一种膜丝实时张紧控制机构的制作方法
1.本实用新型属于张紧的技术领域,尤其涉及一种膜丝实时张紧控制机构。
背景技术:
2.透析器包括空心纤维、外壳、密封层和端盖,其被广泛应用于尿毒症患者的治疗。透析器主要是利用半透膜的原理,将尿毒症患者的血液与透析液同时引入透析器内,使两者在透析液室和血液室内反向流动,借助膜两侧的溶质梯度、渗透梯度和水压梯度,来实现清除血液毒素、补充血液营养物质、调节血液ph值的功能。
3.透析膜制成的细长空心纤维经过喷丝、水洗、烘干压弯后形成一根根连续不断的膜丝,由收丝部分将膜丝收集成束,通过旋转指定的圈数得到规定的根数,收满后用包膜纸包裹住,防止膜丝散开,包好的膜丝整体为圆柱形,然后切割成规定的长度,经过后续处理放置到透析器外壳中。膜丝直径很小,和头发丝一样,内部是中空的,经过压弯后带有一定的弯曲,生产过程中要将如此细的膜丝收集起来,并且还需要保留压弯,不能将膜丝扯直,张力控制系统尤为重要。
技术实现要素:
4.本实用新型的目的在于提供一种能检测膜丝的张紧变化程度的膜丝实时张紧控制机构。
5.本实用新型提供一种膜丝实时张紧控制机构,其包括摆臂、与所述摆臂连接的力矩电机、间隔设置的两个换向辊、固定在所述摆臂上的张紧辊、膜丝、收集所述膜丝的收丝臂以及位于所述摆臂上且检测所述摆臂的相对位置的倾角传感器,其中所述膜丝依序经过其中一个换向辊、张紧辊和另一个换向辊后至所述收丝臂进行收集。
6.进一步地,所述力矩电机包括输出轴,所述摆臂的一端与力矩电机的输出轴连接,所述张紧辊固定在摆臂的另一端。
7.进一步地,所述倾角传感器位于所述摆臂的两端之间。
8.进一步地,还包括限制所述摆臂在一定角度内摆动的上限位块和下限位块。
9.进一步地,还包括与所述收丝臂连接的伺服电机。
10.进一步地,还包括支架,两个换向辊间隔固定在所述支架上。
11.进一步地,所述支架包括固定座以及与所述固定座垂直连接的水平座,两个换向辊间隔固定在所述水平座上。
12.进一步地,还包括支撑座,所述支撑座固定在所述固定座上,且力矩电机也固定在所述支撑座上。
13.进一步地,所述换向辊是主动辊。
14.进一步地,所述换向辊是被动辊。
15.本膜丝实时张紧控制机构,通过摆臂的上下摆动,改变张紧辊的位置,起到缓冲膜丝的作用:膜丝拉紧时,摆臂向下摆动释放膜丝;膜丝松弛时,摆臂向上摆动张紧膜丝,从而
使膜丝一直处于一定的张紧程度,避免膜丝被拉直或从收丝臂及辊筒上散落,本实用新型既能检测到膜丝的张紧变化程度,为收丝臂收丝速度提供实时参考,又能起到缓冲的作用,避免膜丝松散时从收丝臂和辊筒上掉落,造成生产线停机。
附图说明
16.下面结合附图和实施例对本实用新型进一步说明:
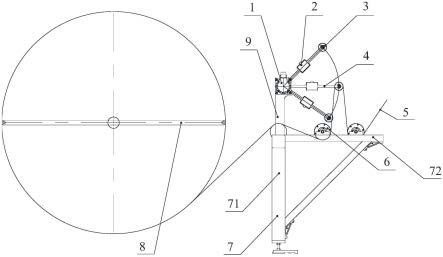
17.图1是本实用新型实施例实时张紧控制机构的结构示意图。
18.图中:力矩电机1、倾角传感器2、张紧辊3、摆臂4、膜丝5、换向辊6、支架7、固定座71、水平座72、收丝臂8、支撑座9。
具体实施方式
19.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型作进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
20.本实用新型一种膜丝实时张紧控制机构,如图1所示,其包括摆臂4、与摆臂4连接的力矩电机1、间隔设置的两个换向辊6、固定在摆臂4上的张紧辊 3、缠绕在两个换向辊6和张紧辊3之间的膜丝5、收集膜丝5形成膜束的收丝臂8以及位于摆臂4上的倾角传感器2,其中膜丝5依序经过其中一个换向辊6、张紧辊3和另一个换向辊6后至由收丝臂8收集并形成膜束。
