一种叉车及其自动控制系统的制作方法
1.本专利申请涉及叉车技术领域,特别是涉及一种叉车及其自动控制系统。
背景技术:
2.目前托盘搬运车、堆垛车、平衡重式托盘车在强化过程中存在:1、强化过程不受控,操作人员随意性较大,动作不规范;2、强化循环时间不受控;3、操作人员劳动强度大;4、人员有限,工作时间有限,无法多台车同时强化,效率较低。
技术实现要素:
3.鉴于以上所述现有技术的缺点,本专利申请的目的在于提供一种叉车及其自动控制系统,解决上述现有技术的问题。
4.为实现上述目的,本实用新型提供如下技术方案:
5.一种叉车,包括车架、活动安装在车架前端的车体、安装在车架上端的操纵手柄以及安装在车体前端的货叉,车架的下端安装有驱动轮,所述车架上安装有一使驱动轮运行的驱动系统,车体内安装有一使货叉升降的起升系统,驱动系统包括一驱使驱动轮行走的驱动电机以及一驱使驱动轮摆动转向的转向电机,操纵手柄上安装有一控制驱动电机的控制器组件。
6.进一步的,所述驱动系统还包括有固定在车架内壁上的保持架,保持架的下端安装有驱动轮固定支架,驱动电机连接在驱动轮固定支架的下端,驱动电机的输出轴连接驱动轮。
7.进一步的,所述驱动轮固定支架通过回转轴承转动连接在保持架的下端面上,驱动轮固定支架的上端连接有上端穿过保持架到达保持架上方的转杆,转杆位于保持架上方的一端固定套设有第一齿轮,第一齿轮啮合有第二齿轮,第二齿轮的中部连接在转向电机的输出轴上,转向电机安装在转向电机支架上,转向电机支架通过螺钉拆卸式连接在保持架上。
8.进一步的,所述起升系统包括对称连接在车体内腔两侧呈z型结构的顶板,顶板上方横向段的下端连接有下端连接在保持架上端面上的起升油缸,车体的内侧壁安装有阀体部,阀体部的上端连接有起升电机、下端连接有油箱,起升电机的驱动轴与阀体部内的油泵连接,油泵从油箱内吸取液压油,阀体部通过管路与起升油缸连接。
9.进一步的,所述控制器组件包括固定连接在操纵手柄远离车架一端的加速电机支架,加速电机支架上安装有加速电机,加速电机的输出轴通过联轴器连接换向轴,换向轴连接行车加速器的输出轴,行车加速器固定在加速电机支架上,行车加速器通过电源线控制驱动电机的启动。
10.进一步的,所述货叉的前端安装有一光电开关,车体的一侧安装有距离传感器。
11.一种如前述所述的叉车的自动控制系统,包括安装在操纵手柄上的控制系统,所述控制系统包括单片机,单片机的输入端连接激光感应模块和距离采集模块的输出端,激
光感应模块接收来自光电开关发出的信号,距离采集模块接收来自距离传感器发出的信号,单片机的输出端连接继电器模块和驱动器模块的输入端,继电器模块的输出端连接起升电机和下降开关,下降开关控制阀体部内电磁阀的启闭,驱动器模块的输出端连接加速电机和转向电机。
12.进一步的,所述单片机为stm32f103型号的单片机。
13.进一步的,所述单片机的输入端还连接电源模块的输出端,提供工作所需要的电能。
14.与现有技术相比,本实用新型的有益效果是:
15.1、通过单片机自动控制转向电机启动转向,强化路径可调,目标明确,单片机控制加速电机的旋转角度大小,叉车行驶速度可调,自动化程度高,叉车强化试验中每个循环的动作一致性较高;
16.2、强化循环时间受控,可以根据要求调解循环时间的长短;
17.3、操作人员的劳动强度基本为零;
18.4、无需考虑人员因素,多台车同时进行强化作业,大大提高效率;
19.5、通用性广,能适用于各种吨位的托盘搬运车、堆垛车、平衡重式托盘车。
20.本实用新型叉车及其叉车自动控制系统,解决现有技术缺陷,规范叉车的强化动作杜绝操作随意性,强化循环时间受控,减小操作人员的劳动强度,多台车可同时作业,提高效率。
附图说明
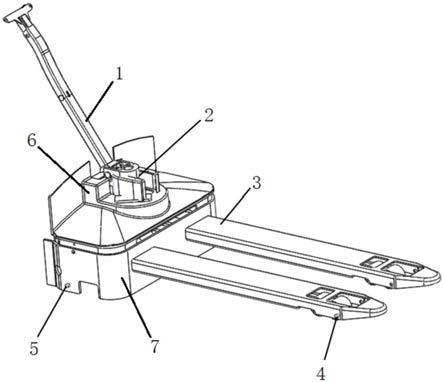
21.图1为本实用新型立体结构示意图;
22.图2为本实用新型车体内部立体结构示意图;
23.图3为本实用新型图2另一视角立体结构示意图;
24.图4为本实用新型图2第三视角立体结构示意图;
25.图5为本实用新型控制器组件立体结构示意图;
26.图6为本实用新型控制系统原理示意图;
27.图7为本实用新型控制方法步骤框图。
28.附图标号说明:操纵手柄1、行车加速器11、换向轴12、联轴器 13、加速电机支架14、加速电机15、驱动系统2、第一齿轮21、驱动轮22、驱动电机23、第二齿轮24、转向电机支架25、转向电机26、起升油缸27、顶板28、起升电机29、油箱210、保持架211、回转轴承212、驱动轮固定支架213、货叉3、光电开关4、距离传感器5、车架6、车体7、单片机100、激光感应模块110、距离采集模块120、继电器模块130、驱动器模块140、下降开关150、电源模块160。
具体实施方式
29.以下通过特定的具体实例说明本专利申请的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本专利申请的其他优点与功效。本专利申请还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本专利申请的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。
30.请参阅图1-7,本实用新型提供一种技术方案:
