食用菌栽培筐的自动化整形搬运装置的制作方法
1.本实用新型涉及食用菌栽培设备技术领域,特别是涉及一种食用菌栽培筐的自动化整形搬运装置。
背景技术:
2.对食用菌栽培的自动化程度越来越高,特别是对食用菌栽培的栽培瓶搬运时,采用人工搬运太费时费力,所以现有技术中有采用栽培筐将栽培瓶集中起来搬运的机械设备。例如专利申请cn103224141a (申请号:cn201310152559.1)公开了一种对食用菌栽培筐搬运的码垛机械设备,实现了对栽培瓶、栽培筐提升、移动、摆放整齐的工作流程,使得对食用菌栽培筐的码垛过程无需人力搬运,大大提高了对栽培筐搬运的效率,但是经过码垛栽培筐叠放在一起后不能调节栽培筐的摆放位置,不方便使用叉车搬运。
技术实现要素:
3.本实用新型的目的是提供一种食用菌栽培筐的自动化整形搬运装置,能够调节码垛在一起的栽培筐的位置,便于使用叉车进行后续搬运。
4.为了实现上述目的,本实用新型提供一种食用菌栽培筐的自动化整形搬运装置,包括底架、连接于底架上的导轨,导轨上滑动连接有两竖向设置的整形架,两整形架上传动连接有气缸,气缸能够推动整形架相互靠近以对栽培瓶筐的码垛整形。
5.作为优选方案,还包括控制器、与控制器电连接的顶部传感器、底部传感器,顶部传感器连接于整形架的顶部以检测栽培瓶筐的码垛高度,底部传感器连接于底架上以检测整形架的复位状态。
6.作为优选方案,顶部传感器、底部传感器为光电传感器。
7.作为优选方案,底架上设有托板放置区,两整形架设于托板放置区的两侧将栽培瓶筐向托板放置区推动。
8.作为优选方案,每一托板放置区侧向的导轨的数量为2根,导轨的端部固定连接在底架上。
9.作为优选方案,整形架包括与导轨滑动连接的底板、连接于底板上的竖向支撑架,支撑架靠近托板放置区的一侧设有连接座,连接座上连接有横向的第一顶杆,第一顶杆能够推动栽培瓶筐。
10.作为优选方案,第一顶杆的侧壁上设有长条形的连接孔,连接座与连接孔通过螺栓连接。
11.作为优选方案,第一顶杆的高度高于托板放置区上托板的高度。
12.作为优选方案,整形架上设有竖向的第二顶杆。
13.作为优选方案,底架上开设有气缸固定孔,气缸固定于气缸固定孔中,气缸的输出轴与整形架的底部固定连接。
14.本实用新型提供一种食用菌栽培筐的自动化整形搬运装置,包括底架、连接于底
架上的导轨,导轨上滑动连接有两竖向设置的整形架,两整形架上传动连接有气缸,气缸能够推动整形架相互靠近以对栽培瓶筐的码垛整形,整形架能够沿着导轨运动,实现了对栽培筐的位置调节,将码垛后的栽培筐聚拢到一起,提高了栽培筐的稳定性,便于搬运,提高了转运过程的安全性。
15.更近一步地,还包括控制器、与控制器电连接的顶部传感器、底部传感器,顶部传感器连接于整形架的顶部以检测栽培瓶筐的码垛高度,底部传感器连接于底架上以检测整形架的复位状态,当栽培筐码垛到一定高度之后能自动整形,并且能够自动复位,通过自动控制使得本装置能够配合对栽培筐码垛的机械设备一起实现自动码垛、整形,提高了产线的自动化程度。
附图说明
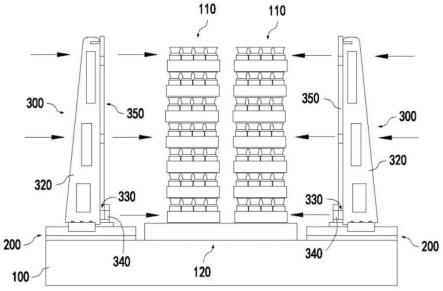
16.图1是本实用新型实施例中的食用菌栽培筐的自动化整形搬运装置的主视结构示意图;
17.图2是本实用新型实施例中的食用菌栽培筐的自动化整形搬运装置的立体结构示意图;
18.图3是本实用新型实施例中的食用菌栽培筐的自动化整形搬运装置的控制结构示意图;
19.图中,100、底架;110、栽培瓶筐;120、托架放置区;130、气缸固定孔;200、导轨;300、整形架;310、底板;320、支撑架;330、连接座;340、顶杆;341、连接孔;350、第二顶杆;400、气缸;500、控制器;510、顶部传感器;520、底部传感器。
具体实施方式
20.下面结合附图和实施例,对本实用新型的具体实施方式作进一步详细描述。以下实施例用于说明本实用新型,但不用来限制本实用新型的范围。
21.如图1至图3所示,本实用新型优选实施例的一种食用菌栽培筐的自动化整形搬运装置,通过自动化控制对码垛完成的栽培筐整形,以调节栽培筐之间的位置,提高了对栽培筐搬运时的安全性和稳定性。
