一种试管分拣机的自动扫描模组的制作方法
1.本实用新型涉及试管分拣设备技术领域,具体涉及一种试管分拣机的自动扫描模组。
背景技术:
2.在医院的日常工作中,经常需要在进行血液等的采集时,向患者发放相应试管,以采集患者的血液等。其中,对患者发放的试管上贴有印制有代表患者信息的条形码,通过扫描该条形码,计算机可读取患者的身份信息。所述身份信息可以包括姓名、性别、采集日期等。医护人员根据采集的血液或尿液还需要进行各种数据、指标的分析。为了方便分析工作的进行,在进行血液的数据、指标的分析之前,对于采集有血液的试管,还需要根据患者的身份、以及进行的数据、指标的分析进行分类,以便将试管送到相应的工作时中进行集中处理。
3.然而,目前对于试管的分类工作,多由人工完成,即:通过人工使用扫描枪对照试管上张贴的条形码进行扫描,如此不但效率较低,且容易出错,进而影响医院正常工作的进行,尤其是不适合大规模样品送检,因此需要改进。
技术实现要素:
4.针对现有技术的不足,本实用新型提出了一种试管分拣机的自动扫描模组,可以实现对试管的自动夹取、旋转、扫描,夹取、移送的范围大,自动化程度高,试管处理的效率高。
5.为实现上述技术方案,本实用新型提供了一种试管分拣机的自动扫描模组,包括:x向直线模组、z向直线模组、y向直线模组、夹取旋转机构和红外扫描仪,所述z向直线模组沿z向安装在x向直线模组上,z向直线模组可沿x方向在x向直线模组上移动,y向直线模组沿y向安装在z向直线模组上,y向直线模组可沿z方向在z向直线模组上移动,夹取旋转机构安装在y向直线模组上且可沿y方向在y向直线模组上移动,至少一个红外扫描仪安装在夹取旋转机构的后方。
6.在上述技术方案中,实际工作时,装满试管的试管架在输送机构的输送下移动至夹取旋转机构的下方,通过x向直线模组、z向直线模组、y向直线模组可以精确调节驱动夹取旋转机构的位置,并通过夹取旋转机构实现对试管架内不同试管的夹取,当夹取旋转机构将试管夹取后进行360
°
的旋转,通过安装在夹取旋转机构后方的红外扫描仪对试管标签进行360
°
扫描,确保扫描成功,并将扫描的数据传送至控制中心进行记录。扫描完成后,夹取旋转机构将扫描后的试管重新插入至试管架内,直至试管架内的试管全部扫描完成,从而实现对试管的自动夹取、旋转、扫描,提高扫描的效率及准确性。
7.优选的,所述夹取旋转机构包括安装座、旋转电机、z向驱动气缸、手指气缸和抓爪,其中安装座安装在y向直线模组上,旋转电机安装在安装座上,至少一个z向驱动气缸竖直向下安装在安装座上,所述旋转电机的输出轴与z向驱动气缸之间通过同步带连接,手指
气缸固定在z向驱动气缸的伸缩轴上,抓爪安装在手指气缸上。实际工作时,通过手指气缸驱动抓爪可以实现对试管架内试管的抓取或者松开,通过z向驱动气缸可以驱动抓爪进行上下移动,通过旋转电机可以驱动z向驱动气缸及抓爪进行360
°
的旋转。
8.优选的,所述安装座上安装有两个并行间隔竖直向下设置的z向驱动气缸,每个z向驱动气缸均通过同步带与旋转电机的输出轴连接,每个z向驱动气缸的后侧均对应设置有一个红外扫描仪,可以确保一次抓取两根试管并进行扫描,提高工作效率。
9.优选的,所述抓爪的内侧贴合有软橡胶保护层,以防止试管在抓取过程中出现破损。
10.优选的,所述x向直线模组包括x向直线滑轨、x向驱动电机、x向滑块,其中x向滑块安装在x向直线滑轨内,x向驱动电机安装在x向直线滑轨的端部且与x向滑块连接,z向直线模组固定在x向滑块上。实际工作时,通过x向驱动电机驱动x向滑块沿x向直线滑轨直线移动,进而可以驱动z向直线模组沿x向直线滑轨直线移动。
