一种吸盘机构控制阀自动启闭机构的制作方法
1.本实用新型涉及起重设备领域,尤其是涉及一种吸盘机构控制阀自动启闭机构。
背景技术:
2.使用吸盘进行吸附搬运物料,已经是一种常用的设备和手段,目前的吸盘机构,尤其是运用在升降设备,如起重机、升降机、葫芦吊上的吸盘机构,真空吸盘的启闭控制需要额外的手柄,对于一些需要快速转运的物料,通过手柄进行控制,效率较为低下。
技术实现要素:
3.有鉴于此,有必要提供一种结构简单、使用方便的吸盘机构控制阀自动启闭机构。
4.为了解决上述技术问题,本实用新型的技术方案是:一种吸盘机构控制阀自动启闭机构,包括机架、固定架和启闭开关,所述固定架活动连接在机架的下方,所述固定架上固定连接有真空发生器控制阀,所述启闭开关包括固定连接在机架上的固定部、转动连接在固定架上的开关杆,所述固定部具有一用于控制真空发生器控制阀的启闭开关启闭的触发部,所述固定部上具有一环形运动轨道,所述开关杆顶部具有沿环形运动轨道移动的凸轴,所述固定架上连接有迫使凸轴始终沿环形运动轨道做单向移动的驱动元件,所述凸轴沿环形运动轨道移动时,所述启闭开关具有以下工作模式:第一工作模式为固定架相对机架做上升移动,直至触发部按下真空发生器控制阀的启闭开关,使真空发生器控制阀开启;第二工作模式为固定架相对机架保持不动,触发部保持按住真空发生器控制阀的启闭开关的状态,使真空发生器控制阀始终开启;第三工作模式为固定架相对机架做下降移动,直至触发部脱离与真空发生器控制阀的启闭开关的接触,使真空发生器控制阀关闭。
5.进一步的,所述固定架底部固定连接有多个真空吸盘。
6.进一步的,所述机架上具有导向套,所述固定架上固定连接有滑动连接于导向套内的滑杆。
7.进一步的,所述导向套上部的机架上固定连接有与滑杆相匹配的直线轴承。
8.进一步的,所述驱动元件为拉簧,拉簧的一端固定连接在固定架上,另一端固定连接在开关杆的中部。
9.进一步的,所述环形运动轨道包括第一运动轨迹、第二运动轨迹和第三运动轨迹;所述第一运动轨迹为斜面状,以使凸轴沿第一运动轨迹移动时,启闭开关处于第一工作模式;所述第二运动轨迹具有一用于托放凸轴的托槽,以使凸轴沿第二运动轨迹移动时,启闭开关处于第二工作模式;所述第三运动轨迹为斜面状,以使凸轴沿第三运动轨迹移动时,启闭开关处于第三工作模式。
10.进一步的,所述第二运动轨迹入口处上方的固定部上具有一防脱挡块,所述防脱挡块具有一与第一运动轨迹相平行的第四运动轨迹,以使凸轴脱离第一运动轨迹后,第四运动轨迹迫使凸轴进入第二运动轨迹。
11.进一步的,所述机架上部具有控制手杆。
12.与现有技术相比,本实用新型具有以下有益效果:本装置的真空吸盘能够通过自身的相对移动完成真空吸盘的启闭控制,结构简单,使用方便。
13.为让本实用新型的上述和其他目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附图式,作详细说明。
附图说明
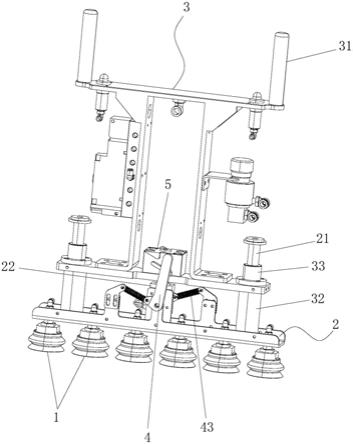
14.图1为本实用新型实施例的结构示意图。
15.图2为本实用新型实施例中固定部的结构示意图。
16.图3为本实用新型实施例中开关杆的结构示意图。
17.图中:1-真空吸盘,2-固定架,21-滑杆,22-真空发生器控制阀,3-机架,31-控制手杆,32-导向套,33-直线轴承,4-开关杆,41-凸轴,42-连接孔,43-拉簧,5-固定部,51-第一运动轨迹,52-第二运动轨迹,53-第三运动轨迹,54-第四运动轨迹,55-托槽,56-触发部。
具体实施方式
18.为更进一步阐述本实用新型为实现预定发明目的所采取的技术手段及功效,以下结合附图及较佳实施例,对依据本实用新型的具体实施方式、结构、特征及其功效作详细说明。
19.如图1-3所示,一种吸盘机构控制阀自动启闭机构,包括机架3、固定架2和启闭开关。
20.固定架2活动连接在机架3的下方,固定架2底部固定连接有多个真空吸盘1,固定架2上中间位置处固定连接有真空发生器控制阀22,真空吸盘1与真空发生器相连接,通过真空发生器控制阀22的触发实现对真空吸盘1的控制。
