送出,并送入下一料板11进入下个循环。整个设备利用工业相机拍摄压缩机的3d图像,利用halcon的图像处理软件的模板匹配功能,计算出抓取压缩机的位置和料板的定位装配位置,并将相关位置利用tcp/ip协议发送给机器人,引导机器人定位抓取并完成装配。
42.当然上述实施例只为说明本实用新型的技术构思及特点,其目的在于让熟悉此项技术的人能够了解本实用新型的内容并据以实施,并不能以此限制本实用新型的保护范围。凡根据本实用新型主要技术方案的精神实质所做的等效变换或修饰,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1