22.基于上述技术方案,本实施例中提供一种食用菌栽培筐的自动化整形搬运装置,包括底架100、连接于底架100上的导轨200,底架100 为用于放置栽培瓶筐110的承托装置,使用码垛机械对栽培瓶筐110 码垛时,往往在底架100上方码垛两列栽培瓶筐110,现有的码垛机械会在两列栽培瓶筐110之间形成间隙,这一间隙导致对码垛完成的栽培瓶筐110搬运时,栽培瓶筐110会发生倾斜、晃动,导致栽培瓶筐110 在搬运中不稳定。本实施例用于对码垛完成的栽培瓶筐110进行推动、对码垛进行整形,提高对码垛完成的栽培瓶筐110搬运时的稳定性。
23.具体地,导轨200上滑动连接有两竖向设置的整形架300,整形架 300用于对码垛完成的栽培瓶筐110进行推动,以推动码垛完成的栽培瓶筐110整齐。
24.具体地,两整形架300上传动连接有气缸400,气缸400用于驱动整形架300移动,在对码垛整形时,气缸400能够推动整形架300相互靠近以对栽培瓶筐110的码垛整形。使得多列栽培瓶筐110之间的间隙能够被挤压缩小,提高了栽培瓶筐110的码垛在搬运时的稳定
性。
25.优选地,还包括控制器500、与控制器500电连接的顶部传感器 510、底部传感器520,控制器500还与气缸400上连接的电磁阀电连接,以控制气缸400的运动状态。其中,控制器500采用单片机。顶部传感器510连接于整形架300的顶部以检测栽培瓶筐110的码垛高度,顶部传感器510用于感应栽培瓶筐110的码垛高度,当码垛机械将栽培瓶筐110码垛到一定高度时,控制器500控制气缸400驱动整形架300移动,进而实现对栽培瓶筐110的移动;底部传感器520 连接于底架100上以检测整形架300的复位状态,当对栽培瓶筐110 完成移动后,控制器500控制气缸400驱动整形架300复位,底部传感器520能够对整形架300是否复位进行检测,检测到整形架300复位后,进入下一个对栽培瓶筐110码垛的工作流程。
26.优选地,顶部传感器510、底部传感器520为光电传感器。
27.优选地,底架100上设有托板放置区120,托板放置区120为叉车进行托板放置区120搬运的托架,两整形架300设于托板放置区 120的两侧将栽培瓶筐110向托板放置区120推动,通过两整形架300 能够对托板放置区120中的多列栽培瓶筐110挤压聚拢,实现对栽培瓶筐110的整形,提高了栽培瓶筐110堆垛的稳定性。
28.优选地,每一托板放置区120侧向的导轨200的数量为2根,两根导轨200能够更好地对整形架300导向,导轨200的端部通过螺栓固定连接在底架100上,便于安装。
29.优选地,整形架300包括与导轨200滑动连接的底板310、连接于底板310上的竖向支撑架320,底板310为整形架300的支撑结构,支撑架320靠近托板放置区120的一侧设有连接座330,竖向支撑架 320用于安装连接座330,连接座330上连接有横向的第一顶杆340,第一顶杆340能够推动栽培瓶筐110。其中,第一顶杆340为对栽培瓶筐110进行推动的推杆,其横截面为矩形,使得与栽培瓶筐110的侧壁为平面,能够保证对栽培瓶筐110推动时的稳定性。第一顶杆 340用于对最底部的栽培瓶筐110进行推动,第一顶杆340的上方也可以设置多根对栽培瓶筐110稳定的侧向支撑杆。
30.优选地,第一顶杆340的侧壁上设有长条形的连接孔341,连接座330与连接孔341通过螺栓连接。通过长条形的连接孔341能够调节第一顶杆340的横向位置。
31.优选地,第一顶杆340的高度高于托板放置区120上托板的高度,以使得第一顶杆340能够与托板上方的栽培瓶筐110的侧壁想配合。
32.优选地,整形架300上设有竖向的第二顶杆350,第二顶杆350 能够用于对竖向的多层栽培瓶筐110的侧壁进行支撑,使得多层栽培瓶筐110能够保持稳定。
33.优选地,底架100上开设有气缸固定孔130,气缸400固定于气缸固定孔130中,气缸400的输出轴与整形架300的底部固定连接,通过气缸固定孔130将气缸400固定在整形架300的下方,能够避免气缸400与整形架300发生干涉,同时,整形架300和气缸400分别位于导轨200的上下两侧,使得气缸400驱动整形架300运动时能够更好地保证整形架300运动的稳定性。
34.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型技术原理的前提下,还可以做出若干改进和替换,这些改进和替换也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1