滚焊机料盘辅助器的制作方法
1.本实用新型涉及滚焊机技术领域,尤其涉及一种滚焊机料盘辅助器。
背景技术:
2.在钢筋骨架滚焊机的导轨上,当移动盘沿着导轨移动时,需要在穿好的主筋上绕制钢筋,钢筋一般是需要放置在可转动的放料架(料盘)上,如申请号为cn201810559631.5(申请公开号为cn108941248a)的中国发明专利申请《一种钢筋骨架滚焊机用盘筋放料架》公开了这种放料架结构。但是,料盘的钢筋料出料时由于转动速度不稳定,容易速度过快造成钢筋拉断,速度过慢造成钢筋出筋太多,需要人工实时调节速度以达到出筋速度的稳定,严重影响了滚焊加工效率。
3.故,现有滚焊机料盘装置还需要进一步改进。
技术实现要素:
4.本实用新型所要解决的技术问题是针对现有技术的现状,提供一种能在钢筋出料过程中短暂调节出料速度,使得钢筋出料过程更加稳定的滚焊机料盘辅助器。
5.本实用新型解决上述技术问题所采用的技术方案为:一种滚焊机料盘辅助器,包括:
6.龙门架;
7.料盘,用于存放钢筋,并能由电机驱动而转动设于所述龙门架上;
8.摆动臂,转动设置在滚焊机的引筋架上,该摆动臂上具有供钢筋穿过的导向孔;
9.感应器,设于滚焊机的引筋架上,并位于所述摆动臂的转动路径上,在所述感应器受所述摆动臂触碰而位于抵压状态下,向所述电机发送信号以增大所述料盘的转动速度,以及在所述摆动臂相对所述感应器远离而使所述感应器处于非抵压状态下,向所述电机发送信号以降低所述料盘的转动速度。
10.弹性件,作用于所述的摆动臂,并使所述摆动臂始终具有朝向所述感应器摆动的趋势。
11.在所述钢筋出料过程中处于收紧状态下,所述钢筋向所述摆动臂施加力,使摆动臂远离所述感应器;
12.在所述钢筋出料过程中处于松脱状态下,所述钢筋解除对所述摆动臂施加的力,使摆动臂在所述弹性件的作用下朝向所述感应器偏转。
13.感应器可采用压力敏和力敏传感器、位置传感器、液位传感器、能耗传感器、速度传感器、加速度传感器、射线辐射传感器、热敏传感器等各种现有技术,为了与摆动臂相适配,对摆动臂的摆动角度位置进行有效识别,所述摆动臂具有相对所述转动轴线成角度设置的第一支臂和第二支臂,所述第一支臂上设有所述的导向孔,所述感应器优选为为力敏感应器。
14.为了能使摆动臂自动复位,以及避免摆动臂的第二支臂远离感应器过远考虑,所
述弹性件作用于所述的摆动臂的第二支臂,并使其始终具有朝向所述感应器所在位置摆动的趋势。
15.上述弹性件可以采用包括压簧、扭簧、簧片等各种弹性元件,但为了更好地配合上述摆动臂结构,所述弹性件为拉簧,该拉簧的第一端与所述第二支臂连接,第二端与固定板连接。
16.不同规格的钢筋与摆动臂之间的作用力不同,因而,为了保证摆动臂能有效地摆动至设定角度位置所需要的拉簧的弹力不同,为此,所述固定板上具有间隔布置的多个定位孔,所述拉簧的第二端连接在其中一个定位孔中。
17.为了对摆动臂的摆动角度进行限位,所述料盘的侧壁上还设有用于与所述第二支臂相抵、以限定所述第二支臂的极限摆动角度的止挡柱。
18.为了适配不同规格的钢筋,需要对摆动臂的极限角度位置进行调节,所述固定板上具有向外翻转而与该固定板垂直的翻折板,所述止挡柱为设于所述翻折板上的调节螺栓。
19.为了方便对拉簧及感应器进行合理的空间布置,所述第一支臂和第二支臂之间形成的夹角为钝角。
20.为了适配不同规格的钢筋以及料盘,还包括导向套,该导向套具有连接轴,所述第一支臂沿其长度方向间隔布置有至少两个安装孔,所述导向套的连接轴插设在其中一个安装孔中,所述导向套的内孔即构成了所述的导向孔。
21.为了实现料盘的灵活转动,所述引筋架的侧壁上具有安装轴,该安装轴套设有轴承,所述摆动臂连接在所述轴承上。
22.与现有技术相比,本实用新型的优点:在钢筋出料过程中,钢筋会处于收紧状态以及松脱状态下,而摆动臂会受钢筋作用力不同而摆动至不同的角度位置,其中,感应器能够在摆动臂摆动至不同角度位置时向电机发送相应信号,调节料盘的转动速度,避免料盘转动速度过快或过慢,实现了钢筋出料过程中稳定出料速度的目的,保证了钢筋出料的可靠性。
附图说明
23.图1为本实用新型实施例的立体结构示意图;
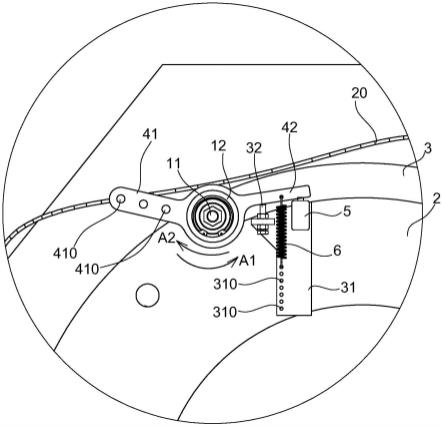
24.图2为图1中a处放大图;
25.图3为引筋架及设置其上的摆动臂等部件相对料盘远离的结构示意图;
26.图4为本实用新型实施例的正视图(感应器处于抵压状态);