21.其中,摆臂4的一端与力矩电机4的输出轴连接,力矩电机1为摆臂4提供扭矩,使得摆臂4能向上旋转;张紧辊3固定在摆臂4的另一端。
22.力矩电机1输出力矩为一个合适的值,理想状态下摆臂4处于水平位置,当膜丝5产生的拉力变化时,摆臂4会随之上下摆动使膜丝5一直保持一定的张紧度。
23.膜丝实时张紧控制机构还包括上限位块(图未示)和下限位块(图未示),上限位块位于摆臂4能摆动的最上方的位置上,下限位块位于摆臂4能摆动的最下方的位置上,上限位块和下限位块保证摆臂4在一定的角度内活动,上限位块(图未示)和下限位块(图未示)限制摆臂4在一定角度内摆动。
24.实用新型膜丝实时张紧控制机构还包括与收丝臂8连接的伺服电机(图未示)。
25.倾角传感器2位于摆臂4的两端之间,其能检测到摆臂4的相对位置,以此判断膜丝5的松紧程度,并通过pid算法反馈给收丝臂的伺服电机(图未示),调整收丝臂8的转速。
26.在力矩电机4带动下转动,当收丝臂8收丝不及时,膜丝5出现松散时,摆臂4在力矩电机1的带动下向上摆动将膜丝5拉紧;当收丝臂8收丝过快,将膜丝5拉紧时,摆臂4向下摆动避免膜丝被拉的太紧,将膜丝5的压弯扯直。
27.本实用新型膜丝实时张紧控制机构还包括支架7,两个换向辊6间隔固定在支架7上,其中换向辊6可以是主动辊,辊子自身就可以旋转;换向辊6也可以是被动辊,在膜丝的带动下旋转。
28.支架7包括固定座71以及与固定座71垂直连接的水平座72,两个换向辊 6间隔固定在水平座72上。
29.本实用新型膜丝实时张紧控制机构还包括支撑座9,支撑座9固定在固定座71上,
且力矩电机1也固定在支撑座9上。
30.工作时,膜丝5从其中一个换向辊6经过,绕过张紧辊3,再经过另一个换向辊6后绕在收丝臂8上。收丝臂8在伺服电机(图未示)的带动下做旋转运动收丝。初始状态时,摆臂4位于下限位。此时收丝臂8旋转速度慢,对膜丝5拉力小,膜丝5有松弛的趋势,由于力矩电机1恒定输出扭矩,膜丝5拉力变小时,摆臂4向上摆动,将膜丝拉紧。同时倾角传感器2检测摆臂的位置,将信号反馈到收丝臂8的伺服电机(图未示),带动收丝臂8转速加快,从而将膜丝收紧。当收丝臂8转速过快,对膜丝5的拉力加大时,膜丝将张紧辊3 向下拉动,同时倾角传感器2检测摆臂4的位置,将信号反馈到收丝臂8的伺服电机,带动收丝臂8转速降低,从而减慢收丝速度。最终膜丝始终处于合适的张紧程度,摆臂4达到动态平衡。
31.本膜丝实时张紧控制机构,通过摆臂的上下摆动,改变张紧辊的位置,起到缓冲膜丝的作用:膜丝拉紧时,摆臂向下摆动释放膜丝;膜丝松弛时,摆臂向上摆动张紧膜丝,从而使膜丝一直处于一定的张紧程度,避免膜丝被拉直或从收丝臂及辊筒上散落,本实用新型既能检测到膜丝的张紧变化程度,为收丝臂收丝速度提供实时参考,又能起到缓冲的作用,避免膜丝松散时从收丝臂和辊筒上掉落,造成生产线停机。
32.以上所述,仅是本实用新型的较佳实施例而已,并非对本实用新型作任何形式上的限制,虽然本实用新型已以较佳实施例揭露如上,然而并非用以限定本实用新型,任何熟悉本专业的技术人员,在不脱离本实用新型技术方案范围内,当可利用上述揭示的技术内容做出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本实用新型技术方案内容,依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本实用新型技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1