31.一种叉车,如图1-4所示,包括车架6、活动安装在车架6前端的车体7、安装在车架6上端的操纵手柄1以及安装在车体7前端的货叉 3,货叉3焊接在车体7的前端,车体7被顶起后,货叉3也相应被顶起,车架6的下端安装有驱动轮22,车架6上安装有一使驱动轮22 运行的驱动系统2,车体7内安装有一使货叉3升降的起升系统,驱动系统2包括一驱使驱动轮22行走的驱动电机23以及一驱使驱动轮22 摆动转向的转向电机26,操纵手柄1上安装有一控制驱动电机23的控制器组件,货叉3的前端安装有一光电开关4,车体7的一侧安装有距离传感器5。
32.如图1、图2和图4所示,驱动系统2还包括有固定在车架6内壁上的保持架211,保持架211的下端安装有驱动轮固定支架213,驱动电机23连接在驱动轮固定支架213的下端,驱动电机23的输出轴连接驱动轮22,驱动轮固定支架213通过回转轴承212转动连接在保持架211的下端面上,驱动轮固定支架213的上端连接有上端穿过保持架211到达保持架211上方的转杆,转杆位于保持架211上方的一端固定套设有第一齿轮21,第一齿轮21啮合有第二齿轮24,第二齿轮 24的中部连接在转向电机26的输出轴上,转向电机26安装在转向电机支架25上,转向电机支架25通过螺钉拆卸式连接在保持架211上,拆卸式连接,方便更换维修,转向电机26启动带动第一齿轮21转动啮合第二齿轮24,从而带动驱动轮22转动调整方向,转向电机26控制叉车的左转与右转。
33.如图3和图4所示,起升系统包括对称连接在车体7内腔两侧呈z 型结构的顶板28,顶板28上方横向段的下端连接有下端连接在保持架 211上端面上的起升油缸27,车体7的内侧壁安装有阀体部,阀体部的上端连接有起升电机29、下端连接有油箱210,起升电机29的驱动轴与阀体部内的油泵连接,油泵从油箱210内吸取液压油,阀体部通过管路与起升油缸27连接,通过起升电机29转动将油箱210内的液压油泵入至起升油缸27内,起升油缸27将顶板28顶起,车体7随之被顶起。
34.如图1和图5所示,控制器组件包括固定连接在操纵手柄1远离车架6一端的加速电机支架14,方便操作者操作控制,加速电机支架 14上安装有加速电机15,加速电机15的输出轴通过联轴器13连接换向轴12,换向轴12连接行车加速器11的输出轴,行车加速器11固定在加速电机支架14上,加速器11的旋转角度的大小控制叉车速度的快慢,行车加速器11通过电源线控制驱动电机23的启动。
35.一种叉车的自动控制系统,如图6所示,包括安装在操纵手柄1 上的控制系统,控制系统包括单片机100,单片机100为stm32f103 型号的单片机,单片机100的输入端连接激光感应模块110和距离采集模块120的输出端,激光感应模块110接收来自光电开关4发出的信号,距离采集模块120接收来自距离传感器5发出的信号,单片机 100的输出端连接继电器模块130和驱动器模块140的输入端,继电器模块130的输出端连接起升电机29和下降开关150,,继电器模块130 为4098型号的继电器,驱动器模块140为dh556型号的驱动器,下降开关150控制阀体部内电磁阀的启闭,驱动器模块140的输出端连接加速电机15和转向电机26,单片机100的输入端还连接电源模块160 的输出端,提供工作需要的电能。
36.叉车自动控制系统的控制方法,如图7所示,包括如下步骤:
37.s1、首先,单片机100通过继电器模块130控制起升电机29的开启时长,起升电机29启动将货叉3提升至一定高度,当货叉3提升至目标时长后单片机100通过继电器模块130控
制起升电机29停止;
38.s2、当叉车行使时,单片机100通过驱动器模块140控制加速电机15旋转一定的角度,加速电机15与行车加速器11通过联轴器13 相连,行车加速器11通过电源线控制驱动电机23启动,实现叉车的运行,其中,加速电机15旋转角度的大小控制速度的快慢,改变加速电机15的旋转方向即改变行车加速器11的旋转方向,从而改变叉车的行使方向;
39.s3、在行使过程中,距离采集模块120接收来自距离传感器5的信号,如果监测到叉车跑偏,距离采集模块120将跑偏信号传递给单片机100,单片机100通过驱动器模块140控制转向电机26启动,带动第二齿轮24转动啮合第一齿轮21,第一齿轮21带动驱动轮22转动,调整至目标方向;
40.s4、在行使过程中,激光感应模块110接收来自光电开关4的信号,若到达指定位置,激光感应模块110将信号传递给单片机100,单片机100通过继电器模块130控制下降开关150接通,下降开关150 接通后打开阀体部内的电磁阀,卸去起升油缸27中的液压油,从而控制货叉3下降,完成强化动作要求;
41.s5、步骤s1-s4为二分之一个循环,剩余二分之一个循环按原路返回,如此往复即可完成叉车的多循环强化试验。
42.其中步骤s2和步骤s3无前后顺序要求。
43.上述实施例仅例示性说明本专利申请的原理及其功效,而非用于限制本专利申请。任何熟悉此技术的人士皆可在不违背本专利申请的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本专利申请所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本专利申请的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1