11.优选的,所述z向直线模组包括z向直线滑轨、z向驱动电机、z向滑块,其中z向滑块安装在z向直线滑轨内,z向驱动电机安装在z向直线滑轨的端部且与z向滑块连接,y向直线模组固定在z向滑块上。实际工作时,通过z向驱动电机驱动z向滑块沿z向直线滑轨直线移动,进而可以驱动y向直线模组沿z向直线滑轨直线移动。
12.优选的,所述y向直线模组包括y向直线滑轨、y向驱动电机、y向滑块,其中y向滑块安装在y向直线滑轨内,y向驱动电机安装在y向直线滑轨的端部且与y向滑块连接,夹取旋转机构固定在y向滑块上。实际工作时,通过y向驱动电机驱动y向滑块沿y向直线滑轨直线移动,进而可以驱动夹取旋转机构沿y向直线滑轨直线移动。
13.优选的,所述y向直线模组上还安装有气动控制模块,所述气动控制模块与z向驱动气缸、手指气缸之间通过软管连接,通过气动控制模块可以精确控制z向驱动气缸和手指气缸的动作。
14.本实用新型提供的一种试管分拣机的自动扫描模组的有益效果在于:本试管分拣机的自动扫描模组结构简单,设计合理,可以实现对试管的自动夹取、旋转、扫描,夹取、移送的范围大,自动化程度高,试管处理的效率高。实际工作时,装满试管的试管架在输送机构的输送下移动至夹取旋转机构的下方,通过x向直线模组、z向直线模组、y向直线模组可以精确调节驱动夹取旋转机构的位置,并通过夹取旋转机构实现对试管架内不同试管的夹取,当夹取旋转机构将试管夹取后进行360
°
的旋转,通过安装在夹取旋转机构后方的红外扫描仪对试管标签进行360
°
扫描,确保扫描成功,并将扫描的数据传送至控制中心进行记录。扫描完成后,夹取旋转机构将扫描后的试管重新插入至试管架内,直至试管架内的试管全部扫描完成,从而实现对试管的自动夹取、旋转、扫描,提高扫描的效率及准确性。
附图说明
15.图1为本实用新型的立体结构示意图ⅰ。
16.图2为本实用新型的立体结构示意图ⅱ。
17.图3为本实用新型的前视图。
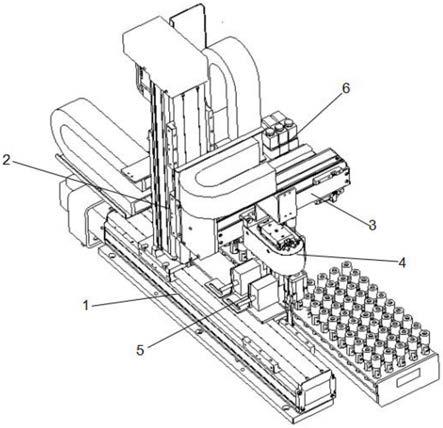
18.图4为本实用新型的立体结构示意图ⅲ。
19.图中:1、x向直线模组;11、x向直线滑轨;12、x向驱动电机;13、x向滑块;2、z向直线
模组;21、z向直线滑轨;22、z向驱动电机;23、z向滑块;3、y向直线模组;31、y向直线滑轨;32、y向驱动电机;33、y向滑块;4、夹取旋转机构;41、安装座;42、旋转电机;43、z向驱动气缸;44、手指气缸;45、抓爪;5、红外扫描仪;6、气动控制模块。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。本领域普通人员在没有做出创造性劳动前提下所获得的所有其他实施例,均属于本实用新型的保护范围。
21.实施例:一种试管分拣机的自动扫描模组。
22.参照图1至图4所示,一种试管分拣机的自动扫描模组,包括:x向直线模组1、z向直线模组2、y向直线模组3、夹取旋转机构4和红外扫描仪5,所述z向直线模组2沿z向安装在x向直线模组1上,z向直线模组2可沿x方向在x向直线模组1上移动,y向直线模组3沿y向安装在z向直线模组2上,y向直线模组3可沿z方向在z向直线模组2上移动,夹取旋转机构4安装在y向直线模组3上且可沿y方向在y向直线模组3上移动,其中,所述x向直线模组1包括x向直线滑轨11、x向驱动电机12、x向滑块13,x向滑块13安装在x向直线滑轨11内,x向驱动电机12安装在x向直线滑轨11的端部且