一种伞面转移下料装置的制作方法
1.本实用新型涉及雨伞制作加工技术领域,尤其涉及一种伞面转移下料装置。
背景技术:
2.现在市场上的雨伞伞面的转移下料的都是由人工进行转移,耗费人工成本大,速度也相对更慢,效率更低。
技术实现要素:
3.为了克服现有技术存在的缺点,本实用新型采用以下技术方案:
4.本实用新型提供了一种伞面转移下料装置,所述下料装置包括第一轨道、支架、伞架平面、放置部、穿杆、x轴移动部、第二轨道、y轴移动部、固定部、z轴直线模组和仿形工装及圆杆,所述第一轨道上移动式设置有所述x轴移动部,所述第二轨道设置在所述x轴移动部上,所述y轴移动部移动式设置在所述第二轨道上,所述固定部设置在所述y轴移动部一侧,所述固定部一侧设置有所述z轴直线模组,所述z轴直线模组下端设置有所述仿形工装,所述仿形工装内部开设有吸附腔,所述吸附腔与负压发生器相连通,所述仿形工装下侧间隔开设有吸附孔,所述吸附孔均与所述吸附腔相连通,所述仿形工装下侧中部设置有所述圆杆,所述放置部位于所述第一轨道下方一侧,所述放置部上侧设置有所述穿杆,所述支架设置在所述放置部一侧,所述伞架平面设置在所述支架上,所述伞架平面中心开设有中心通孔,所述中心通孔的直径大于所述圆杆的直径。
5.作为上述技术方案的进一步改进,还包括有压力传感器,所述仿形工装上侧设置有所述压力传感器。
6.作为上述技术方案的进一步改进,所述压力传感器绕所述仿形工装的中心环形阵列设置在所述仿形工装的上侧。
7.作为上述技术方案的进一步改进,所述放置部为堆垛车。
8.作为上述技术方案的进一步改进,所述第一轨道有两根且为对称设置,所述x轴移动部移动设置在其中一根所述第一轨道上,所述第二轨道一端设置在所述x轴移动部上,所述第二轨道另一端滑动式设置在另一根所述第一轨道上。
9.作为上述技术方案的进一步改进,两根所述第一轨道为一个框架上侧两边的部件,所述放置部和所述支架均位于所述框架内。
10.本实用新型的有益效果为:1、采用x轴移动部、y轴移动部和z轴直线模组及仿形工装构成一个三维移动的机械手,能够实现自动对雨伞伞面的转移下料,提高了工作效率。
11.2、压力传感器绕仿形工装的中心环形阵列设置在仿形工装的上侧,在仿形工装的圆杆与穿杆没有良好接触时,仿形工装下移,会导致与穿杆接触伞面挤压仿形工装触发压力传感器进行报警,机械手停止向下移动,防止压坏伞面。
附图说明
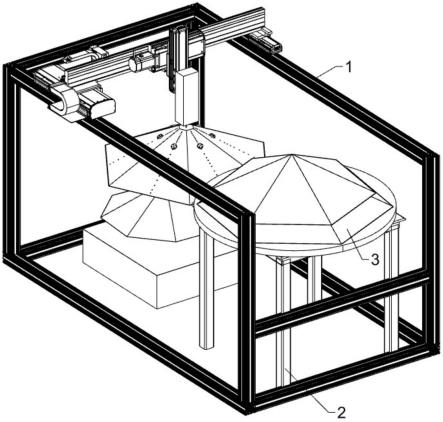
12.图1为本实施例下料装置的结构示意图。
13.图2为本实施例穿杆和放置部的结构示意图。
14.图3为本实施例下料装置的局部结构示意图。
15.图4为图3的仰视图。
16.其中,上述附图包括以下附图标记:1、第一轨道,2、支架,3、伞架平面,4、放置部,5、穿杆,6、x轴移动部,7、第二轨道,8、y轴移动部,9、固定部,91、z轴直线模组,10、仿形工装,11、吸附孔,12、圆杆,13、压力传感器。
具体实施方式
17.现在将参照附图在下文中更全面地描述本实用新型,在附图中示出了本实用新型当前优选的实施方式。然而,本实用新型可以以许多不同的形式实施,并且不应被解释为限于本文所阐述的实施方式;而是为了透彻性和完整性而提供这些实施方式,并且这些实施方式将本实用新型的范围充分地传达给技术人员。