21.机架3底部两端均固定连接有一导向套32,固定架2上固定连接有滑动连接于导向套32内的滑杆21。机架3在导向套32的上部还固定连接有与滑杆21相匹配的直线轴承33。
22.启闭开关包括固定连接在机架3上的固定部5和转动连接在固定架2上的开关杆4。固定部5具有一用于控制真空发生器控制阀22的启闭开关启闭的触发部56,固定部5上具有一环形运动轨道,开关杆4顶部具有沿环形运动轨道移动的凸轴41,固定架2上连接有迫使凸轴41始终沿环形运动轨道做单向移动的驱动元件,本实施例中,驱动元件优选拉簧43,拉簧43的一端固定连接在固定架2上,另一端固定连接在开关杆的连接孔42处。本实施例中,凸轴41绕环形运动轨道做顺时针运动。
23.本实施例中,机架3上部具有控制手杆31。通过该控制手杆31,在刚性导轨和驱动机构的辅助下,对机架3进行移动控制。
24.环形运动轨道包括第一运动轨迹51、第二运动轨迹52和第三运动轨迹53,第一运动轨迹51和第三运动轨迹53均为斜面状,第二运动轨52迹具有一用于托放凸轴的托槽55,托槽入口侧的第二运动轨迹为斜面,托槽出口侧的第二运动轨迹为垂直的直面。
25.本实施例中,第二运动轨迹52入口处上方的固定部上具有一防脱挡块,防脱挡块具有一与第一运动轨迹相平行的第四运动轨迹54,以使凸轴脱离第一运动轨迹51后,第四运动轨迹54迫使凸轴41进入第二运动轨迹52。
26.凸轴41沿环形运动轨道移动时,启闭开关具有以下工作模式:
27.第一工作模式为:操作人员双手抓住控制手杆31,将真空吸盘1移动至货物上方,然后往下压至真空吸盘1贴紧货物表面且不能再往下压为止,并使固定架2相对机架3做上升移动,此时开关杆4的凸轴41沿第一运动轨迹51斜向上移动,直至触发部56按下真空发生器控制阀22的启闭开关,使真空发生器控制阀22开启,真空吸盘1吸附柱货物表面。
28.第二工作模式为:在机架3被下压至不能下压为止后,即为凸轴41脱离第一运动轨迹51并接触第四运动轨迹54的时候,此时,可以松开控制手杆31,在货物的重力作用下,固定架2自动下降,第四运动轨迹54迫使凸轴进入第二运动轨迹52,本实施例中,第一工作模式下,触发部56下压的行程超过了真空发生器控制阀22的启闭开关开启所需要的下压行程,从而使得凸轴41进入第二运动轨迹后,在货物重力作用下,凸轴41先沿第二运动轨迹52的斜面斜向下移动,直至进入第二运动轨迹52中的卡槽55内保持不动,凸轴41从斜向下移动至进入卡槽55内的全程,触发部56始终保持对真空发生器控制阀22的启闭开关的下压状态,即使真空发生器控制阀22的启闭开关始终保持开启状态。
29.第三工作模式为:货物搬运至指定位置后,操作人员双手抓住控制手杆31往下压至不能往下压为止,凸轴41沿第二运动轨迹52的垂直直面上升,在拉簧43的作用下,凸轴41进入第三运动轨迹53,然后松开控制手杆31,在货物重力的作用下,凸轴41沿第三运动轨迹53斜向下移动,直至触发部56脱离与真空发生器控制阀22的启闭开关的接触,使真空发生器控制阀22关闭,真空吸盘1不再吸附货物表面,然后在拉簧43作用下,凸轴41脱离第三运动轨迹53,进入第一运动轨迹51。
30.其中,导向套32设置在机架3和固定架2之间,导向套32不仅起到一个导向移动的作用,还对固定架2的上升高度做了一个位移的限制。
31.以上所述,仅是本实用新型的较佳实施例而已,并非对本实用新型作任何形式上的限制,虽然本实用新型已以较佳实施例揭示如上,然而并非用以限定本实用新型,任何本领域技术人员,在不脱离本实用新型技术方案范围内,当可利用上述揭示的技术内容做出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本实用新型技术方案内容,依据本实用新型的技术实质对以上实施例所作的任何简介修改、等同变化与修饰,均仍属于本实用新型技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1