27.图5为本实用新型实施例的正视图(感应器处于非抵压状态);
28.图6为图5的部分结构放大图。
具体实施方式
29.以下结合附图实施例对本实用新型作进一步详细描述。
30.在本实用新型的说明书及权利要求书中使用了表示方向的术语,诸如“前”、“后”、“上”、“下”、“左”、“右”、“侧”、“顶”、“底”等,用来描述本实用新型的各种示例结构部分和元件,但是在此使用这些术语只是为了方便说明的目的,是基于附图中显示的示例方位而确
定的。由于本实用新型所公开的实施例可以按照不同的方向设置,所以这些表示方向的术语只是作为说明而不应视作为限制,比如“上”、“下”并不一定被限定为与重力方向相反或一致的方向。
31.参见图1-图6,一种滚焊机料盘辅助器包括龙门架1、料盘2、引筋架3、摆动臂4、弹性件6以及感应器5。
32.料盘2设于龙门架1上,可由电机(未示出)驱动而能相对龙门架1转动,转动方向详见图4。料盘2用于存放输送钢筋20,料盘2的转动用于在钢筋20出料的同时进行收紧,避免其出现严重松脱问题。其中,料盘2可以是立式方式(也即料盘2的轴线为竖向设置),也可以是卧式放置(也即料盘2的轴线为水平设置)。
33.参见图1,料盘2具有两个相对间隔设置的环壁结构21,两个环壁之间的环形凹口200可用于存放钢筋20。
34.滚焊机引筋架4邻近料盘2的环壁结构21设置,并能与料盘2同向旋转,用于将钢筋20从料盘2上脱离并引导至滚焊加工区,为了方便理解,图3示出了引筋架及设置其上的摆动壁等部件相对料盘20远离的状态。引筋架4上设有固定板31,固定板31上设置上述的摆动臂4、弹性件6以及感应器5。
35.固定板31上具有其轴线与料盘2的侧壁面基本垂直的安装轴11,该安装轴11套设有轴承12,摆动臂4连接在轴承12上,从而能以与料盘2的轴线平行的直线为转动轴线o进行摆动。
36.本实施例的摆动臂4具有相对转动轴线o成角度设置的第一支臂41和第二支臂42,其中,第一支臂41与第二支臂42形成的夹角α为钝角。其中,第一支臂41的端部外露出料盘2的外周缘所限定的曲面之外,并且,第一支臂41沿其长度方向间隔布置有至少两个用于装配导向套43的安装孔410,本实施例示出了3个安装孔410。
37.导向套43具有连接轴431,其中,用户可以根据具体的钢筋20及料盘2的规格,将导向套43的连接轴431插设在其中一个安装孔410中。导向套43的内孔可供钢筋20穿过,从而对钢筋20在脱离料盘2过程中进行导向,该导向套43的内孔即构成了导向孔430。由于料盘2在出料过程中转动速度存有差异,所以钢筋20的出料速度不够平稳,与后续钢筋20的用料速度不匹配,其中,摆动臂4能会由处于不同出料速度的钢筋20带动而摆动至不同的角度位置,如,在料盘2的转速过快时,钢筋20会在料盘2外周出现收紧,致使摆动臂4沿第一方向a1偏摆,其第二支臂42远离感应器5,此时,感应器5处于非抵压状态,详见图4,在该状态下,感应器5向控制器发送信号,控制电机降低料盘2的转速,避免钢筋20被拉断;而当料盘2的转速过慢后,也即钢筋20由收紧状态变为相对松脱状态后,摆动臂4反向(也即沿第二方向a2)偏摆,从而使得摆动臂4的第二支臂42在拉簧的弹力作用下朝向感应器5所在位置摆动,并在达到设定角度位置后抵压感应器5,详见图5,在该状态下,感应器5同样会向控制器发送信号,控制电机缓慢增加料盘2的转速,避免钢筋20出现严重的松脱问题。
38.本实施例的感应器5邻近摆动臂4的第二支臂42设置。
39.本实施例的弹性件6优选为拉簧,由于不同规格的钢筋20与摆动臂4之间的作用力不同,因而,为了保证摆动臂4能有效地摆动至设定角度位置所需要的拉簧的弹力不同,上述固定板31上具有间隔布置的多个定位孔310,其中,拉簧的第一端与摆动臂4的第二支臂42连接,第二端连接在其中一个定位孔310中。
40.为了对摆动臂4的摆动角度进行限位,固定板31上还设有用于与第二支臂42相抵、以限定第二支臂42的极限摆动角度的止挡柱32,其中,止挡柱32、感应器5以及拉簧位于第二支臂42的同一侧。具体地,固定板31上具有向外翻转而与该固定板31垂直的翻折板311,本实施例的止挡柱32为螺纹连接在翻折板311上的螺栓,其中,螺栓的伸出长度不同,其对应限定的摆动臂4的极限角度位置不同,可适配不同规格的钢筋20。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1