18.在一个实施例中,参考图1-4,本实施例提供一种伞面转移下料装置,下料装置包括第一轨道1、支架2、伞架平面3、放置部4、穿杆5、x轴移动部6、第二轨道7、y轴移动部8、固定部9、z轴直线模组91和仿形工装10及圆杆12;第一轨道1上移动式设置有x轴移动部6,具体地,x轴移动部6为电机和丝杆组成的x轴直线模组,x轴直线模组的电机带动丝杆进行旋转,丝杆旋转带动x轴移动部6进行x轴方向的移动,直至x轴移动部6组移动至伞架平面3的水平位置;第二轨道7设置在x轴移动部6上,y轴移动部8移动式设置在第二轨道7上,具体地,y轴移动部8也为电机和丝杆组成的y轴直线模组,在x轴方向的x轴移动部6确定移动到伞架平面3的水平位置后,y轴直线模组的电机带动丝杆进行旋转,丝杆带动y轴方向的y轴移动部8进行移动,直至y轴方向的y轴移动部8移动至伞架平面3的竖直方向,固定部9设置在y轴移动部8一侧,此时固定部9位于伞架平面3的正上方;固定部9一侧设置有z轴直线模组91,z轴直线模组91下端设置有仿形工装10,仿形工装10内部开设有吸附腔,吸附腔与负压发生器相连通,仿形工装10下侧间隔开设有吸附孔11,吸附孔11均与吸附腔相连通,仿形工装10下侧中部设置有圆杆12,放置部4位于第一轨道1下方一侧,放置部4上侧设置有穿杆5,支架2设置在放置部4一侧,伞架平面3设置在支架2上,伞架平面3中心开设有中心通孔,中心通孔的直径大于圆杆12的直径。
19.在上述实施例中,当固定部9位于伞架平面3的正上方时,z轴直线模组91带动仿形工装10往下移动,进而使得仿形工装10下侧的圆杆12穿入伞架平面3的中心通孔内,仿形工装10继续往下移动,使得仿形工装10下侧与伞架平面3上的伞面与仿形工装10下侧贴合,负压发生器工作,仿形工装10内的吸附腔气压减小,进而通过吸附孔11吸住伞面,z轴直线模组91带动仿形工装10复位,y轴移动部8复位,x轴移动部6复位,进而使得仿形工装10移动到放置部4正上方,使得圆杆12正对下方的穿杆5,z轴直线模组91带动仿形工装10下移,进而使得圆杆12的下端面与穿杆5的上端面相抵,此时z轴直线模组91停止移动,负压发生器反向工作,使得仿形工装10吸附的伞面自由降落于放置部4上,完成雨伞伞面的转移下料。采用x轴移动部6、y轴移动部8和z轴直线模组91及仿形工装10构成一个三维移动的机械手,能够实现自动对雨伞伞面的转移下料,提高了工作效率。
20.在一个实施例中,参照图2和图3,还包括有压力传感器13,仿形工装10上侧设置有压力传感器13,具体地,压力传感器13绕仿形工装10的中心环形阵列设置在仿形工装10的上侧,在仿形工装10的圆杆12与穿杆5没有良好接触时,仿形工装10下移,会导致与穿杆5接触伞面挤压仿形工装10触发压力传感器13进行报警,机械手停止向下移动,防止压坏伞面。
21.在一个实施例中,放置部4为堆垛车。
22.在一个实施例中,参考图1,第一轨道1有两根且为对称设置,x轴移动部6移动设置在其中一根第一轨道1上,第二轨道7一端设置在x轴移动部6上,第二轨道7另一端滑动式设置在另一根第一轨道1上,第一轨道1和第二轨道7为框架的自身结构,减少了设置另外轨道的繁琐和成本。
23.在一个实施例中,参考图1,两根第一轨道1为一个框架上侧两边的部件,放置部4和支架2均位于框架内,在机械手转移下料时都在框架内进行,使得工作区隔离开来,保证生产的安全。
24.以上所述实施例仅表达了本实用新型的优选实施方式,其描述较为具体和详细,但并不能因此而理解为对本实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形、改进及替代,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1