与x向滑块13连接,z向直线模组2固定在x向滑块13上,实际工作时,通过x向驱动电机12驱动x向滑块13沿x向直线滑轨11直线移动,进而可以驱动z向直线模组2沿x向直线滑轨11直线移动;所述z向直线模组2包括z向直线滑轨21、z向驱动电机22、z向滑块23,其中z向滑块23安装在z向直线滑轨21内,z向驱动电机22安装在z向直线滑轨21的端部且与z向滑块23连接,y向直线模组3固定在z向滑块23上,实际工作时,通过z向驱动电机22驱动z向滑块23沿z向直线滑轨21直线移动,进而可以驱动y向直线模组3沿z向直线滑轨21直线移动;所述y向直线模组3包括y向直线滑轨31、y向驱动电机32、y向滑块33,其中y向滑块33安装在y向直线滑轨31内,y向驱动电机32安装在y向直线滑轨31的端部且与y向滑块33连接,夹取旋转机构4固定在y向滑块33上,实际工作时,通过y向驱动电机32驱动y向滑块33沿y向直线滑轨31直线移动,进而可以驱动夹取旋转机构4沿y向直线滑轨31直线移动;通过x向直线模组1、z向直线模组2、y向直线模组3可以精确调节驱动夹取旋转机构4的移动位置;
23.夹取旋转机构4包括安装座41、旋转电机42、z向驱动气缸43、手指气缸44和抓爪45,其中安装座41安装在y向直线模组3的y向滑块33上,旋转电机42安装在安装座41上,两个z向驱动气缸43并行间隔竖直向下安装在安装座41上,每个z向驱动气缸43均通过同步带与旋转电机42的输出轴连接,每个z向驱动气缸43的后侧均对应设置有一个红外扫描仪5,可以确保一次抓取两根试管并进行扫描,提高工作效率,手指气缸44固定在z向驱动气缸43的伸缩轴上,抓爪45安装在手指气缸44上;实际工作时,通过手指气缸44驱动抓爪45可以实现对试管架内试管的抓取或者松开,通过z向驱动气缸43可以驱动抓爪45进行上下移动,通过旋转电机42可以驱动z向驱动气缸43及抓爪45进行360
°
的旋转,抓爪45的内侧贴合有软橡胶保护层,以防止试管在抓取过程中出现破损;
24.y向直线模组3上还安装有气动控制模块6,所述气动控制模块6与z向驱动气缸43、手指气缸44之间通过软管连接,通过气动控制模块6可以精确控制z向驱动气缸43和手指气
缸44的动作。
25.本试管分拣机的自动扫描模组结构简单,设计合理,可以实现对试管的自动夹取、旋转、扫描,夹取、移送的范围大,自动化程度高,试管处理的效率高。实际工作时,装满试管的试管架在输送机构的输送下移动至夹取旋转机构4的下方,通过x向直线模组1、z向直线模组2、y向直线模组3可以精确调节驱动夹取旋转机构4的位置,并通过夹取旋转机构4实现对试管架内不同试管的夹取,当夹取旋转机构4中的手指气缸44驱动抓爪45实现对试管架内试管的抓取后,通过z向驱动气缸43驱动抓爪45向上移动,然后通过旋转电机42可以抓取好试管的抓爪45进行360
°
的旋转,通过安装在z向驱动气缸43后方的红外扫描仪5对试管标签进行360
°
扫描,确保扫描成功,并将扫描的数据传送至控制中心进行记录。扫描完成后,夹取旋转机构4将扫描后的试管重新插入至试管架内,直至试管架内的试管全部扫描完成,从而实现对试管的自动夹取、旋转、扫描,提高扫描的效率及准确性。
26.以上所述为本实用新型的较佳实施例而已,但本实用新型不应局限于该实施例和附图所公开的内容,所以凡是不脱离本实用新型所公开的精神下完成的等效或修改,都落入本实用新型保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1